
 商标分类
商标分类  商标转让
商标转让 
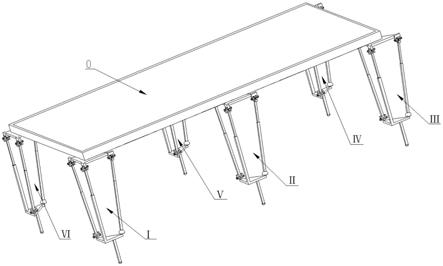
一种新型并联腿式六足机器人装置的制作方法
2021-02-07[0001]本实用新型涉及仿生机器人技术领域,尤其是一种新型并联腿式六足机器人装置。背景技术:[0002]六足移动机器人是一种模仿多足动物运动方式的腿式运动机器人,具有丰富的步

一种具有运动分岔特性并联机构的制作方法
2021-01-19本发明涉及机构学及机器人技术领域,特别是涉及一种具有运动分岔特性并联机构。背景技术:机构学研究领域在传统上来说主要研究具有固定自由度特性的并联机构。其具有刚度大、承载能力大、微

 热门资讯
热门资讯




tips