
 商标分类
商标分类  商标转让
商标转让 
一种消防救援系留无人机位置转换装置的制作方法
 2021-02-03 13:02:45|
2021-02-03 13:02:45| 269|
269| 起点商标网
起点商标网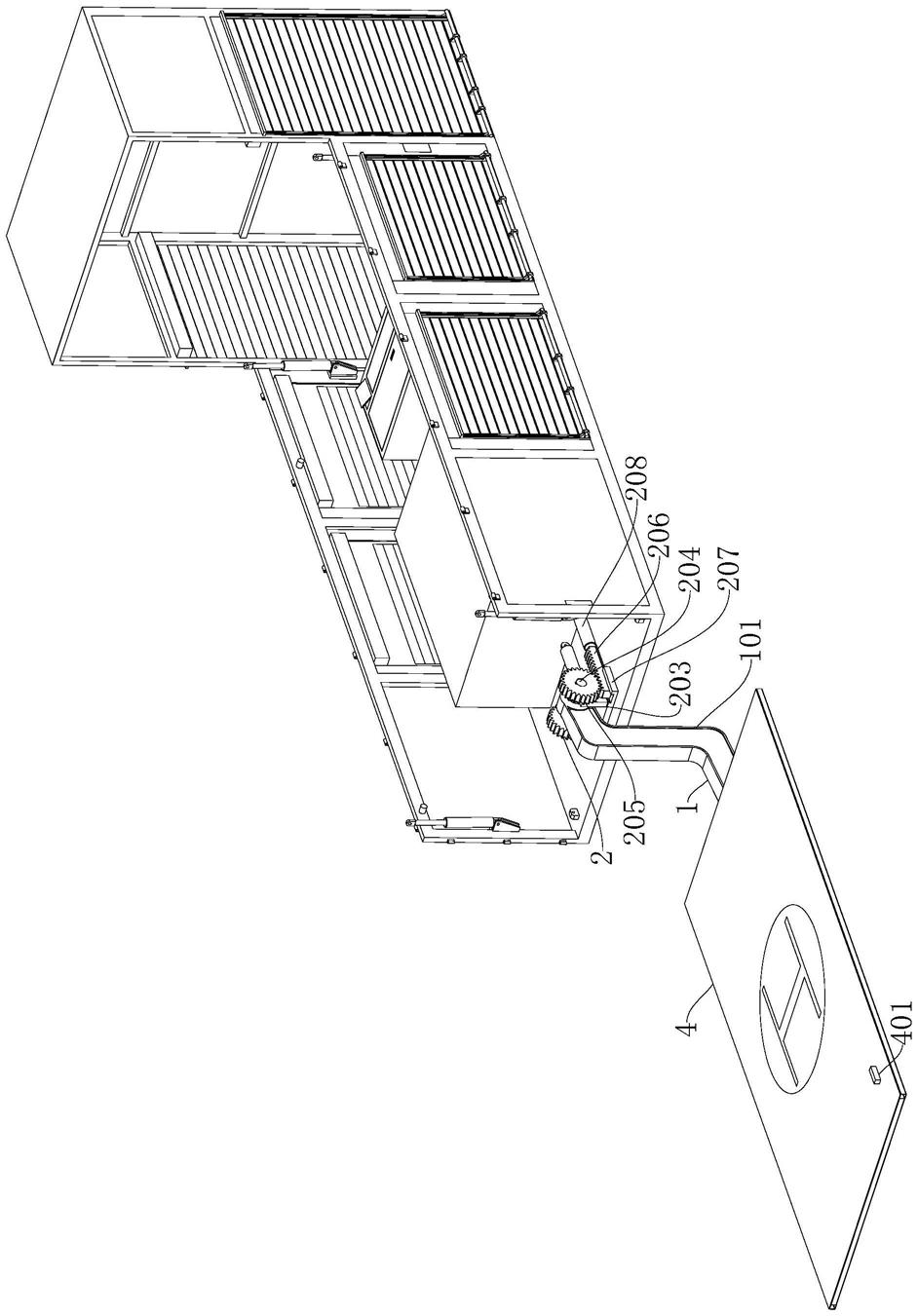
[0001]
本实用新型主要涉及消防技术领域,特指一种消防救援系留无人机位置转换装置。
背景技术:
[0002]
随着世界经济的发展,城市高层、超高层建筑日益增多,几十米甚至上百米的高楼一旦发生火灾,会面临消防上的难题。目前传统的高压水枪、消防云梯、高空无人机等消防设备均具有如下不足:
[0003]
(1)目前传统的高压水枪由于水压、消防云梯由于结构重量等原因均难以到达80米以上进行灭火和消防救援,而且目前的云梯消防车受地区、街道畅通程度、出警速度等限制,救火车在很多情况下不能第一时间赶到失火现场;而且使用消防车救火,主要还是依靠消防员,消防员直接靠近火场,有很高的危险性有时甚至会造成不必要的伤亡;
[0004]
(2)面对高层消防灭火,有时需要多台消防车进行联合作业,准备时间比较长,采用云梯进行高层的救援,其云梯展开有一个比较缓慢的过程,从而导致救援响应慢;
[0005]
(3)对于高空无人机,鉴于当前电池的性能参数,无人机携带灭火所需的载荷及自身重量,作业时间长度收到限制,携带灭火载荷少,空中作业时间短,需要多次往复空中和地面;如果携带载荷比较多,空中作业时间短,因此,使用电池供电的消防救援无人机不能长时间、较大载重的开展高层消防救援作业,延误消防救援的宝贵时机;
[0006]
(4)面对复杂的消防救援情形,传统消防方式难以满足破窗、大流量喷水、喷干粉、泡沫等多样化、可配置的消防灭火需求;
[0007]
(5)由于作业高度上的限制,传统消防手段难以对高层被困、急需救援的群众提供紧急救援器材(比如:防毒面具、灭火毯、强光手电、对讲机等);
[0008]
(6)现有消防无人机的单机作业完成喷干粉灭火、喷水等消防作业,没有充分构建消防救援系统的功能。
[0009]
目前有采用系留无人机进行消防灭火的技术,其中系留无人机在不工作时则位于消防车辆上,由于经常需要对系留无人机进行维修等作业,故需要将消防车辆上的系留无人机转移至地面或者拖车等运输车辆上,而目前则是通过人工或者吊装设备等来进行转移,其不仅转移效率低,而且操作不当极易造成系留无人机跌落等而造成损坏。
技术实现要素:
[0010]
本实用新型要解决的技术问题就在于:针对现有技术存在的技术问题,本实用新型提供一种结构简单、转换灵活且安全可靠的消防救援系留无人机位置转换装置。
[0011]
为解决上述技术问题,本实用新型提出的技术方案为:
[0012]
一种消防救援系留无人机位置转换装置,包括曲臂组件、第一转动机构、第二转动机构和用于供系留无人机起降的起落平台,所述曲臂组件的一端通过第一转动机构转动安装于系留无人机储存单元内,所述曲臂组件的另一端则通过第二转动机构与所述起落平台
转动相连;所述第一转动机构驱动所述曲臂组件在伸出状态与收回状态之间转动,所述第二转动机构驱动所述起落平台转动,以使起落平台在曲臂组件转动时处于水平状态。
[0013]
作为上述技术方案的进一步改进:
[0014]
