
 商标分类
商标分类  商标转让
商标转让 
一种甲醇燃料电池无人机的制作方法
 2021-02-03 14:02:24|
2021-02-03 14:02:24| 271|
271| 起点商标网
起点商标网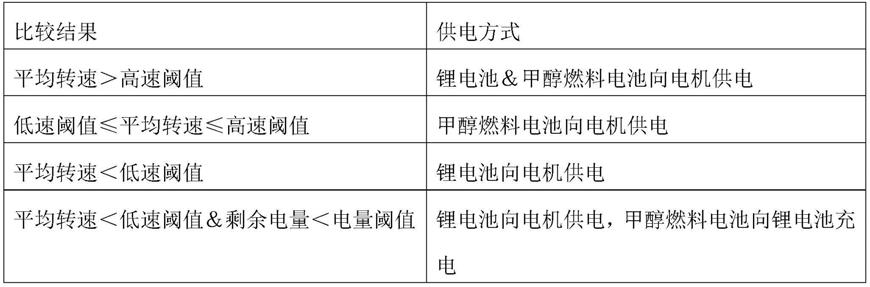
[0001]
本发明涉及无人机设备技术领域,具体为一种甲醇燃料电池无人机。
背景技术:
[0002]
无人机指的是利用无线电遥控设备和自备的程序控制装置操作的不载人飞机,在民用方面,无人机广泛被运用到航拍、农植保等领域。现有的民用无人机通常通过蓄电池提供能量,续航能力较差,通常在飞行数公里后就需要返航充电。尽管在采用了能量密度大的锂电池后,锂电池的容量得以提升,但是锂电池通常需要长时间充电,而且续航时间短,为了提高无人机的续航时间,就需要更大容量的锂电池。而随着锂电池容量的增加,锂电池的体积也会增加,无人机的体积增加,也就增大了无人机的负荷,增大了锂电池的功耗,最终导致无人机仍然不能进行长距离的飞行。
技术实现要素:
[0003]
本发明意在提供一种甲醇燃料电池无人机,以解决现有技术中,由于无人机采用锂电池供电而出现续航时间短的问题。
[0004]
本发明提供基础方案是:一种甲醇燃料电池无人机,包括无人机的本体,本体上设置有电源管理系统,电源管理系统包括电源模块,用于向本体的电机提供电能;
[0005]
电源模块包括用于向电机供电的锂电池以及向锂电池和/或电机供电的甲醇燃料电池;
[0006]
控制模块,用于控制电机的平均转速;
[0007]
存储模块,预存有高速阈值和低速阈值;
[0008]
比较模块,用于将平均转速与高速阈值和低速阈值进行比较,在平均转速高于高速阈值时,控制模块还用于控制锂电池以及甲醇燃料电池向电机供电,在平均转速不高于高速阈值并不低于低速阈值时,控制模块控制甲醇燃料电池向电机供电,在平均转速低于低速阈值时,控制模块控制锂电池向电机供电。
[0009]
基础方案的原理及有益效果是:与现有技术相比,1.本方案中,采用的甲醇燃料电池由于是采用甲醇作为燃料,因此具有燃料干净的特点,而且与锂电池相比,甲醇燃料电池的能量密度更低,也就意味着,同样的体积下,甲醇燃料电池的容量会更大,续航时间也就更长,从而提高了无人机的续航时间;
[0010]
2.本方案中,还利用控制模块对锂电池和甲醇燃料电池的供电进行管理,通过存储的高速阈值和低速阈值与控制模块的配合,实现对电机不同能耗需求下的供电,在满足电机能耗的同时减少了电能的浪费,达到了节约能源的目的。
[0011]
优选方案一:作为基础方案的优选,电源管理系统还包括检测模块,用于检测锂电池的剩余电量,存储模块预设有电量阈值,比较模块还用于比较剩余电量与电量阈值,在比较出剩余电量小于电量阈值时,控制模块控制甲醇燃料电池向锂电池充电。有益效果:本方案中,在检测到锂电池电量过低时,还利用甲醇燃料电量为锂电池进行供电,锂电池充电,
避免锂电池过度放电从而降低使用寿命的问题。
[0012]
优选方案二:作为优选方案一的优选,电量阈值为锂电池额定电量的20%。有益效果:本方案中,选择额定点亮的20%作为电量阈值,能够保证锂电池在电量耗尽前有充足时间进行充电。
[0013]
优选方案三:作为基础方案的优选,电源管理系统还包括有为甲醇燃料电池加热的预热件,当控制模块控制甲醇燃料电池工作时,控制模块还控制预热件启动。有益效果:考虑到甲醇燃料电池的工作温度是120℃,因此本方案中,还设置有预热件,在甲醇燃料电池工作时,利用设置的预热件对甲醇燃料电池进行加热,使得甲醇燃料电池能够快速达到工作温度,减少了甲醇燃料电池的预热时间,使得甲醇燃料电池可以快速正常供电。
[0014]
优选方案四:作为优选方案三的优选,电源管理系统还包括温度传感模块,用于检测并得到甲醇燃料电池的实时温度;存储模块预存有温度阈值,比较模块比较实时温度与温度阈值,在实时温度等于温度阈值时,控制模块控制预热件关闭。有益效果:本方案中,在甲醇燃料电池的温度达到温度阈值时,甲醇燃料电池已经能够正常发电,因此此时控制预热件关闭,从而降低了预热件的功耗。
[0015]
优选方案五:作为基础方案的优选,本体上设置有防腐蚀的存储甲醇的存储装置,用于向甲醇燃料电池通入甲醇。有益效果:由于甲醇具有腐蚀性,因此本方案中,还设置有具有防腐蚀的存储装置存储甲醇,保证了甲醇的正常存储。
[0016]
优选方案六:作为优选方案一的优选,在比较模块比较出剩余电量小于电量阈值且平均转速低于低速阈值时,控制模块控制甲醇燃料电池向锂电池充电。有益效果:本方案中,当比较出剩余电量小于电量阈值时,还比较平均转速是否小于低速阈值,当平均转速小于低速阈值时,是由锂电池向电机供电,此时甲醇燃料电池处于空闲状态,因此在这种情况下若检测到锂电池的剩余电量过低时,才利用甲醇燃料电池为锂电池供电,在保证电机正常运行的同时实现了锂电池的充电操作,操作简单。
[0017]
优选方案七:作为优选方案一的优选,检测模块还用于检测甲醇燃料电池的甲醇剩余量,存储模块预设有甲醇阈值,比较模块比较甲醇剩余量与甲醇阈值,在甲醇剩余量小于甲醇阈值且锂电池的剩余电量小于电量阈值时,控制模块还用于控制本体返航。有益效果:本方案中,在比较出甲醇剩余量小于甲醇阈值且锂电池的剩余电量小于电量阈值,表明此时电源模块的总电量濒临用尽,此时控制模块控制本体及时返航,从而保证了无人机可以顺利返航。
[0018]
优选方案八:作为基础方案的优选,存储模块内预存有飞行路径、快飞速度以及慢飞速度,控制模块控制本体根据飞行路径进行飞行,飞行路径包括基础路段和重要路段,在本体在基础路段飞行时,控制模块本体按照快飞速度进行飞行,在本体在重要路段飞行时,控制模块控制本体按照慢飞速度进行飞行。有益效果:考虑到在利用无人机对一些重要区域进行巡逻或喷洒农药等操作时,以巡逻为例,为了保证对重要区域的巡逻效果,本方案中,当无人机本体在重要路段飞行时,控制本体按照慢飞速度进行飞行,在慢飞过程中则可以对重要路段进行更全面更详细的巡逻,从而保证了巡逻效果。
[0019]
优选方案九:作为优选方案三的优选,预热件采用受控于控制模块的电热丝。有益效果:本方案中采用常见的电热丝作为预热件,易于获取,方便更换。
附图说明
[0020]
图1为本发明一种甲醇燃料电池无人机实施例一的示意图。
具体实施方式
[0021]
下面通过具体实施方式进一步详细说明:
[0022]
实施例一
[0023]
基本如附图1所示:一种甲醇燃料电池无人机,包括无人机的本体,本体上设置有电源管理系统,电源管理系统包括电源模块,用于向本体的电机提供电能;
[0024]
电源模块包括用于向电机供电的锂电池以及向锂电池和/或电机供电的甲醇燃料电池;
[0025]
检测模块,用于检测锂电池的剩余电量;
[0026]
控制模块,用于控制电机的平均转速;
[0027]
存储模块,预存有电量阈值、高速阈值和低速阈值,本方案中,电量阈值为锂电池额定电量的20%;
[0028]
比较模块,用于将平均转速与高速阈值和低速阈值进行比较,在平均转速高于高速阈值时,控制模块还用于控制锂电池以及甲醇燃料电池向电机供电,在平均转速不高于高速阈值并不低于低速阈值时,控制模块控制甲醇燃料电池向电机供电,在平均转速低于低速阈值时,控制模块控制锂电池向电机供电;比较剩余电量与电量阈值,在比较出剩余电量小于电量阈值且平均转速低于低速阈值时,控制模块控制甲醇燃料电池向锂电池充电,如表一所示。
[0029]
表一
[0030][0031]
本体上设置有防腐蚀的存储甲醇的存储装置,用于向甲醇燃料电池通入甲醇,本实施例中采用碳钢材质的存储罐对甲醇进行存储。
[0032]
检测模块还用于检测甲醇燃料电池的甲醇剩余量,存储模块预设有甲醇阈值,比较模块比较甲醇剩余量与甲醇阈值,在甲醇剩余量小于甲醇阈值且锂电池的剩余电量小于电量阈值时,控制模块还用于控制本体返航;本实施例中,采用检测甲醇燃料电池内甲醇液位的方式测得甲醇剩余量,在其他实施例中,还可以采用测量甲醇燃料电池重量的方式得到甲醇剩余量。
[0033]
具体实施过程如下:工作时,由控制模块控制本体的电机转动,无人机本体飞行。在飞行过程中,由包括甲醇燃料电池和锂电池的电源模块向电机供电,检测模块检测锂电池的剩余电量。具体的,在比较模块控制电机转动时,比较模块将电机的平均转速与存储模
块内预存的高速阈值和低速阈值进行比较,设定电机的平均转速为高速阈值为v
max
,低速阈值为v
min
,锂电池的剩余电量为u,电量阈值为u0,则电源模块的供电模式如表二。
[0034]
表二
[0035][0036]
其中,u0=0.2u。
[0037]
在飞行过程中,检测模块还检测甲醇燃料电池的甲醇剩余量。比较模块还比较甲醇剩余量和甲醇阈值,设定甲醇阈值为y0,测量出的甲醇剩余量为y,在甲醇剩余量y小于甲醇阈值,控制模块控制本体返航,即y<y0时,控制模块控制此时无人机本体开始往起点飞行,以保证无人机本体在电量耗尽前能够返回起点。
[0038]
实施例二
[0039]
与实施例一相比,本实施例中电源管理系统还包括有为甲醇燃料电池加热的预热件,当控制模块控制甲醇燃料电池工作时,控制模块还控制预热件启动;
[0040]
温度传感模块,用于检测并得到甲醇燃料电池的实时温度;存储模块预存有温度阈值,比较模块比较实时温度与温度阈值,在实时温度等于温度阈值时,控制模块控制预热件关闭具体的,本实施例中预热件采用电热丝。
[0041]
本实施例中,在甲醇燃料电池工作时,还利用预热件对甲醇燃料电池加热,使得甲醇燃料电池中的甲醇液体能够快速气化为甲醇气体,从而快速发电,以保证甲醇燃料电池的快速正常供电。
[0042]
实施例三
[0043]
与实施例一和实施例二不同之处在于,本实施中,存储模块内预存有飞行路径、快飞速度以及慢飞速度,控制模块控制本体根据飞行路径进行飞行,飞行路径包括基础路段和重要路段,在本体在基础路段飞行时,控制模块本体按照快飞速度进行飞行,在本体在重要路段飞行时,控制模块控制本体按照慢飞速度进行飞行。
[0044]
以油田巡逻为例,考虑到在飞行过程中,一些重要区域需要重点巡逻,如油井密布区域,因此本方案中,将巡逻的飞行路径划分为了基础路段和重要路段,当本体在重要路段飞行时,此时控制模块控制本体按照慢飞速度飞行,在慢飞的过程中,无人机本体则能够对飞行过的区域进行重点巡逻,而对于基础路段来说,并不需要额外的重点巡逻,因此控制模块控制本体按照快飞速度进行飞行,从而提高了无人机本体的巡逻效率。
[0045]
实施例四
[0046]
实施例四
[0047]
与实施例一至实施例三的不同之处在于,本实施例中,无人机的本体还搭载有采集模块,采集油田图像并获取到相应油田内的油井设备的工作数据;
[0048]
存储模块还存储油田图像对应的采集时间以及获取油井设备的工作数据的获取
时间;
[0049]
识别模块,用于对采集到的油田图像进行识别得到识别结果;本实施例中在对油田图像进行识别时,主要是对油田中油井设备的使用工况进行识别,本实施例中包括正在使用,停工或故障三种使用工况。
[0050]
比较模块还用于将相同时间的采集时间与获取时间对应的油田图像识别结果与油井设备的工作数据进行比较;
[0051]
报警模块,用于在比较出识别结果与工作数据不匹配时,发送示警信息。
[0052]
考虑到为了保证油田的正常工作,能够及时发现出现的问题,通常需要管理人员定时对油田进行巡检,而由于无人机本体的巡逻是由管理人员启动的,有时候可能会因为偷懒或延时的理由,导致无人机本体没有按时进行巡逻工作,也就意味着油田图像识别出的识别结果并不准确表示当时油田情况,如计划在下午四时对油田a进行巡逻,但是管理人员实际是在下午六点才操作无人机本体进行的巡逻,并将采集到的油田图像谎报为下午四时的油田图像进行存储,而又由于油井设备的工作数据的获取是由获取模块自动获取的,因此对于油井设备的工作数据来说,获取到的工作数据是能够准确表示油井设备当前时刻的工作状态的。因此本实施例中,还对油田图像对应的采集时间以及获取油井设备的工作数据的获取时间进行存储,比较模块将相同时间对应的油田图像识别结果与油井设备的工作数据进行比较,如将采集时间为下午四点的油田图像的识别结果与获取时间同样为下午四点的油井设备的工作数据进行比较,若比较出识别结果与工作数据不匹配时,则说明无人机本体可能并没有按时进行巡逻,到导致同一时刻里,油田图像的识别结果与油井设备的工作数据不匹配的情况,此时报警模块发送示警信息,以对管理人员进行示警,提醒管理人员需要按时操作无人机本体进行巡逻,以保证油田的正常工作。
[0053]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips