
 商标分类
商标分类  商标转让
商标转让 
用于运行车辆的方法和控制器与流程
 2021-02-03 14:02:56|
2021-02-03 14:02:56| 300|
300| 起点商标网
起点商标网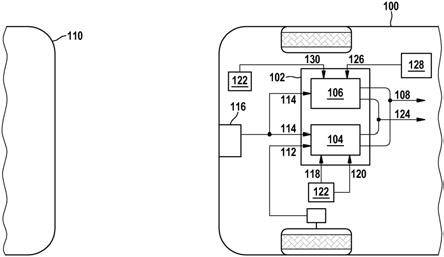
[0001]
本发明涉及一种用于运行车辆的方法和一种用于车辆的控制器。
背景技术:
[0002]
在具有距离调节巡航控制(abstandsregeltempomat)功能的车辆中,如此调节发动机功率,使得遵守设定的应有速度。附加地如此调节发动机功率,使得与前方行驶的车辆遵守与状况相关的应有距离。如果车辆的驾驶员通过操纵车辆的加速踏板克服距离调节巡航控制,则发动机功率相应于加速踏板的角度位置而提高。如果驾驶员踩下车辆的制动踏板,则距离调节巡航控制被停用。
技术实现要素:
[0003]
在此背景下,借助在此所提出的方案,提出根据独立权利要求的一种用于运行车辆的方法和一种用于车辆的控制器以及最后提出一种相应的计算机程序产品和一种机器可读的存储介质。在此所提出的方案的有利扩展方案和改进方案从说明书中得出并且在从属权利要求中进行描述。
[0004]
本发明的优点
[0005]
本发明的实施方式能够以有利的方式使得即使在逾越车辆的距离调节巡航控制的情况下也能够阻止与前方行驶的车辆发生碰撞。
[0006]
提出一种用于运行车辆的方法,该方法的特征在于,在距离调节巡航控制激活的情况下,响应于通过踩踏车辆的加速踏板所显示的加速愿望,切换到受加速踏板控制的距离调节器。
[0007]
本发明的实施方式的构思尤其可以视为基于下面所描述的想法和认识。
[0008]
距离调节巡航控制可以理解为车辆控制器中的调节器,该调节器根据车辆的当前速度并根据与前方行驶的车辆的当前距离来调节车辆的驱动装置的功率应有值。前方行驶的车辆可以称为其他车辆(fremdfahrzeug)。
[0009]
功率应有值由距离调节巡航控制来调节,直到当前速度达到所设定的应有速度。如果速度基本上相当于应有速度,则距离调节巡航控制如此调节功率应有值,使得速度保持在所设定的围绕应有速度的速度公差范围内。如果速度低于应有速度,则提高功率应有值。如果速度大于应有速度,则降低功率应有值。只要与前方行驶的车辆的当前距离大于预给定的、与速度相关的应有距离,速度就保持在速度公差范围内。如果距离基本上相当于应有距离,则由距离调节巡航控制调节功率应有值,从而距离保持在距离公差范围内。如果距离大于应有距离,则提高功率应有值。如果距离小于应有距离,则降低功率应有值。如果距离减小得比通过降低功率应有值所能补偿的更快,则激活车辆的制动系统,以便将距离再增大至应有距离。该距离可以通过与速度无关的时隙来表示,因为每单位时间所走过的路程取决于速度。
[0010]
通过车辆的加速踏板来检测车辆的驾驶员的加速愿望。在此,例如,如果加速踏板
的当前角度大于与当前通过距离调节巡航控制所设定的功率应有值相应的角度,则识别出加速踏板被踩踏。
[0011]
受加速踏板控制的距离调节器可以是控制器中的调节器。距离调节器根据当前距离将加速愿望转换为功率应有值。在此,根据当前距离将加速愿望的变化转换为功率应有值的变化。当前距离越接近距离目标值,功率应有值的变化就变得越小。如果其他车辆制动并且由此不能遵守距离目标值,则降低加速愿望,并且在需要时操控车辆的制动系统,以便也制动该车辆。同样地,在接近其他车辆时,在不改变加速愿望(加速愿望=0)的情况下可以降低功率应有值,以便遵守距离目标值。(例如:本车辆以150km/h的速度行驶或加速并以恒定的加速踏板角度接近以120km/h的速度行驶的车辆)。距离目标值可以低于应有距离。
[0012]
响应于加速愿望的终止,可以从受加速踏板控制的距离调节模式再切换回至使用距离调节巡航控制。由此,一旦驾驶员将脚从加速踏板移开,车辆就可以再以应有速度或相对于其他车辆的应有距离行驶。
[0013]
响应于通过操纵车辆的制动踏板进行的减速请求,可以切换到受加速踏板控制的距离调节器。由此,在制动过程之后继续监控距离,并且在距离朝向距离目标值减小或低于距离目标值时降低加速愿望,并且在需要时自动制动,以便保持最小距离。
[0014]
在受加速踏板控制的距离调节模式中,可以根据加速愿望来设定与前方行驶的车辆的距离目标值。距离目标值能够以时隙来设定。最小的距离目标值相当于最小的安全距离。加速愿望越大,距离目标值可以设定得越小。为了进行超车过程,可以设定与在高速公路上稳定跟车行驶相比更小的距离。
[0015]
该方法可以例如以软件或硬件或以软件和硬件的混合形式例如在控制器中实现。
[0016]
在此所提出的方案还提出一种用于车辆的控制器,该控制器构造为用于在相应的装置中执行、操控或实现在此所提出的方法的变型方案的步骤。
[0017]
该控制器可以是一种电设备,该电设备具有:用于处理信号或数据的至少一个计算单元,用于存储信号或数据的至少一个存储单元,以及用于读取或输出嵌入在通信协议中的数据的至少一个接口和/或通信接口。计算单元例如可以是用于处理传感器信号并且根据传感器信号输出数据信号的信号处理器、所谓的系统asic或微控制器。存储单元例如可以是闪存、eprom或磁性存储单元。接口可以构造为用于从传感器读取传感器信号的传感器接口,和/或构造为用于向执行器输出数据信号和/或控制信号的执行器接口。通信接口可以构造为用于以无线和/或有线方式读取或输出数据。接口也可以是软件模块,该软件模块例如与其他软件模块并列存在于微控制器上。
[0018]
也有利的是一种具有程序代码的计算机程序产品或计算机程序,该程序代码可以存储在机器可读的载体或存储介质如半导体存储器、硬盘存储器或光存储器上,并且尤其是当在计算机或设备上执行该程序产品或程序时用于执行、实现和/或操控根据上述实施方式之一的方法的步骤。
[0019]
要指出,在此参考不同的实施方式描述了本发明的一些可能的特征和优点。本领域技术人员知道,控制器和方法的特征能够以合适的方式组合、匹配或替换,以便获得本发明的其他实施方式。
附图说明
[0020]
以下参照附图描述本发明的实施方式,其中,附图和描述均不应解释为限制本发明。
[0021]
图1示出根据实施例的具有控制器的车辆的图示;
[0022]
图2a和2b示出根据实施例在使用距离调节巡航控制和受加速踏板控制的距离调节器的情况下在其他车辆后面的车辆的图示。
[0023]
这些附图仅是示意性的,而非按比例的。在附图中,相同的附图标记表示相同的或相同作用的特征。
具体实施方式
[0024]
当前,在车辆中有不同的驾驶员辅助功能。除其他功能外还有巡航控制(cruise control,crctl)、纵向限制器(longitudinal limiter,llim)、高级纵向限制器(advanced longitudinal limiter,allim)和距离调节巡航控制(adaptive cruise control,acc)为驾驶员提供提高的舒适性和更多的安全性。此外,其他辅助功能通过距离报警和紧急制动干预来提供安全性增益。
[0025]
在一些确定情况下,acc功能设计得会比某些驾驶员自身驾驶更加谨慎。在这些情况下,驾驶员能够在常规系统中通过加速踏板来请求比acc功能更多的力矩。但这导致常规的acc功能处于停用状态(override-status,超控状态),并且不对前方行驶的对象进行制动。例如,在高速公路上的超车操作中,通过踩踏加速踏板可能导致:不考虑要超越的车辆的制动并且因此本车辆不进行制动。