所述曲臂组件包括第一曲臂和第二曲臂,所述第一曲臂的一端与所述第一转动机构相连,所述第一曲臂的另一端与所述第二曲臂的一端转动相连,所述第二曲臂的另一端与所述第二转动机构相连;所述第一曲臂与第二曲臂之间设置有伸缩件。
[0015]
所述伸缩件包括伸缩油缸或伸缩气缸或伸缩电缸。
[0016]
所述曲臂组件包括z型曲臂。
[0017]
所述第一转动机构包括第一摆动缸和第一连接板,所述第一摆动缸固定于所述系留无人机储存单元内,所述第一摆动缸的输出端通过第一连接板与所述曲臂组件的一端相连。
[0018]
所述第一摆动缸上设置有第一位置检测件,用于检测所述第一摆动缸的转动角度。
[0019]
所述第一转动机构包括转动座、转轴、齿轮、齿条、滑座和伸缩缸,所述转动座固定于所述系留无人机储存单元上,所述转轴紧固在所述曲臂组件上且转动安装于所述转动座上,所述齿轮安装于所述转轴的一侧或两侧,所述齿条滑动安装于所述滑座上且与所述齿轮啮合,所述伸缩缸的伸缩端与所述齿条的一端相连,用于驱动所述齿条在所述滑座上滑动。
[0020]
所述第二转动机构包括第二摆动缸和第二连接板,所述第二摆动缸固定于所述曲臂组件的另一端,所述第二摆动缸的输出端通过第二连接板与所述起落平台相连。
[0021]
所述第二摆动缸上设置有第二位置检测件,用于检测所述第二摆动缸的转动角度。
[0022]
还包括用于检测所述起落平台与水平面倾角的倾角传感器,所述第二摆动缸与所述倾角传感器相连,用于根据检测的倾角值调整转动方向以及角度。
[0023]
与现有技术相比,本实用新型的优点在于:
[0024]
本实用新型的消防救援系留无人机位置转换装置,通过第一转动机构与第二转动机构的配合,使得起落平台与曲臂组件之间形成联动,进而实现起落平台上的系留无人机在集装箱(或消防车辆的车厢等)与地面位置之间的切换,便于系留无人机的装箱、地面维修以及转运等工作,同时在切换的过程中能够保证起落平台始终处于水平状态,从而保证系留无人机在起落平台上的安全稳定性;上述整体结构简单、位置转换灵活且安全可靠。
[0025]
本实用新型的消防救援系留无人机位置转换装置,将曲臂组件设置成多段且中间增设伸缩件,通过伸缩件的伸缩使得各曲臂之间的位置发生变化,实现系留无人机在不同位置之间的自动切换,如装箱位置(集装箱位于车辆上或者地面上)与地面、装箱位置与拖车位置(拖车位置高于地面)、或者地面与拖车位置之间的切换等等,从而实现系留无人机装箱、地面维修、拖车转运等工作之间的无缝对接;上述结构简单、操作简便且易于实现。
附图说明
[0026]
图1为本实用新型的装置在实施例一中的立体结构图之一。
[0027]
图2为本实用新型的装置在实施例一中的立体结构图之二。
[0028]
图3为本实用新型的装置在实施例二中位置a的主视结构图。
[0029]
图4为本实用新型的装置在实施例二中位置a的立体结构图。
[0030]
图5为本实用新型的装置在实施例二中位置b的主视结构图。
[0031]
图6为本实用新型的装置在实施例二中位置b的侧视结构图。
[0032]
图7为本实用新型的装置在实施例二中位置b的立体结构图。
[0033]
图8为本实用新型的装置在实施例二中位置c的立体结构图之一。
[0034]
图9为本实用新型的装置在实施例二中位置c的立体结构图之二。
[0035]
图中标号表示:1、曲臂组件;101、z型曲臂;102、第一曲臂;103、第二曲臂;2、第一转动机构;201、第一摆动缸;202、第一连接板;203、转动座;204、转轴;205、齿轮;206、齿条;207、滑座;208、伸缩缸;3、第二转动机构;301、第二摆动缸;302、第二连接板;4、起落平台;401、倾角传感器;5、伸缩件。
具体实施方式
[0036]
以下结合说明书附图和具体实施例对本实用新型作进一步描述。
[0037]
实施例一:
[0038]
如图1和图2所示,本实施例的消防救援系留无人机位置转换装置,包括曲臂组件1、第一转动机构2、第二转动机构3和用于供系留无人机起降的起落平台4,曲臂组件1的一端通过第一转动机构2转动安装于系留无人机储存单元(如消防车辆的车厢、集装箱等)内,曲臂组件1的另一端则通过第二转动机构3与起落平台4转动相连;第一转动机构2驱动曲臂组件1在伸出状态与收回状态之间转动,第二转动机构3驱动起落平台4转动,以使起落平台4在曲臂组件1转动时处于水平状态。具体地,曲臂组件1包括z型曲臂101,其中z型曲臂101处于伸出状态时,此时的起落平台4处于地面或拖车等位置处;在z型曲臂101处于收回状态时,此时的起落平台4则位于集装箱或消防车辆的车厢内部(装箱状态);通过上述第一转动机构2与第二转动机构3的配合,使得起落平台4与曲臂组件1之间形成联动,进而实现起落平台4上的系留无人机在集装箱(或消防车辆的车厢等)与地面位置或拖车位置之间的切换,便于系留无人机的装箱、地面维修转运等工作,同时在切换的过程中能够保证起落平台4始终处于水平状态,从而保证系留无人机在起落平台4上的安全稳定性。当然,系留无人机是通过相应的紧固组件紧固在起落平台4上的,其对应的紧固组件可以采用液压推杆等固定架来固定住系留无人机的固定起落架。上述整体结构简单、操作简便且易于实现。
[0039]
如图1和图2所示,本实施例中,第一转动机构2包括转动座203、转轴204、齿轮205、齿条206、滑座207和伸缩缸208,转动座203固定于集装箱内,转轴204穿过并紧固在z型曲臂101上,其中转轴204转动安装于转动座203上,两个齿轮205则固定安装于转轴204的两侧,齿条206的底面滑动安装于滑座207上,齿条206的顶面则与齿轮205啮合,伸缩缸208的伸缩端与齿条206的一端相连,用于驱动齿条206在滑座207上滑动,通过齿条206的直线运动,带动齿轮205转动,从而使得转轴204转动,带动z型曲臂101转动,从而实现z型曲臂101在伸出状态与收回状态之间转动。上述第一转动机构2的结构简单、操作简便可靠。
[0040]
如图2所示,本实施例中,第二转动机构3包括第二摆动缸301(如螺旋液压摆动缸)和第二连接板302,第二摆动缸301固定于曲臂组件1的另一端,第二摆动缸301的输出端通过第二连接板302与起落平台4相连。其中,第二摆动缸301上设置有第二位置检测件(如位
置传感器,图中未示出),用于检测第二摆动缸301的转动角度,实现转动角度的监测;同时在起落平台4上还设有倾角传感器401,用于检测起落平台4与水平面之间的倾角。在z型曲臂101在摆动的过程中,此时起落平台4与水平面之间的倾角也会发生变化,通过检测起落平台4与水平面倾角的倾角值,在倾角值超过一定范围(如
±
5度),控制对应第二摆动缸301在相应反应摆动对应角度,从而使得起落平台4在z型曲臂101摆动的过程中始终处于水平状态,保证起落平台4上系留无人机的安全性。
[0041]
实施例二:
[0042]
如图3至图9所示,本实施例与实施例一的区别在于:第一转动机构2也可以采用第二转动机构3相同的结构,具体包括第一摆动缸201(如螺旋液压摆动缸)和第一连接板202,第一摆动缸201固定于集装箱内,其中第一摆动缸201的的摆动端则通过第一连接板202与z型曲臂101的一端相连。在进行摆动时,第一摆动缸201摆动,带动第一连接板202上的z型曲臂101在伸出状态与收回状态之间转动。另外,在第一摆动缸201上设置有第一位置检测件(如位置传感器,图中未示出),用于检测第一摆动缸201的转动角度,实现转动角度的监测,保障转动的安全可靠性。
[0043]
本实施例中,曲臂组件1则由多段曲臂构成,具体包括第一曲臂102和第二曲臂103,第一曲臂102的一端与第一转动机构2相连,第一曲臂102的另一端与第二曲臂103的一端转动相连,第二曲臂103的另一端与第二转动机构3相连;第一曲臂102与第二曲臂103之间设置有伸缩件5。其中伸缩件5可以采用伸缩油缸或伸缩气缸或伸缩电缸等伸缩机构。具体地,上述曲臂组件1设置多段且中间增设伸缩件5的结构,能够适用于不同位置之间的切换,如实施例一中装箱位置与地面之间的切换,也可以实现装箱位置与拖车位置(拖车位置高于地面),如在拖车位置时,可以通过伸缩件5的伸长使得第二曲臂103向前伸出,以适应拖车位置而便于对起落平台4上的系留无人机进行转运等处理。其它未述内容与实施例一相同,在此不再赘述。
[0044]
本实施例中,第二摆动缸301的摆动也可以依据第一摆动缸201的转动角度来进行调节。由于z型曲臂101在进行转动时,通过z型曲臂101的转动角度,再通过已知的z型曲臂101的弯折角度,从而可以得到起落平台4与水平面的倾角角度,故通过第一位置检测件检测的第一摆动缸201的转动角度,则可得到起落平台4的倾角值,从而可以实现对第二摆动缸301的转动调整,即第二摆动缸301的转动依据第一摆动缸201的转动角度来进行。
[0045]
如图3和图4所示,起落平台4和系留无人机处于位置a处,即地面位置,便于进行维修、搬运等操作;当需要进行位置切换时,先运行至位置b处,如图5-7所示,此时起落平台4处于水平状态;再进一步地,起落平台4和系留无人机位于位置c处,即装箱位置,如图8和图9所示。当然,上述位置切换装置是处于车辆上的,如果处于地面时,需要将起落平台4和系留无人机转移至地面时,则需要伸长伸缩件5以实现位置调整,如果起落平台4与曲臂组件1之间存在干涉,则可以通过调节第二转动机构3,以使起落平台4适当倾斜而不与曲臂组件1之间干涉。在其它不同位置之间进行切换时,依据上述转换原理进行。
[0046]
本实用新型的消防救援系留无人机位置转换装置,将曲臂组件1设置成多段且中间增设伸缩件5,通过伸缩件5的伸缩使得各曲臂之间的位置发生变化,实现系留无人机在不同位置之间的自动切换,如装箱位置(集装箱位于车辆或者地面上)与地面、装箱位置与拖车位置(拖车位置高于地面)、或者地面与拖车位置之间的切换等等,从而实现系留无人
机装箱、地面维修、拖车转运等工作之间的无缝对接;上述结构简单、操作简便且易于实现。
[0047]
以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips