
 商标分类
商标分类  商标转让
商标转让 
数据一分二转换电路、系统及无人驾驶车辆的制作方法
 2021-02-03 13:02:37|
2021-02-03 13:02:37| 256|
256| 起点商标网
起点商标网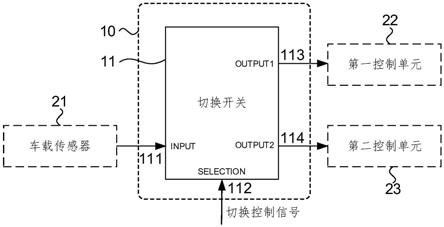
[0001]
本公开涉及电子技术领域,尤其涉及一种数据一分二转换电路、系统及无人驾驶车辆。
背景技术:
[0002]
随着车辆智能化技术的发展,无人驾驶技术逐渐成为车辆自动控制领域的一个热点。无人驾驶车辆也可称为轮式移动机器人,其主要依靠车内的计算机系统为主的智能驾驶系统来实现无人驾驶。无人驾驶车辆利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而时车辆能够安全、可靠地在道路上行驶。
[0003]
现有技术中,随着无人驾驶车辆中的行车电脑,也称为电子控制单元(electrical control unit,ecu)的数量的增加,对车载传感器有数据需求的ecu越来越多。如果将各ecu对应的车载传感器分别单独安装,则会造成车身周边布满车载传感器,使得车载传感器的安装以及相关布线的难度较大。
技术实现要素:
[0004]
为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了一种数据一分二转换电路、系统及无人驾驶车辆。
[0005]
本公开实施例的第一方面提供了一种数据一分二转换电路,包括:
[0006]
切换开关,包括输入端、切换控制信号端、第一输出端和第二输出端;
[0007]
所述输入端与车载传感器连接,用于接收车载传感器的传感信号;
[0008]
所述切换控制信号端基于切换控制信号,分时选择第一输出端或第二输出端进行输出;
[0009]
所述第一输出端与第一控制单元连接;
[0010]
所述第二输出端与第二控制单元连接;
[0011]
其中,所述切换开关的信号传输速率等于或大于所述车载传感器发送所述传感信号的速率。
[0012]
在一些实施例中,所述切换开关还包括电源端;
[0013]
所述电源端连接电压转换器,所述电压转换器的输入端有电压输入。
[0014]
在一些实施例中,所述电压转换器为低压差线性稳压器。
[0015]
在一些实施例中,该数据一分二转换电路还包括第一电感网络和第一电容隔直网络;
[0016]
所述第一电感网络的第一端与所述电压转换器的输入端连接,所述第一电感网络的第二端和所述第一电容隔直网络的第一端均通过第一同轴线缆与所述车载传感器连接;
[0017]
所述第一电容隔直网络的第二端连接所述切换开关的输入端,所述电压转换器的输出端连接所述切换开关的电源端。
[0018]
在一些实施例中,该数据一分二转换电路还包括第二电容隔直网络和第三电容隔直网络;
[0019]
所述第二电容隔直网络的第一端与所述第一控制单元连接,第二端与所述第一输出端连接;
[0020]
所述第三电容隔直网络的第一端与所述第二控制单元连接,第二端与所述第二输出端连接。
[0021]
在一些实施例中,所述切换控制信号端连接所述第一控制单元和所第二控制单元,以接收来自所述第一控制单元或所述第二控制单元的切换控制信号;所述电压来自外部电源。
[0022]
在一些实施例中,该数据一分二转换电路还包括第二电感网络和第三电感网络;
[0023]
所述第二电感网络的第一端和所述第二电容隔直网络的第一端均通过第二同轴线缆与所述第一控制单元连接,所述第二电感网络的第二端连接所述电压转换器的输入端及所述第一电感网络的第一端;
[0024]
所述第三电感网络的第一端和所述第三电容隔直网络的第一端均通过第三同轴线缆与所述第二控制单元连接,所述第三电感网络的第二端连接所述切换开关的切换控制信号端。
[0025]
在一些实施例中,所述切换开关的输入端、第一输出端和第二输出端传输的所述传感信号均为差分信号。
[0026]
在一些实施例中,所述切换开关的信号传输速率等于或者大于1.4gbps。
[0027]
本公开实施例的第二方面提供了一种数据一分二转换系统,包括:
[0028]
转换电路,采用上述任一种数据一分二转换电路;
[0029]
车载传感器,连接至所述切换开关的输入端;
[0030]
第一控制单元,连接至所述切换开关的第一输出端;
[0031]
第二控制单元,连接至所述切换开关的第二输出端;
[0032]
其中,所述切换开关在所述切换控制信号的控制下,分时输出所述传感信号至所述第一控制单元或所述第二控制单元。
[0033]
在一些实施例中,所述车载传感器为摄像头。
[0034]
在一些实施例中,所述切换开关的数量为n个,所述摄像头的数量为m个,m和n均为正整数,且m≥n;
[0035]
所述第一控制单元包括m个传感信号接收端,所述第二控制单元包括n个传感信号接收端;
[0036]
其中,n个所述摄像头的传感信号分时传输至所述第一控制单元和所述第二控制单元,剩余m-n个所述摄像头的传感信号仅传输至所述第一控制单元。
[0037]
在一些实施例中,所述第一控制单元为无人驾驶控制器,所述第二控制单元为adas控制器;
[0038]
在一些实施例中,所述无人驾驶控制器的级别为l3级、l4级或l4级以上的级别,所述adas控制器的级别为l1级或l2级。
[0039]
本公开实施例的第三方面提供了一种无人驾驶车辆,包括上述任一种数据一分二转换系统。
[0040]
本公开实施例提供的技术方案与现有技术相比具有如下优点:
[0041]
本公开实施例提供的数据一分二转换电路包括切换开关,其输入端、第一输出端和第二输出端分别连接车载传感器、第一控制单元和第二控制单元,其切换控制信号端接收切换控制信号;同时该切换开关的信号传输速率等于或大于车载传感器发送传感信号的速率,由此该切换开关可实现高速信号的切换输出,其可在切换控制信号的控制下将车载传感器的传感信号分时传输至第一控制单元和第二控制单元,从而该单个车载传感器的传感信号可由切换开关控制分时被两个控制单元利用,即实现两个控制器采用分时的方式利用车载传感器的传感信号,如此可实现车载传感器的传感信号在两个控制单元之间的共享,从而可减少车载传感器的数量,有利于降低车载传感器的安装以及相关布线的难度。
附图说明
[0042]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
[0043]
为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0044]
图1为现有技术中,无人驾驶车辆的摄像头数据传输方式示意图;
[0045]
图2为本公开实施例的一种数据一分二转换电路的结构示意图;
[0046]
图3为本公开实施例的另一种数据一分二转换电路的结构示意图;
[0047]
图4为本公开实施例的又一种数据一分二转换电路的结构示意图;
[0048]
图5为本公开实施例的又一种数据一分二转换电路的结构示意图;
[0049]
图6为本公开实施例的又一种数据一分二转换电路的结构示意图;
[0050]
图7为本公开实施例所示的数据一分二转换电路中电容隔离网络和电感网络的结构示意图;
[0051]
图8为本公开实施例的一种数据一分二转换系统的结构示意图;
[0052]
图9为本公开实施例的另一种数据一分二转换系统的结构示意图;
[0053]
图10为本公开实施例的又一种数据一分二转换系统的结构示意图;
[0054]
图11为本公开实施例的又一种数据一分二转换系统的结构示意图;
[0055]
图12为本公开实施例的又一种数据一分二转换系统的结构示意图。
具体实施方式
[0056]
为了能够更清楚地理解本公开的上述目的、特征和优点,下面将对本公开的方案进行进一步描述。需要说明的是,在不冲突的情况下,本公开的实施例及实施例中的特征可以相互组合。
[0057]
在下面的描述中阐述了很多具体细节以便于充分理解本公开,但本公开还可以采用其他不同于在此描述的方式来实施;显然,说明书中的实施例只是本公开的一部分实施例,而不是全部的实施例。
[0058]
鉴于现有技术中,两个不同的控制单元(即控制器)对相同车载传感器的传感信号都有输入需求,而不同的控制器的传感信号输入需求可在时间上间隔开,因此本公开实施
例提供一种数据一分二转换电路,以将单个车载传感器的传感信号分时输出至两个控制器,从而实现了车载传感器的传感信号在两个控制器之间共享;同时,电路结构较简单,布设难度较低,且便于实车集成应用。
[0059]
具体地:无人驾驶车辆的车载传感器包括雷达和图像传感器,雷达可包括激光雷达、超声波雷达以及毫米波雷达,图像传感器可为摄像头。以车载传感器为摄像头为例,其数据传输方式通常采用如图1所示的数据传输方式。
[0060]
图1中,摄像头采集到的信号在摄像头内部经过转换之后,输出高速串行信号,例如相机的互补式金属氧化物半导体(complementary metal-oxide-semiconductor,cmos)阵列采集数据,该采集到的数据经过图像信号处理(image signal processing,即isp处理)后,再经过编码器编码,转为高速串行信号;该高速串行信号经线缆传输至车载控制器,在车载控制器中经解码器解码,后可传输至系统芯片(system on chip,soc)进行数据处理,以实现对摄像头视场范围内的车身周边环境的探测。
[0061]
随着无人驾驶车辆的电子控制单元(又称“行车电脑”、“车载电脑”、“控制器”)数量的增加,对车载摄像头的数据具有输入要求的控制器的数量随之增加。例如,l2级别的高级驾驶辅助系统(advanced driving assistant system,adas)控制器需要摄像头的数据以实现360度环视功能,其需要环绕车身的至少4颗摄像头;而l4级别的无人驾驶控制器需要摄像头的数据以实现无人驾驶的视觉同步定位和建图(visual simultaneous localization and mapping,vslam)、行人检测(object detection,od)以及多目标追踪(multiple object tracking,mot)的功能,其需要环绕车身的至少6颗摄像头。
[0062]
现有技术中,上述adas控制器需要的摄像头和无人驾驶控制器需要的摄像头分别单独安装,会造成车身周边的摄像头数量较多,需要较多的安装空间,使得摄像头安装以及车身布线难度较大;同时,由于摄像头数量较多且布线较多,导致无人驾驶车辆的成本较高。
[0063]
针对上述问题,本公开实施例提出利用切换开关实现车载控制器的数据共享的方案,以减少摄像头的数量,降低车身布线难度。车载控制器包括但不限于摄像头。
[0064]
具体地:针对两种控制器不需要同时使用摄像头的数据的场景。例如:无人驾驶车辆未行驶时刻,需要实现360度环视,此时摄像头的数据提供给l2级别的adas控制器;而在无人驾驶车辆的行驶过程中,摄像头的数据不需要提供给adas控制器,而是提供给l4级别的无人驾驶控制器,以支持无人驾驶功能。从而实现两个控制器采用分时的方式利用摄像头采集的数据,即实现摄像头的数据的分时共享。
[0065]
下面结合图2-图12,对本公开实施例提供的数据一分二转换电路和系统进行示例性说明。
[0066]
图2为本公开实施例的一种数据一分二转换电路的结构示意图。参照图2,该数据一分二转换电路10可包括:切换开关11,包括输入端111、切换控制信号端112、第一输出端113和第二输出端114;输入端111与车载传感器21连接,用于接收车载传感器21的传感信号;切换控制信号端112基于切换控制信号,分时选择第一输出端113或第二输出端114进行输出;第一输出端113与第一控制单元22连接;第二输出端114与第二控制单元23连接;其中,切换开关11的信号传输速率等于或大于车载传感器发送传感信号的速率。
[0067]
其中,切换开关11的输入端111接收来自车载传感器21的传感数据(即传感信号),
并基于切换控制信号端112接收的切换控制信号,分时选择第一输出端113或第二输出端114输出传感数据,即切换开关11基于切换控制信号端112接收到切换控制信号分时向第一控制单元22和第二控制单元23传输传感数据,从而实现车载传感器21的传感数据在第一控制单元22和第二控制单元23之间的分时共享。基于此,在第一控制单元22和第二控制单元23均具有传感信号输入需求时,可使第一控制单元22和第二控制单元23共享该车载传感器21的传感信号,而无需为第一控制单元22和第二控制单元23单独设置各自的车载传感器21,从而可减少车载传感器21的数量,有利于降低车载传感器21所占用的布设空间,降低车载传感器21的安装难度;有利于降低车载传感器21的相关布线的布设难度。
[0068]
示例性地,切换控制信号可为包括第一电平和第二电平的脉冲信号;当切换控制信号为第一电平时,传感信号由第一输出端113输出,即传感信号传输至第一控制单元22;当切换控制信号为第二电平时,传感信号由第二输出端114输出,即传感信号传输至第二控制单元23。基于切换控制信号中第一电平和第二电平的切换,可实现传感信号分时输出至第一控制单元22和第二控制单元23。
[0069]
示例性地,第一电平信号可为高电平信号,第二电平信号可为低电平信号;或者第一电平信号为低电平信号,第二电平信号为高电平信号,本公开实施例对此不限定,下文中示例性地详述。
[0070]
此外,该切换开关11的信号传输速率大于或者等于车载传感器21发送传感信号的速率,可称为高速切换开关,支持传感信号对应的高速信号的一分二输出,从而满足传感信号的一分二转换。
[0071]
示例性地,以车载传感器21为摄像头为例,摄像头发送至切换开关11的高速串行信号数据率和摄像头的分辨率以及其相关配置参数相关,该高速串行信号的数据率(即车载传感器21发送传感信号的速率)通常在1gbps和2gbps之间。基于此,通过设置切换开关21的信号传输速率等于或大于2gbps,可满足摄像头的传输速率需求,同时实现其传感信号的一分二转换。
[0072]
示例性地,摄像头发送传感信号的速率为1.4gbps时,切换开关11可采用usb3.0切换开关,其信号传输速率为5gbps,满足信号传输需求;或者,切换开关11可采用具有一分二转换功能,且信号传输速率等于或者大于1.4gbps的其他切换开关,本公开实施例对此不限定。
[0073]
需要说明的是,本实施例仅示例性地以车载传感器21为摄像头为例,示例性地说明了切换开关11的信号传输速率在车载传感器发送传感信号的速率以上时,可满足传感信号传输和一分二转换的需求。
[0074]
在其他实施方式中,当车载传感器21的传感信号的传输速率为其他数值时,切换开关的信号传输速率可随之设置,例如可为3gbps、5gbps、8gbps或其他满足传感信号的传输需求的数值,可根据数据一分二转换电路和车载传感器的需求设置,本公开实施例对此不限定。
[0075]
本公开实施例提供的数据一分二转换电路10,通过设置切换开关11的输入端111连接车载传感器,第一输出端113连接第一控制单元22,第二输出端114连接第二控制单元23,切换控制信号端112基于切换控制信号,分时选择第一输出端113和第二输出端114进行输出,可实现车载传感器21的传感信号分时输出至第一控制单元22和第二控制单元23,从
而实现第一控制单元22和第二控制单元23分时共享车载传感器21的传感信号,可无需为第一控制单元22和第二控制单元23设置各自独立的车载传感器21,从而有利于减少车载传感器21的数量,降低车载传感器21的安装难度,以及降低其相关走线的布线难度。此外,通过设置切换开关11的信号传输速率满足车载传感器21的信号传输速率需求,有利于避免传感信号失真,即传感信号的稳定性和鲁棒性较高,质量较好;将其应用于无人驾驶车辆时,有利于实现对车身周围环境的准确探测。
[0076]
在上述实施方式的基础上,为实现切换开关11正常工作,还需要为切换开关11供电。下面结合图3进行示例性说明。
[0077]
在一些实施例中,图3为本公开实施例的另一种数据一分二转换电路的结构示意图。参照图3,该切换开关11还包括电源端115;电源端115连接电压转换器12,电压转换器12的输入端121有电压输入。
[0078]
其中,电压转换器12的输入端121接入电源电压,其输出端122连接切换开关11的电源端115,用于电源电压转换成适合切换开关11利用的电压,从而实现为切换开关11供电,以确保切换开关11上电工作。
[0079]
示例性地,电压转换器12的实际产品形式包括但不限于电压转换电路和电压转换芯片;电压转换器12可为升压型电压转换器、降压型电压转换器或升降压型电压转换器,可根据电源电压与切换开关11的工作电压的设置,本公开实施例对此不限定。
[0080]
在一些实施例中,电压转换器12可为低压差线性稳压器(low dropout regulator,ldo)。
[0081]
其中,低压差线性稳压器是一个自耗很低的微型片上系统,集成了具有极低线上导通电阻的mosfet、肖特基二极管、取样电阻和分压电阻等硬件电路,具有过流保护、过温保护、精密基准源、差分放大器和延迟器等功能,通常具有极低的自有噪声和较高的电源抑制比(power supply rejection ratio,psrr)。
[0082]
基于此,相对于直流-直流(direct current-direct current,dc-dc)电压转换器而言,采用低压差线性稳压器有利于降低电源电压噪声对车载传感器的传感信号的干扰,从而有利于确保由切换开关11输出的传感信号的稳定性。
[0083]
在上述实施方式的基础上,还可设置传感信号与车载传感器的供电信号调制在一起传输,以进一步减少互联线束的数量,从而有利于降低布线难度。该传输方式可称为线缆供电(power over coaxial,poc)的供电方式,即采用同轴线缆传输电压和传感信号,下面结合图4进行示例性说明。
[0084]
在一些实施例中,图4为本公开实施例的又一种数据一分二转换电路的结构示意图。参照图4,该数据一分二转换电路10还包括第一电感网络131和第一电容隔直网络132;第一电感网络131的第一端与电压转换器12的输入端121连接,第一电感网络131的第二端和第一电容隔直网络132的第一端均通过第一同轴线缆011与车载传感器21连接;第一电容隔直网络132的第二端连接切换开关11的输入端111,电压转换器12的输出端122连接切换开关11的电源端115。
[0085]
其中,车载传感器21的传感信号以高速串行信号的形式输出。第一同轴线缆011不仅传输该高速串行信号,还用于传输提供给摄像头的电源信号,该电源信号的电压范围可为8-16v,且为直流电压,即电源信号和高速串行信号调制在一起,经由第一同轴线缆011传
输。其中,高速串行信号为交流信号,电源信号为直流信号。
[0086]
现有技术中,没有可以直接支持高电压的高速切换开关,所以需要设置第一电感网络131和第一电容隔直网络132,以将高速串行信号和电源信号解耦,单独提取出高速串行信号和电源信号。具体地,采用第一电容隔离网络132提取高速串行信号,并接入切换开关11的输入端111;采用第一电感网络131提取直流电压,以实现为车载传感器21供电。
[0087]
其中,第一电感网络131和第一电容隔直网络132的电路结构在下文中示例性说明。
[0088]
在其他实施方式中,车载传感器21的供电线路与传感信号的传输线线路还可各自独立设置,此时的电路结构中,供电线路仅用于传输车载传感器21的电源电压,而传感信号在另一传输线线路进行传输,即两线路之间独立,其相互影响较小,从而电源电压较稳定,且传感信号的稳定性和鲁棒性较高。将该数据一分二转换电路应用于无人驾驶车辆时,有助于实现车载传感器在其视场范围内,实现对车身周围环境的较高精度的探测。
[0089]
在上述实施方式的基础上,还可在切换开关11和控制器之间设置电容隔直网络,以进一步提高传感信号的稳定性和鲁棒性。下面结合图5进行示例性说明。
[0090]
在一些实施例中,图5为本公开实施例的又一种数据一分二转换电路的结构示意图。参照图5,该数据一分二转换电路10还包括第二电容隔直网络142和第三电容隔直网络152;第二电容隔直网络142的第一端与第一控制单元22连接,第二端与第一输出端113连接;第三电容隔直网络152的第一端与第二控制单元23连接,第二端与第二输出端114连接。
[0091]
其中,切换开关11的第一输出端113输出的传感信号,经第二电容隔直网络142之后,传输至第一控制单元22;切换开关11的第二输出端114输出的传感信号,经第三电容隔直网络152之后,传输至第二控制单元23。由此,传感信号经电容隔直网络滤除直流信号之后,仅交流信号(即高速串行信号)传输至控制单元,从而有利于提高传输至控制单元的传感信号的稳定性和鲁棒性。
[0092]
在上述实施方式中,切换控制信号可由外部提供,或由第一控制单元22和第二控制单元23中的一个控制单元提供;切换开关11的电源电压也可由外部提供,或由第一控制单元22和第二控制单元23中的一个控制单元提供,下文中结合图5和图6进行示例性说明。
[0093]
在一些实施例中,继续参照图5,切换控制信号端112连接第一控制单元22和所第二控制单元23,以接收来自第一控制单元22或第二控制单元23的切换控制信号;电压来自外部电源16。
[0094]
其中,外部电源16的电压经电压转换器12转换之后,接入切换开关11的电源端115,实现为切换开关供电。同时,外部电源16的电压经第一电感网络131提取直流信号之后,接入车载传感器21,实现为车载传感器21供电。
[0095]
同时,切换开关11的第一输出端113与第一控制单元22之间的连接线路仅用于传输高速串行信号,而没有电源电压耦合在该连接线路上,从而降低了电源噪声对高速串行信号的干扰,提高了传输至第一控制单元22的传感信号的稳定性和鲁棒性。
[0096]
同理,切换开关11的第二输出端114与第二控制单元23之间的连接线路仅用于传输高速串行信号,而没有电源电压耦合在该连接线路上,从而降低了电源噪声对高速串行信号的干扰,提高了传输至第二控制单元23的传感信号的稳定性和鲁棒性。
[0097]
其中,切换开关11的切换控制信号端112连接第一控制单元22和第二控制单元23,
第一控制单元22和第二控制单元23用于提供切换控制信号,以实现传感信号分时传输至第一控制单元22和第二控制单元23。
[0098]
同时,无需额外设置提供切换控制信号的电路结构,有利于简化电路结构,便于该数据一分二转换电路的集成化设计。
[0099]
在其他实施方式中,切换控制信号也可由第一控制单元22和第二控制单元23中的其中一路控制单元输出,本公开实施例对此不限定。
[0100]
在其他实施方式中,切换控制信号还可由外部切换控制电路,即:对应于第一控制单元22和第二控制单元23的传感信号输入需求,具有相应切换控制逻辑的电路提供,本公开实施例对此不限定。
[0101]
图5中示出了电压有外部电源提供,在其他实施方式中,电压还可由第一控制单元22提供,切换控制信号可由第二控制单元23提供,如此,进一步简化电路结构。
[0102]
同时,基于车载传感器21与数据一分二转换电路10在空间位置上非集成设置,即二者之间存在一定的空间距离而需要远端连接的情况,可设置第一控制单元22与切换开关11之间采用同轴线缆传输,第二控制单元23与切换开关11之间采用同轴线缆传输,如此,还可减少互联线束的数量,利于降低布线难度。下面结合图6进行示例性说明。
[0103]
在一些实施例中,图6为本公开实施例的又一种数据一分二转换电路的结构示意图。参照图6,该数据一分二转换电路10还包括第二电感网络141和第三电感网络151;第二电感网络141的第一端和第二电容隔直网络142的第一端均通过第二同轴线缆012与第一控制单元22连接,第二电感网络141的第二端连接电压转换器12的输入端及第一电感网络131的第一端;第三电感网络151的第一端和第三电容隔直网络152的第一端均通过第三同轴线缆013与第二控制单元23连接,第三电感网络151的第二端连接切换开关11的切换控制信号端112。
[0104]
其中,车载传感器21和切换开关11的供电均由第一控制单元22来提供。第一控制单元22通过第二同轴线缆012连接到第二电感网络141,经第二电感网络141提取出电源电压后,该电源电压首先经过电压转换器12,转换成低电压后给切换开关11供电,同时,经过第一电感网络131后,给车载传感器21供电。因为车载传感器21和切换开关11的连接依旧是采用同轴线缆(即第一同轴线缆011)连接,所以提供给车载传感器21供电,还需要经过反向的电容隔直网络,重新和高速串行信号耦合在一起,然后经过第一同轴线缆011,传送给车载传感器21。
[0105]
此时,第一控制单元22与切换开关11之间只有一条互联线束,即第二同轴线缆012,切换开关11与车载传感器21之间只有一条互联线束,即第一同轴线缆011。
[0106]
同时,第二控制单元23通过第三同轴线缆013连接到第三电感网络151,经过第三电感网络141提取出直流电压,利用该直流电压有或无的状态,可实现逻辑上的“0”、“1”控制,从而实现对切换开关11的分时输出控制。
[0107]
示例性地,第二控制单元23工作时,需要车载传感器21的传感信号输入,此时第二控制单元23有电,第三同轴线缆013上电,经第三电感网络151之后,提取出直流电压,切换控制信号端112被拉高,传感信号由第二输出端114输出,经第三电容隔直网络152提取交流信号后,传输至第二控制单元23,即满足第二控制单元23的传感信号输入需求。
[0108]
第二控制单元23不工作时,其不需要车载传感器21的传感信号输入,第一控制单
元22需要传感信号输入。此时,第二控制单元23断电,第三同轴线缆013上也会断电,第三电感网络151无法提取直流电压,切换控制信号端112被拉低,传感信号被切换,由第一输出端113输出,经第二电容隔直网络142提取交流信号后,传输至第一控制单元22,即满足第一控制单元22的传感信号输入需求。
[0109]
由此,第二控制单元23与切换开关11之间仅有一条互联线束,即第三同轴线缆013。
[0110]
在图6示出的数据一分二转换电路中,无需额外设置供电电源和切换控制信号源,仅利用三条同轴线缆即可实现由控制单元提供电压和切换控制信号,从而电路结构简单,易于集成设置;同时,由切换开关11经物理切换的方式实现传感信号的分时切换输出,避免了控制单元端的车载传感器接口程序的修改,将该数据一分二转换电路应用于数据一分二转换系统时,有利于降低系统整体的设计难度。
[0111]
在上述实施方式中,数据一分二转换电路10可设置于板卡上,车载传感器21、第一控制单元22和第三控制单元23均可通过板卡的接口实现与数据一分二转换电路10的连接。
[0112]
在上述实施方式的基础上,还可将高速串行信号转换为差分信号,后将其输入至数据一分二转换电路,以抑制在电路板上走线受到的差模干扰,从而提高高速串行信号的传输稳定性和鲁棒性。
[0113]
在一些实施例中,对于由第一电容隔直网络132提取出来的高速串行信号,在板卡入口处即转换为差分信号传输,然后传输至可以支持高速串行差分信号一分二的切换开关11,从而实现传感信号一分二输出。切换后的传感信号输出也为差分信号输出方式,经过第二电容隔直网络142或第三电容隔直网络152之后,在板卡的出口处转换为单端信号,由互联线束传输至控制单元。
[0114]
由此,切换开关11的输入端111、第一输出端113和第二输出端114传输的传感信号均可为差分信号。
[0115]
在上述实施方式中,电感网络和电容隔离网络可采用本领域技术人员可知的任一种电路结构,可根据数据一分二转换电路的需求设置,本公开实施例对此不限定。
[0116]
在一些实施例中,电感网络和电容隔离网络可采用图7所示的电容电感网络的结构。参照图7,电容隔直网络隔离直流电源部分,提取交流信号,电感网络隔离交流电信号部分,提取直流信号。
[0117]
在其他实施方式中,电感网络和电容隔离网络还可采用其他电容电感网络结构。
[0118]
在上述实施方式中,切换开关11可为本领域技术人员可知的任一种满足上述信号传输速率要求以及数据一分二转换要求的切换开关。在一些实施例中,切换开关11可采用hd3ss323-q1开关。
[0119]
在其他实施例中,切换开关11还可根据数据一分二转换电路的需求设置,本公开实施例对此不限定。
[0120]
在上述实施方式中,车载传感器21(例如摄像头)的上电和使用时,需要进行参数配置,配置方式可为通过低速控制信号实现配置,该低速控制信号也可耦合在同轴线缆中,即形成低速控制通道。由此,同轴线缆上可将对应于传感信号的高速串行信号、对应于参数配置的低速控制信号以及电源电压信号(或者对应于实现切换开关11的切换控制的切换控制信号)耦合在一起,以减少互联线束的数量。
[0121]
基于此,当需要对车载传感器进行参数配置时,可通过上述低速控制通道对车载传感器进行配置,该低速控制信号的信号流方向由控制单元流向车载传感器,其与传感信号对应的高速串行信号的信号流的方向是反方向的。
[0122]
本公开实施例提供的数据一分二转换电路,包括切换开关11,可基于切换控制信号,将车载传感器21的传感信号分时输出至第一控制单元22和第二控制单元23,从而实现传感信号在第一控制单元22和第三控制单元23之间的分时共享。如此可减少需要设置的车载传感器21的数量,有利于降低车载传感器21的安装难度,降低相关走线的布线难度。进一步地,设置切换开关11由第一控制单元22供电,由第二控制单元23提供切换控制信号,从而可无需额外设置供电电源和切换控制信号源,且可利用同轴线缆实现第一控制单元22和第二控制单元23分别与切换开关11连接,从而可简化电路结构,减少走线数量,从而有利于降低布线难度。与之并列的,切换开关11可由外部电源供电,传感信号与切换开关控制信号由各自独立的线路传输,如此可降低信号之间的相互干扰,有利于确保各信号的稳定性,从而实现有效控制和精确探测。
[0123]
在上述实施方式的基础上,本公开实施例还提供了一种数据一分二转换系统(下文中可简称为“系统”),该数据一分二转换系统可包括上述实施方式提供的任一种数据一分二转换电路。因此,该数据一分二转换系统也具有上述任一种数据一分二转换电路所具有的有益效果,相同之处可参照上文中对数据一分二转换电路的解释说明进行理解,下文中不再赘述。
[0124]
在一些实施例中,图8为本公开实施例的一种数据一分二转换系统的结构示意图。参照图8,该数据一分二转换系统20包括:转换电路;车载传感器21,连接至切换开关11的输入端;第一控制单元22,连接至切换开关11的第一输出端113;第二控制单元23,连接至切换开关11的第二输出端114;其中,切换开关11在切换控制信号的控制下,分时输出传感信号至第一控制单元22或第二控制单元23。
[0125]
其中,转换电路可采用上述任一种数据一分二转换电路10。
[0126]
其中,车载传感器21采集到的传感信号传输至切换开关11,切换开关11基于切换控制信号的控制,分时选择第一输出端113或第二输出端114进行输出,即传感信号分时输出至第一控制单元22或第二控制单元23。由此,实现车载传感器21的传感信号在第一控制单元22和第二控制单元23之间共享,从而可无需为第一控制单元22和第三控制单元23设置各自独立的车载传感器21,可减少该系统中的车载传感器21的数量,从而可简化系统结构,降低车载传感器21的安装难度,以及降低相关走线的布线难度。
[0127]
同时,系统中的车载传感器21的传感信号是经由数据一分二转换电路10分时输出至第一控制单元22或第二控制单元23,即采用物理切换方式进行切换,从而避免了在控制单元端的车载传感器接口程序的修改,降低了系统设计难度。
[0128]
示例性地,当数据一分二转换电路10采用图5所示的电路结构时,切换开关11和车载传感器21均由外部电源16供电,切换开关11的切换控制信号由第一控制单元22和第二控制单元23提供,且与传感信号分开独立传输。基于此,传感信号受电源电压和切换控制信号的干扰较小,有利于确保传感信号的稳定性和鲁棒性。
[0129]
示例性地,当数据一分二转换电路10采用图6所示的电路结构时,切换开关11和车载传感器21均由第一控制单元22供电,切换开关11的切换控制信号由第二单元23提供,且
与传感信号采用同轴线缆传输。基于此,可无需增加额外的供电线束和控制线束,只需要在系统中将原来的车载传感器线束断开,接入数据一分二转换电路即可,减少该系统中互联线束的数量,简化系统结构,降低系统的布设难度。
[0130]
在其他实施方式中,还可设置该系统中,切换控制信号源独立设置,切换开关11和车载传感器21由第一控制单元22供电,或由第二控制单元23供电;或者设置该系统中,由外部电源独立为切换开关11和车载传感器21供电,切换控制信号由第一控制单元22或第二控制单元23提供,可根据系统的需求设置,本公开实施例对此不限定。
[0131]
在一些实施例中,图9为本公开实施例的另一种数据一分二转换系统的结构示意图,图10为本公开实施例的又一种数据一分二转换系统的结构示意图。在图8的基础上,参照图9或图10,车载传感器21为摄像头210。
[0132]
其中,摄像头210采集的传感信号为视频数据,该视频数据可在两个控制单元之间共享,从而可减少该系统中的摄像头210的数量,降低摄像头210的安装难度,以及降低相关走线的布线难度。
[0133]
在其他实施方式中,车载传感器21还可为本领域技术人员可知的其他类型的传感器,本公开实施例对此不限定。
[0134]
在上述实施方式的基础上,摄像头210的数量可为1个、2个或更多个,可根据该系统的需求设置,本公开实施例对此不限定。
[0135]
当摄像头210的数量为2个或更多个时,可根据系统的需求设置部分摄像头210的视频数据被共享,也可设置全部摄像头210的视频数据均被共享,本公开实施例对此不限定,下文中结合图11和图12进行示例性说明。
[0136]
在一些实施例中,图11为本公开实施例的又一种数据一分二转换系统的结构示意图,图12为本公开实施例的又一种数据一分二转换系统的结构示意图。在图8的基础上,结合图11和图12,切换开关11的数量为n个,摄像头210的数量为m个,m和n均为正整数,且m≥n;第一控制单元22包括m个传感信号接收端,第二控制单元23包括n个传感信号接收端;其中,n个摄像头210的传感信号分时传输至第一控制单元22和第二控制单元23,剩余m-n个摄像头210的传感信号仅传输至第一控制单元22。
[0137]
其中,第一控制单元22对m个摄像头210的视频数据有输入需求,第二控制单元23对n个摄像头210的数据有输入需求。该系统中,通过设置n个摄像头210的视频数据被第一控制单元22和第二控制单元23分时共享,可设置m个摄像头210,即可同时满足第一控制单元22和第二控制单元23的视频数据输入需求。从而相对于现有技术需要设置m+n个摄像头210的系统设置方式,本实施例的系统可减少n个摄像头210,摄像头210的数量较少,且互联线束较少;如此可降低摄像头210的安装难度,以及降低相关走线的布线难度。
[0138]
示例性地,图11中示例性地示出了m=n,即摄像头210的数量和切换开关的数量均为n个,该n个摄像头210的视频数据均被第一控制单元22和第二控制单元23分时共享。相对于现有技术,摄像头210的数量减半。
[0139]
示例性地,图12中示例性地示出了m>n,即摄像头210的数量大于切换开关的数量,该m个摄像头210中,n个摄像头210的视频数据被第一空置单元22和第二控制单元23分时共享,剩余m-n个摄像头210的视频数据仅传输至第一控制单元22。
[0140]
基于此,当第一控制单元22的传感信号接收端和第二控制单元23的传感信号接收
端的数量不相等时,可基于传感信号接收端数量较少的控制单元确定切换开关的数量,可选的,切换开关的数量等于该控制单元的传感信号接收端的数量;可基于传感信号接收端数量较多的控制单元确定摄像头210的数量,可选的,摄像头210的数量等于该控制单元的传感信号接收端的数量。基于此,每个切换开关可对应将一个摄像头210的视频数据分时共享给两个控制单元,从而实现摄像头210数量的减少。
[0141]
在其他实施方式中,若摄像头210的数量大于切换开关的数量,除设置于切换开关等数量的摄像头210的数据通过其对应的切换开关在第一控制单元和第二控制单元之间分时共享之外;剩余摄像头210中,一部分数量的摄像头210的数据可仅传输至第一控制单元,另一部分的摄像头210的数据可仅传输至第二控制单元,可根据该系统的需求设置,本公开实施例对此不限定。
[0142]
在其他实施方式中,当控制单元的数量为3个或者更多个时,还可设置单个摄像头210的视频数据被任意两个控制单元分时共享,可根据系统的需求设置,本公开实施例对此不限定。
[0143]
下面以n=2,m=4为例,结合应用场景对该系统进行示例性说明。
[0144]
在一些实施例中,第一控制单元22为无人驾驶控制器,第二控制单元23为adas控制器。
[0145]
结合上文,第一控制单元22为无人驾驶控制器时,其需要环绕车身的至少6路摄像头的视频数据输入;第二控制单元23为adas控制器时,其需要环绕车身的至少4路摄像头的视频数据输入。基于此,可采用该系统共设置6路摄像头,其中4路摄像头的视频数据被adas控制器和无人驾驶控制器分时共享,剩余2路摄像头的视频数据仅传输至无人驾驶控制器。
[0146]
对于视频数据被共享的4路摄像头而言,通过控制切换开关,可实现对视频数据传输至l2控制器或者l4控制器的切换操作。通路切换到对应的控制器后,相当于控制器的物理通路也直接连接到摄像头端,也实现了控制器对摄像头的直接控制,减少了中间转接的环节。
[0147]
其中,对摄像头而言,摄像头、切换开关以及控制器的通讯可采用poc的方式,即摄像头的供电和视频数据的传输在同轴线缆上进行,同轴线缆既能传输视频数据,同时也传送给摄像头和切换开关的供电电压。如此,可减少摄像头和切换开关之间,以及切换开关与控制器之间的互联线束的数量。
[0148]
摄像头的供电来自于无人驾驶控制器由同轴线缆传送过来的电压。当引入数据一分二转换电路后,无人驾驶控制器的同轴线缆连接到数据一分二转换电路的第二电感网络,经第二电感网络提取出直流电压,作为电源信号,该电源信号经过电压转换器,转化成低电压给切换开关供电;同时,经过第一电感网络后,由同轴线缆输出,给摄像头供电。在此基础上,摄像头和数据一分二转换电路采用单根同轴线缆的连接方式,因此,提供给摄像头的供电电压,还需要经过反向的电容隔直网络,重新和高速串行信号耦合在一起,经过一根同轴线缆(即上文中的第一同轴线缆),传送给摄像头。
[0149]
进一步地,为了减少切换开关和控制器的连接线束数量,切换方式可以为:采用adas控制器传输过来的poc供电中通过电感网络提取出直流电压,利用该直流电压的有或者无的状态,来实现控制器的切换。控制逻辑可为:adas控制器有电时,需要摄像头的视频数据输入,poc上会有电,切换开关的切换控制信号端被拉高,视频数据传输至adas控制器;
adas控制器不工作时,电源断开,即不需要摄像头的视频数据输入,poc上同步断电,切换开关的切换控制信号端变低,视频数据传输至无人驾驶控制器。
[0150]
如此,实现了摄像头的视频数据在无人驾驶控制器和adas控制器之间的分时共享,同时无需增加额外的供电和控制线束,只需要在系统中将原来的摄像头线束断开,接入该切换开关即可,简化了系统结构,降低了系统复杂度。
[0151]
同时,对控制器端而言,摄像头的视频数据是通过物理切换的方式实现了分时共享,其和原来的单独控制的方式没有区别,由此避免了控制器端的摄像头接口程序的修改。
[0152]
综上,利用6路摄像头和4个数据一分二转换电路满足了adas控制器和无人驾驶控制器的视频数据的输入需求。
[0153]
在一些实施例中,无人驾驶控制器的级别可为l3级、l4级或l4级以上的级别,adas控制器的级别可为l1级或l2级。
[0154]
示例性地,实际产品中,adas控制器的级别为l2级,无人驾驶控制器的级别为l4级;或者,adas控制器的级别为l2级,无人驾驶控制器的级别为l4以上的级别。
[0155]
在其他实施方式中,第一控制单元22和第二控制单元23还可为任何两个需要车载传感器21(例如摄像头)的传感信号分时输入的控制单元,本公开实施例对此不限定。
[0156]
本公开实施例提供的数据一分二转换系统,可实现车载传感器的传感信号的一分二输出,即至少部分车载传感器的传感信号可在不同的控制单元之间分时共享,减少了车载传感器的数量,电路结构简单,且无需更改系统摄像头控制流程;同时,实车应用改动较小,将车载传感器接入数据一分二转换电路即可,安装难度较小,且相关走线的布线难度较低。
[0157]
在上述实施方式的基础上,本公开实施例还提供了一种无人驾驶车辆,该无人驾驶车辆包括上述实施方式提供的任一种数据一分二转换系统。因此,该无人驾驶车辆也具有上述实施方式中的数据一分二转换电路和系统的有益效果,相同之处可参照上文中对数据一分二转换电路和系统的解释说明进行理解,下文中不再赘述。
[0158]
在其他实施方式中,无人驾驶车辆还可包括本领域技术人员可知的其他结构部件,本公开实施例对此不赘述也不限定。
[0159]
需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0160]
以上所述仅是本公开的具体实施方式,使本领域技术人员能够理解或实现本公开。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本公开的精神或范围的情况下,在其它实施例中实现。因此,本公开将不会被限制于本文所述的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips