
 商标分类
商标分类  商标转让
商标转让 
基于车载终端的辅助信息显示系统的制作方法
 2021-02-03 13:02:35|
2021-02-03 13:02:35| 289|
289| 起点商标网
起点商标网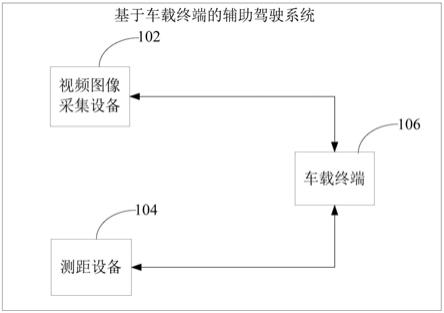
[0001]
本实用新型涉及车载终端技术领域,特别是涉及一种基于车载终端的辅助信息显示系统。
背景技术:
[0002]
在车辆行驶的过程中,经常会遇到在窄路、车流密集的车道等道路环境下行驶时,需要避免车辆与周围障碍物发生碰撞的情况下安全行驶,例如在小巷等窄路中行驶时,需要避免车辆与小巷两侧墙壁发生碰撞。
[0003]
然而,在这些道路环境行驶时,驾驶员通常难以判断车辆是否能在这些道路环境中安全通行,容易导致在窄路、车流密集的车道等道路环境下通行时使车辆与周围障碍物发生剐蹭。
技术实现要素:
[0004]
基于此,有必要针对传统技术容易导致车辆与周围障碍物发生剐蹭的问题,提供一种基于车载终端的辅助驾驶系统。
[0005]
一种基于车载终端的辅助信息显示系统,包括:
[0006]
视频图像采集设备、测距设备和当前车辆的车载终端;所述视频图像采集设备和所述测距设备分别与所述车载终端进行通信连接;其中,
[0007]
所述视频图像采集设备安装在所述当前车辆上,用于实时采集所述当前车辆的车身四周视频图像;所述车身四周视频图像携带车身四周障碍物的图像信息;
[0008]
所述测距设备安装在所述当前车辆的预设位置点上,用于测量所述预设位置点与所述车身四周障碍物的距离信息;
[0009]
所述车载终端接收所述车身四周视频图像和距离信息,将添加车辆前进标识的车身四周视频图像以及所述距离信息作为辅助信息,显示在所述车载终端的显示屏上。
[0010]
上述基于车载终端的辅助信息显示系统,通过使用安装在车辆上的视频图像采集设备采集当前车辆车身四周的视频图像,通过测距设备测量当前车辆预设位置点到车身四周障碍物的距离,并将采集到的数据发送至当前车辆的车载终端,使得车载终端将添加车辆前进标识的车身四周视频图像以及所述距离信息作为辅助信息显示在车载终端的显示屏上,该方案能够帮助驾驶员更好地判断能否通过窄路或者障碍物,协助驾驶员在障碍物道路中安全通行,避免车辆与周围障碍物发生剐蹭。
[0011]
在其中一个实施例中,所述视频图像采集设备为全景摄像头。
[0012]
在其中一个实施例中,所述视频图像采集设备的数量为四个,分别安装在所述当前车辆的前保险杠、左后视镜、右后视镜和后保险杠上。
[0013]
在其中一个实施例中,四个所述视频图像采集设备以螺接的形式安装在所述前保险杠、左后视镜、右后视镜和后保险杠上。
[0014]
在其中一个实施例中,所述测距设备为毫米波雷达。
[0015]
在其中一个实施例中,所述测距设备安装在所述当前车辆的前保险杠的预设位置点上。
[0016]
在其中一个实施例中,所述测距设备以卡接的形式安装在所述前保险杠的预设位置点上。
[0017]
在其中一个实施例中,所述测距设备的数量为两个;所述预设位置点的数量为两个。
[0018]
在其中一个实施例中,两个所述预设位置点对称分布在所述前保险杠上。
[0019]
在其中一个实施例中,还包括安装在所述当前车辆上的转向角传感器,用于将所述当前车辆的转向角信号发送至所述车载终端,以使所述车载终端添加与所述转向角信号相适应的车辆前进标识在所述车身四周视频图像上。
附图说明
[0020]
图1为一个实施例中基于车载终端的辅助信息显示系统的结构示意图;
[0021]
图2为一个实施例中前进标识的颜色变化示意图;
[0022]
图3为一个实施例中基于车载终端的辅助信息显示系统的视频图像采集设备安装结构示意图;
[0023]
图4为一个实施例中基于车载终端的辅助信息显示系统的测距设备安装结构示意图;
[0024]
图5为另一个实施例中基于车载终端的辅助信息显示系统的结构示意图。
具体实施方式
[0025]
为了使本实用新型的目的,方案及优点更加清楚明白,以下结合附图及实施实例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0026]
本实用新型实施例提供一种基于车载终端的辅助信息显示系统,以下分别对该系统的各组成部分及其连接关系进行详细说明。
[0027]
本实用新型提供的基于车载终端的辅助信息显示系统,其结构示意图如图1所示,图1为一个实施例中基于车载终端的辅助信息显示系统的结构示意图,辅助信息显示系统可以包括:视频图像采集设备102、测距设备104和当前车辆的车载终端106;视频图像采集设备102和测距设备104分别与车载终端106进行通信连接;其中,
[0028]
视频图像采集设备102安装在当前车辆上,用于实时采集当前车辆的车身四周视频图像;车身四周视频图像携带车身四周障碍物的图像信息;
[0029]
测距设备104安装在当前车辆的预设位置点上,用于测量预设位置点与车身四周障碍物的距离信息;
[0030]
车载终端106接收车身四周视频图像和距离信息,将添加车辆前进标识的车身四周视频图像以及距离信息作为辅助信息,显示在车载终端106的显示屏上。
[0031]
具体的,视频图像采集设备102为安装在当前车辆上的,可以采集视频图像信息的设备,用于实时采集当前车辆车身四周的视频图像,其安装的位置、方式以及数量都不作限定,视频图像里包括车身四周环境信息的图像以及车身四周障碍物的图像,视频图像采集
设备可以实时将这些信息传输至当前车辆的车载终端106。例如,携带有车身四周障碍物的图像信息的车身四周视频图像可以通过lvds(low-voltage differential signaling,低电压差分信号)的方式与车载终端106进行实时通信连接。车身四周的环境信息可以帮助驾驶员观察道路的具体情况,车身四周的障碍物图像可以用于提示驾驶员车身与障碍物之间的情况以使驾驶员更准确判断能否安全通过路段。
[0032]
测距设备104为安装在当前车辆上,可以测量距离的设备,用于测量当前车辆预设位置点到车身四周障碍物之间的距离。其中,预设位置点为设置在当前车辆上的用于测量该点与车身四周障碍物间距离的点,上述测距设备可以安装在该预设位置点上,以使测距设备在该预设位置点上测量其与车身四周障碍物之间的距离,该距离可以是该预设位置点到窄路两侧墙壁的距离;车身四周障碍物为当前车辆的车身周围的障碍物,该测距设备可以不断向外界发送探测信号,并接收周围物体的反射信号,确定当前车辆与车身四周障碍物之间的距离。测距设备可以通过can(controller area network,控制器局域网络)的方式与车载终端106连接,can信号的传输可以是周期性地传输至车载终端106,信号传输的时间间隔可以根据实际情况设定,例如该时间间隔可以被设置为50ms。
[0033]
车载终端106为安装在当前车辆上的主要用于接收并处理上述视频图像信息和当前车辆与车身四周障碍物距离的设备,其上可以设有显示屏。车载终端106可以分别接收发送自视频图像采集设备102的携带有车身四周障碍物图像的车身四周视频图像以及发送自测距设备104的车身预设位置点与车身四周障碍物之间的距离。车载终端106接收车身四周视频图像和距离后,可以将该视频图像和距离叠加显示,并在叠加后的画面上添加一个前进标识,该前进标识可以帮助驾驶员根据前进标识确定可以安全行驶的路线。
[0034]
在一个实施例中,如图2所示,图2为一个实施例中前进标识的颜色变化示意图,上述前进标识可以根据车身预设位置点与车身四周障碍物之间的距离的变化而改变颜色。
[0035]
具体地,可以将上述距离与预设的阈值进行比较,确定前进标识的颜色。该阈值可以设为第一阈值和第二阈值,若上述距离小于第一阈值,则确定该目标颜色为第一颜色y1;若该距离大于第一阈值,且小于或等于第二阈值,则确定该目标颜色为第二颜色y2;若该距离大于第二阈值,则确定该目标颜色为第三颜色y3;其中,第一颜色y1、第二颜色y2和第三颜色y3为不同的颜色。
[0036]
车载终端106可以将包含有前进标识的车身四周视频图像和距离信息作为辅助信息,传输到车载终端106上的显示屏进行显示。显示屏上可以显示上述视频图像信息、距离和前进标识中的一种或者多种的组合,需要说明的是,显示屏也可以显示除了上述信息以外的信息,比如播放电影等。驾驶员可以根据显示屏上显示的上述辅助信息,控制当前车辆更安全地通过障碍物路段,避免与障碍物剐蹭。
[0037]
在一个实施例中,上述视频图像采集设备为全景摄像头。
[0038]
全景摄像头为一种可以更加全面获取车身四周视频图像信息的摄像头设备,其可以是360度的全景摄像头,其工作原理通常为:车身四周的图像信息通过镜生成的光学图像投射到图像传感器表面上,然后转为电信号,经过模数转换转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,再传输到车载终端106中处理,通过显示屏就可以看到车身四周视频图像信息。相对于传统的摄像头,全景摄像头可以更加全面地采集车身四周视频图像信息,从而让驾驶员可以观察到更加丰富的辅助信息,帮助其更安全地通过障碍物
道路。
[0039]
在一个实施例中,请参考图3,图3为一个实施例中基于车载终端的辅助信息显示系统的视频图像采集设备安装结构示意图,上述视频图像采集设备的数量为四个,四个视频图像采集设备以螺接的形式分别安装在当前车辆的前保险杠204、左后视镜206、右后视镜208和后保险杠210上。如图3所示,四个视频图像采集设备分别为202a至202d,该视频图像采集设备可以分别安装在当前车辆的四个侧面。
[0040]
具体的,四个视频图像采集设备可以分别安装在当前车辆的前保险杠204中部、左后视镜206下方、右后视镜208下方和后保险杠210中部上,其安装方式可以是螺接的形式,采用螺接的形式可以方便视频图像采集设备的安装与拆卸更换。需要说明的是,上述视频图像采集设备202的数量和安装位置,是一种优选的实施方案,当摄像头数量为四个时,可以正好采集到当前车辆车身四个侧面区域的完整信息,使得车身四周视频图像更加完整;摄像头安装在当前车辆的上述位置时,可以更好地采集车身四周视频图像,以防止该视频图像缺漏。
[0041]
在一个实施例中,上述测距设备为毫米波雷达。
[0042]
毫米波雷达是工作在毫米波波段探测的雷达,毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点,使得当前车辆预设位置点与车身四周障碍物距离的测量更加准确。
[0043]
在一个实施例中,请参考图4,图4为一个实施例中基于车载终端的辅助信息显示系统的测距设备安装结构示意图,测距设备402以卡接的形式安装在前保险杠的预设位置点上。
[0044]
如图4所示,测距设备402以卡接的形式安装在预设位置点可以使得安装更加简便并且安装使用的成本更低,该卡接形式可以根据具体情况设计成一次性使用或者可多次使用的形式。测距设备402安装在前保险杠的预设位置点上,可以测量该点到车身四周障碍物的距离,主要用于测量车辆前方以及侧方到车身四周障碍物之间的距离,并传输到当前车辆的车载终端106的显示屏上显示相关辅助信息,以使驾驶员根据该距离判断前方道路是否能安全通过。
[0045]
在一个实施例中,测距设备402的数量为两个;上述预设位置点的数量为两个;两个预设位置点对称分布在前保险杠上。
[0046]
如图4所示,测距设备402分别为402a和402b,预设位置点分别为p1和p2,测距设备402a和402b可以分别安装在当前车辆的两个预设位置点p1和p2上。具体地,测距设备402a和402b可以以如左右对称等对称形式安装在当前车辆的前保险杠的两个预设位置点p1和p2上。需要说明的是,上述测距设备402的数量和安装位置,是一种优选的实施方案,当测距设备数量402为两个且安装在上述两个预设位置点时,可以更好地采集当前车辆的预设点到车身四周障碍物的距离。
[0047]
在一个实施例中,请参考图5,图5为另一个实施例中基于车载终端的辅助信息显示系统的结构示意图,上述基于车载终端的辅助信息显示系统,还包括安装在当前车辆上的转向角传感器508,用于将当前车辆的转向角信号发送至车载终端106,以使车载终端106添加与转向角信号相适应的车辆前进标识在车身四周视频图像上。
[0048]
转向角传感器508可以设置在当前车辆上,如可以将该转向角传感器508安装在当
前车辆的转向管柱下部,其可以通过can方式与车载终端106连接,该转向角传感器是508用于检测当前车辆的方向盘的转动角度和转向方向的一种器件。转向角传感器508可以获取为当前车辆车轮方向改变时发出的信号,即转向角信号。在一些实施例中,车载终端106需要根据转向角信号确定车辆前进标识的添加样式,例如,当车辆行驶到分岔路时,车载终端106不能直接确定驾驶员期望进入的路线,这时车载终端106可以根据转向角传感器508传输给车载终端106的转向角信号,确定驾驶员期望前往的路线,并在车身四周视频图像上添加相适应的车辆前进标识。通过本实施例的方案,车载终端106可以根据转向角信号,添加与转向角信号相适应的车辆前进标识在车身四周视频图像上,使得辅助信息显示更加清晰。
[0049]
上述基于车载终端的辅助信息显示系统,通过使用安装在车辆上的视频图像采集设备采集当前车辆车身四周的视频图像,通过测距设备测量当前车辆预设位置点到车身四周障碍物的距离,并将采集到的数据发送至当前车辆的车载终端106,使得车载终端106将添加车辆前进标识的车身四周视频图像以及距离信息作为辅助信息显示在车载终端106的显示屏上,该方案能够帮助驾驶员更好地判断能否通过窄路或者障碍物,协助驾驶员在障碍物道路中安全通行,避免车辆与周围障碍物发生剐蹭。
[0050]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0051]
以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 保险杠

 热门咨询
热门咨询




tips