[0026]
在此处所提出的方案中,给现有的acc功能补充以碰撞保护(dynamic distance/drive assist,动态距离/驾驶辅助,dda),该碰撞保护具有动态地匹配驾驶员愿望的距离缓冲和/或速度缓冲。
[0027]
在此处所提出的方案中,在踩踏加速踏板的情况下使用dda功能。如此,驾驶员能够加速,但在要超越的车辆的制动过程中仍然通过遵守希望的距离而得到保护。在此,dda可以按照小的时间空档来设定,或者连续地使应有距离匹配于加速踏板愿望。后者导致:驾驶员在通过加速踏板希望加速时几乎不受限制/完全不受限制,但是在前方行驶的车辆的制动过程中被制动或者说被保护。
[0028]
图1示出根据实施例的具有控制器102的车辆100的图示。在控制器102中实现距离调节巡航控制104和距离调节器106。控制器102可以具有在此未描述的其他功能。
[0029]
距离调节巡航控制104是用于车辆100的功率应有值108的调节器。功率应有值108代表要由车辆100的驱动装置输出的功率。如果距离调节巡航控制104是激活的,则该距离调节巡航控制根据车辆100的当前速度以及该车辆与前方行驶的车辆110之间的当前距离来调节输出的功率。
[0030]
为此,距离调节巡航控制104读取速度值112和距离值114。速度值112代表当前速度。距离值114代表与前方行驶的车辆110的当前距离。该当前距离通过车辆100的距离传感器116来测量。
[0031]
距离调节巡航控制104还读取应有速度值118和应有距离值120。应有速度值118代表车辆的应有速度,并且由车辆100的驾驶员通过接口122设定。应有距离值120代表与前方
行驶的车辆的应有距离114。应有距离值120同样由驾驶员通过接口122设定或通过在此未示出的其他接口来设定。
[0032]
应有距离是与速度相关的。在速度较大的情况下应有距离比在速度较小的情况下大。因此,应有距离值120可以被作为与速度无关的时间空档读入。该时间空档描述直到车辆100驶过与前方行驶的车辆110先前相同的点为止的持续时间。
[0033]
当车辆100的速度低于应有速度时,距离调节巡航控制104提高功率应有值108。相反,如果速度大于应有速度,则降低功率应有值108。附加地,如果距离小于应有距离,则降低功率应有值108。由此速度下降。只要速度小于应有速度,如果距离大于应有距离,则提高功率应有值108。
[0034]
如果距离变得小于应有距离,例如因为前方行驶的车辆110进行制动,则距离调节巡航控制104输出用于车辆100的制动系统的制动应有值124,以便制动车辆100,直到距离再次与应有距离一致为止。
[0035]
距离调节器106同样是用于功率应有值108的调节器。如果距离调节器106是激活的,则该距离调节器根据距离和驾驶员的加速愿望调节输出的功率。加速愿望由车辆100的加速踏板128的加速踏板角度126代表。在使用距离的情况下将加速愿望转换为功率应有值108。
[0036]
为此,距离调节器106读取距离目标值130。距离目标值130代表由驾驶员在接口122或其他未示出的接口处预给定的最小距离。
[0037]
最小距离是与速度相关的。在速度较大的情况下最小距离比在速度较小的情况下大。因此,距离目标值130同样做为与速度无关的时间空档读入。最小距离可以小于应有距离。
[0038]
只要当前距离在最小距离之前的缓冲区域之外,则将加速愿望直接转换为功率应有值108。如果距离位于缓冲区域之内,则将加速愿望以降低的形式转换为功率应有值108。距离越接近最小距离,则越少地将加速愿望转换为功率应有值108。如果距离相当于最小距离,则距离调节器106如此调节功率应有值108,使得不低于最小距离。
[0039]
如果降低功率应有值108不足以达到距离目标值130,则距离调节器106输出用于车辆100的制动系统的制动应有值124,以便制动车辆100,直到距离再次与最小距离一致为止。
[0040]
在一个实施例中,驾驶员可以影响最小距离。如果驾驶员增大加速踏板角度126,从而该加速踏板角度位于阈值之上或/和以位于阈值之上的角速度改变,则与所设定的距离目标值130对应的时间空档变小。尤其是,时间空档逐步地变小。时间空档最小可以变得与系统的总响应时间一样小。
[0041]
如果驾驶员通过加速踏板128再发出降低加速愿望的信号,则时间空档再增大。
[0042]
在此处所提出的方案中,如果驾驶员通过加速踏板128设定一个加速愿望,该加速愿望相应于比当前由距离调节巡航控制104输出的功率应有值108更大的功率应有值108,则从距离调节巡航控制104切换到距离调节器106。如此,驾驶员可以逾越距离调节巡航控制104并且使车辆加速超过应有速度。然而,与前方行驶的车辆110的所需距离还继续被监控,并且在紧急情况下通过制动干预来保持所需距离。
[0043]
如果加速愿望再次相应于比当前由距离调节巡航控制104输出的功率应有值108
更低的功率应有值108,则再从距离调节器106切换到距离调节巡航控制104。
[0044]
在一个实施例中,当驾驶员操纵车辆100的制动踏板时,从距离调节巡航控制104切换到距离调节器106。由此,对与前方行驶的车辆110的距离的监控得以保留,并且,在低于所设定的距离目标值130时,在可能存在的紧急制动辅助实施硬制动干预之前车辆100已经柔和地制动。
[0045]
图2a和2b示出根据实施例在其他车辆110后面的车辆100在使用距离调节巡航控制和距离调节器的情况下的图示。如在图1中的那样,距离调节巡航控制和距离调节器在车辆100的控制器上实现。
[0046]
在图2a中,车辆在使用距离调节巡航控制的情况下以应有距离200在其他车辆110后面行驶。距离调节巡航控制通过对所提供的驱动功率的调节干预使车辆100的速度基本上匹配于该其他车辆的速度。在速度近似恒定的情况下,当前距离202在围绕应有距离200的公差范围内保持恒定。
[0047]
在图2b中,车辆100在使用距离调节器的情况下相对于其他车辆110具有较小距离202地行驶。驾驶员已经逾越距离调节巡航控制,其方式为,驾驶员踩下加速踏板并且使加速踏板偏转了比与当前由距离调节巡航控制所提供的功率应有值相应的加速踏板角度更大的加速踏板角度。随后,控制器已经从距离调节巡航控制切换到距离调节器。
[0048]
在距离调节运行中,加速踏板角度转换为功率应有值,直到距离202位于围绕距离目标值130的缓冲区域204内。在缓冲区域204内,加速踏板角度以越来越减弱的方式转换。换句话说,尽管加速踏板角度保持相同,但是功率应有值降低。
[0049]
如果距离202相当于距离目标值130,则将功率应有值降低到如此程度,使得车辆100保持与其他车辆110的距离目标值130。
[0050]
如果在这种情况下其他车辆110变慢或制动,则将功率应有值进一步降低并且根据需要激活车辆100的制动系统。
[0051]
如果所预选的距离目标值130对于驾驶员而言感觉与其他车辆110相距太远,则驾驶员可以通过加速踏板操纵来减小距离目标值130。在此,可以将距离目标值减小如此程度,使得车辆100相对于其他车辆110仅还保持与速度相关的安全距离206。
[0052]
最后要指出,诸如“具有”、“包括”等术语不排除其他元件或步骤,并且,诸如“一”或“一个”等术语不排除多个。权利要求中的附图标记不应视为限制。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips