
 商标分类
商标分类  商标转让
商标转让 
一种自动化抛光生产线的制作方法
 2021-01-30 03:01:15|
2021-01-30 03:01:15| 278|
278| 起点商标网
起点商标网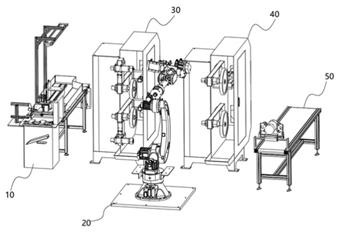
[0001]
本发明涉及自动化生产技术领域,尤其涉及一种自动化抛光生产线。
背景技术:
[0002]
金属保温杯壶(如不锈钢保温杯、钛保温杯等)为薄壁圆筒形,其内胆和外壳分别经滚压、水涨成型后,两者在端口处需要焊接在一起。
[0003]
实际生产中,由于焊缝的存在令金属保温杯壶的整体不够平整美观,并且存在一定的毛刺影响使用。因此,通常采用抛光机和砂带机对金属保温杯壶进行打磨,金属保温杯壶的表面通过砂带或抛光轮发生摩擦后,产品表面的焊缝和毛刺变得光滑平整,整体变得美观。目前,焊缝处理工作主要由人工进行,由于不同操作人员抛光力度等的不同,无法实现恒压抛光。因此,得到的产品表面光滑度不一,而且作业人员稍有失误,都可能会对金属杯壶的表面造成不可弥补的操作,大大影响了产品的质量。而且,由于抛光过程中,会产生大量的粉尘等,在环境中漂浮,大大危害了操作人员的身体健康。随着自动化生产的普及,人工作业具有效率较低以及不利于企业节省成本等缺点。
技术实现要素:
[0004]
为解决上述的问题,本发明的目的在于提供一种无需人工操作的用于对金属保温杯壶进行抛光的自动化抛光生产线。
[0005]
本发明的目的采用如下技术方案实现:一种自动化抛光生产线,包括:焊缝检测工位,所述焊缝检测工位包括具有图像识别功能的工业相机模组和三轴机械臂,所述三轴机械臂设有旋转夹持头,所述旋转夹持头和所述工业相机模组相对设置;机器人夹具,所述机器人夹具包括六轴机器人,所述六轴机器人连接有杯壶夹具,所述杯壶夹具包括可驱动所述杯壶夹具旋转的夹具电机;砂带机,所述砂带机包括两个以上的打磨工位,所述打磨工位设有浮动摆臂机构和张紧机构,所述打磨工位通过所述浮动摆臂机构和所述砂带机的机架可活动连接;抛光机,所述抛光机包括两个以上的抛光工位,所述抛光工位设有补偿机构和浮动摆臂机构,所述抛光工位通过所述浮动摆臂机构和所述抛光机的机架可活动连接;下料工位,所述下料工位包括下料传送带,所述下料传送带沿运动方向的初始端设有可旋转的下料夹具;所述六轴机器人可随指令在所述焊缝检测工位、所述抛光机、所述砂带机以及所述下料工位四个工位之间移动。
[0006]
进一步地,所述杯壶夹具包括连接平台和夹持机构,所述夹具电机通过传动机构和所述夹持机构连接,所述夹持机构安装于所述连接平台,所述夹具电机固定于所述连接平台的一侧;所述夹持机构包括主动夹具座和从动夹具座,所述主动夹具座和所述从动夹具座均安装有一个夹持头并且两个所述夹持头可对调设置;所述主动夹具座和所述从动夹
具座相对设置,所述夹具电机通过所述传动机构驱动所述主动夹具座转动,所述从动夹具座以夹持的产品为传动轴跟随所述主动夹具座一并转动。
[0007]
进一步地,所述杯壶夹具还包括直线气缸、导轨和安装于所述导轨上的滑块,所述从动夹具座的左右两侧连接于所述滑块,所述直线气缸的活塞杆与所述从动夹具座可伸缩连接。
[0008]
进一步地,所述浮动摆臂机构包括固定座、连接杆、浮动气缸和活动臂,所述活动臂通过所述连接杆与所述固定座活动连接,所述连接杆通过所述浮动气缸限制所述活动臂的活动范围。
[0009]
进一步地,所述砂带机包括工作轮以及驱动电机,所述张紧机构包括调整轮和直线气缸,所述直线气缸设于所述活动臂的一端,所述调整轮和所述直线气缸活动连接,所述工作轮和所述调整轮设于所述活动臂的相对两端,所述驱动电机设于所述活动臂并驱动所述工作轮和所述调整轮转动。
[0010]
进一步地,所述抛光机包括抛光轮以及驱动所述抛光轮转动的驱动电机,所述抛光轮和所述驱动电机设于所述活动臂,所述补偿机构包括导轨、滑块、第一压力传感器、补偿电机、齿轮和齿条,所述补偿电机驱动所述齿轮转动,所述齿轮和所述齿条啮合,所述齿条、所述滑块和所述固定座一体式连接,所述第一压力传感器检测所述浮动气缸和所述连接杆之间的压力,所述固定座与所述导轨通过所述滑块可滑动连接。
[0011]
进一步地,所述焊缝检测工位还包括进料传送带,沿所述进料传送带的运动方向依次设有阻挡气缸、第一夹紧气缸和第二夹紧气缸,所述三轴机械臂和所述工业相机模组设置于所述第一夹紧气缸和第二夹紧气缸两者之间。
[0012]
进一步地,所述抛光机还包括打蜡装置,所述打蜡装置设有缓冲气缸和伺服模组,所述缓冲气缸的活塞端设有蜡块,所述伺服模组推动所述蜡块沿水平方向作直线运动。
[0013]
进一步地,所述砂带机和所述抛光机均设有连通内部的抽风机。
[0014]
相比现有技术,本发明的有益效果在于:1.焊缝检测工位具有识别直线焊缝位置的图像识别功能,并且可以自动夹取杯壶并移动到检测位置,为直线焊缝的打磨做定位,从焊缝检测、夹持工件以及打磨焊缝三个工序实现整线机械自动化。
[0015]
2.砂带机和抛光机具有浮动调整的特点,利用浮动摆臂机构形成浮动压力与来自工件的推力互相平衡抵消,从而令砂带机和抛光机均具有恒定的打磨压力。
[0016]
3.抛光机具有磨损位置补偿功能,砂带机具有自动张紧的功能。
[0017]
4.具有自动下料的下料工位,全程实现机械自动化,不需要人工操作。
附图说明
[0018]
图1是本发明的所有工位的分布示意图;图2是本发明的焊缝检测工位的俯视图;图3是本发明的焊缝检测工位的立体图;图4是本发明的六轴机器人和杯壶夹具的连接示意图;图5是本发明的杯壶夹具的立体图;图6是本发明的杯壶夹具夹持杯壶时的工作状态示意图;
图7是本发明的杯壶夹具的底部结构示意图;图8是本发明的砂带机整体结构示意图;图9是本发明的砂带机的打磨工位结构示意图;图10是本发明的砂带机的打磨工位的后视图;图11是本发明的抛光机整体结构示意图;图12是本发明的抛光机的抛光工位装上打磨装置后的结构示意图;图13是本发明的抛光机的抛光工位的后视图;图14是本发明的抛光机的补偿机构的传动部件结构示意图;图15是本发明的抛光机的下料工位的俯视图。
[0019]
图中:10、焊缝检测工位;20、机器人夹具;30、砂带机;40、抛光机;50、下料工位;60、抽风机;100、进料传送带;101、阻挡气缸;102、第一夹紧气缸;110、三轴机械臂;111、旋转夹持头;112、工业相机;113、检测光源;120、第二夹紧气缸;200、杯壶夹具;201、六轴机器人;202、连接平台;203、侧板;204、法兰;210、主动夹具座;211、从动夹具座;212、第一夹持头;213、第二夹持头;214、支撑轮;220、夹具电机;230、第一直线气缸;231、第一导轨;232、第一滑块;240、传动机构;241、转轴;242、传动轴;300、工作轮;310、第一活动臂;311、固定板;312、第一连接杆;313、第一驱动电机;314、第一浮动气缸;315、第一配重模块;316、第一轴承;320、第二直线气缸;321、调整轮;400、抛光轮;410、第二活动臂;411、第二驱动电机;412、第二连接杆;413、第二浮动气缸;414、第二轴承;415、第二配重模块;420、固定座;421、底部连接梁;422、齿轮;423、齿条;424、第二导轨;425、第二滑块;430、补偿电机;440、伺服模组;441、缓冲气缸;442、蜡块;500、下料传送带;501、下料夹具;502、夹具旋转装置。
具体实施方式
[0020]
下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
[0021]
如图1和图4所示,本发明公开了一种自动化抛光生产线,包括:焊缝检测工位10、机器人夹具20、砂带机30、抛光机40以及下料工位50。机器人夹具20包括六轴机器人201,六轴机器人201连接有杯壶夹具200。本自动化抛光生产线的第一步,通过指令操控六轴机器人201移动杯壶夹具200至焊缝检测工位10,杯壶夹具200夹取表面粗糙且带有焊缝的金属保温杯壶。第二步,六轴机器人201随指令将杯壶夹具200移动至砂带机30进行对表面进行全面打磨。杯壶夹具200将待打磨的工件对准砂带机30中转动的砂带进行打磨,根据程序预设的时间打磨完毕后,六轴机器人201将杯壶夹具200移动至抛光机40对焊缝进行精准抛光。根据程序预设的时间抛光完毕后,金属保温杯壶的表面已经变得光滑平整,此时可以进行下料,六轴机器人201将杯壶夹具200移动至下料工位50令金属保温杯壶落入至下料工位50进行下料。
[0022]
如图2和图3所示,焊缝检测工位10包括进料传送带100、具有图像识别功能的工业相机模组和三轴机械臂110,沿进料传送带100的运动方向依次设有阻挡气缸101、第一夹紧气缸102和第二夹紧气缸120。三轴机械臂110和工业相机模组设置于第一夹紧气缸102和第二夹紧气缸120两者之间。三轴机械臂110设有旋转夹持头111,旋转夹持头111和工业相机
模组相对设置。经加工后初步成型的金属保温杯壶经进料传送带100流入本生产线,工业相机模组每次只对一个金属保温杯壶的焊缝进行定位,传动带末端设有可供单个金属保温杯壶通过的过道,金属保温杯壶通过过道后,阻挡气缸101推动拦截块封闭过道,防止重复送料,待金属保温杯壶完成焊缝检测后重新开放过道。金属保温杯壶通过过道后,第一夹紧气缸102将其夹紧,三轴机械臂110水平方向移动至第一夹紧气缸102的上方并垂直下降,旋转夹持头111将金属保温杯壶夹紧后移动至工业相机模组的正前方进行拍摄。工业相机模组设有工业相机112和检测光源113,检测光源113对金属保温杯壶的表面进行打光,在强光的照射下,工业相机112所拍摄的焊缝照片更易于图像识别系统识别,旋转夹持头111进行360度自转,令金属保温杯壶的表面均被工业相机112所拍摄。工业相机112拍摄获得的照片经图像识别系统进行处理,图像识别系统包括一个用于识别焊缝的图像模型库,经图像识别系统所识别得到的焊缝位置会转换为坐标发送给六轴机器人201。焊缝识别完毕后,三轴机械臂110水平方向移动至第二夹紧气缸120的上方并松开金属保温杯壶,第二夹紧气缸120将金属保温杯壶夹紧,六轴机器人201移动杯壶夹具200夹取金属保温杯壶。
[0023]
如图7所示,本发明中,包括连接平台202、夹持机构、传动机构240和夹具电机220。连接平台202为长方形的板体,板体的底部设有用于连接六轴机器人201的法兰204。六轴机器人201连接法兰204后,可抬起所有与连接平台202连接的部件一并移动,六轴机器人201控制连接平台202将待抛光的金属保温杯壶对准砂带机30或抛光机40。夹持机构安装于连接平台202,连接平台202还包括侧板203,侧板203与连接平台202的一侧垂直连接,夹具电机220固定于侧板203,本发明采用伺服电机作为夹具电机220,伺服电机能对线速度和力矩进行闭环控制,从而可根据工件大小调定恒线速度打磨。夹持机构包括主动夹具座210和从动夹具座211,主动夹具座210和从动夹具座211于同一直线上相对设置,夹具电机220通过传动机构240驱动主动夹具座210转动,从动夹具座211以夹持的产品为传动轴242跟随主动夹具座210一并转动。主动夹具座210和从动夹具座211均安装有一个夹持头,如图5和图6所示,主动夹具座210设有第一夹持头212,从动夹具座211设有第二夹持头213,第一夹持头212的直径较小,用于固定金属壶的顶部,第二夹持头213的直径较大,用于固定金属壶的底部。并且,第一夹持头212和第二夹持头213可对调设置,即第一夹持头212安装于从动夹具座211,第二夹持头213安装于主动夹具座210,以满足不同弧面的抛光需要,并且抛光磨头在打磨过程中便不需要横向移动,降低了设备成本,进一步提高了生产效率。当使用夹持杯口的第一夹持头212作为主动旋转时,主动夹具座210利用硅胶或橡胶充气圈产生旋转摩擦力矩,当使用夹持杯底的第二夹持头213作为主动旋转时,主动夹具座210使用橡胶圈产生旋转摩擦力矩。传动机构240包括主动轮、传动带和从动轮,主动轮设于主动夹具座210的传动轴242,主动轮通过传动带与夹具电机220的转轴241可转动连接,主动轮带动传动轴242转动主动夹具座210。从动轮设于从动夹具座211,从动轮通过待抛光的金属壶传递动力至从动轮,从动轮带动从动夹具座211上的夹持头进行旋转。为了满足不同长度杯壶的抛光需求,本发明还包括调整机构,调整机构设置于连接平台202,从动夹具座211与调整机构可滑动设置并与主动夹具座210距离可调地相对设置。调整机构包括第一直线气缸230、第一导轨231和安装于第一导轨231上的第一滑块232,从动夹具座211的左右两侧连接于第一滑块232,第一直线气缸230的活塞杆与从动夹具座211可伸缩连接。在第一直线气缸230的推动下,从动夹具座211可在第一导轨231上水平滑动,从而调整与主动夹具座210的间距以适配
夹持不同长度的杯壶。本发明还包括支撑轮214,支撑轮214设置于主动夹具座210和从动夹具座211之间。支撑轮214用于在抛光过程中对重量和长度较大的一类杯壶进行支撑,从而保证杯壶的各处能够得到均匀的打磨,有效提高了产品质量。
[0024]
如图8、图9和图10所示,本发明中,砂带机30设置有用于驱动砂带运动的驱动机构。本实施例中,砂带机30设有两个打磨工位,两组工位具有单工位或多工位快速切换功能。每个工位包括两个工作轮300以及驱动工作轮300转动的第一驱动电机313,第一驱动电机313为伺服电机。打磨工位设有浮动摆臂机构和张紧机构,张紧机构包括调整轮321和第二直线气缸320,第二直线气缸320设于第一活动臂310的一端,调整轮321和第二直线气缸320活动连接,调整轮321和工作轮300设于第一活动臂310相对的两端。每个工位的砂带张紧于驱动机构的一上一下的两个工作轮300以及调整轮321。浮动摆臂机构包括固定板311、第一活动臂310和第一浮动气缸314。工作轮300设于第一活动臂310,其中,第一活动臂310内部为空心,第一驱动电机313固定于第一活动臂310并且其输出转轴241插设于第一活动臂310内部,输出转轴241通过传送带连接于两个工作轮300和调整轮321进行传动。固定板311设有第一轴承316,第一活动臂310包括第一连接杆312,第一连接杆312与第一轴承316转动连接。固定板311固定于砂带机30的内部,第一活动臂310与固定板311活动连接。第一浮动气缸314的气缸连接于固定板311,第一浮动气缸314的活塞连接于第一连接杆312,气缸驱动活塞沿水平方向直接运动。抛光的工件与砂带接触时,会对整个工位施加推力,第一浮动气缸314对第一连接杆312施加的压力与工件对工位施加的推力相抵消。在第一浮动气缸314的压力作用下,第一活动臂310的活动范围受到限制,砂带所处的位置保持和工件持续接触,从而令打磨压力保持恒定。摆臂机构还包括第一配重模块315,第一配重模块315用于增加第一活动臂310的稳定性,第一配重模块315设于第一活动臂310或第一连接杆312。恒定的打磨压力对抛光工件来说具备控制更加稳定、打磨的质量更好的优点。
[0025]
本发明中,砂带机30还设有报警机构,报警机构用于在砂带断裂时提醒工人。报警机构包括第一压力传感器和提醒装置,第一压力传感器设于第一活动臂310并且与砂带接触,第一压力传感器电连接于提醒装置,提醒装置为蜂鸣器和警告灯,当砂带断裂时,第一压力传感器对砂带检测的压力产生大幅度变化,使警告灯发出红光闪烁以及蜂鸣器发出声音对工人进行提醒,并同时关闭电源避免生产事故的发生。并且,在抛光生产时,造成的灰尘以及金属碎屑如果无法及时处理,容易对工位造成污染,影响驱动机构和摆臂机构的使用寿命,并且,砂带和工件接触打磨时容易因为摩擦而生成大量的热量,容易导致工位温度会急剧升高,影响打磨质量。因此,本发明中,砂带机30还设有冷却机构和抽风机60,冷却机构包括喷雾泵和喷雾喷头,喷雾喷头连接于喷雾泵,喷雾喷头设置于砂带机30的内部,喷雾喷头的喷雾方向对准于每个打磨工位,喷头产生的水雾能够对工位进行降温处理。抽风机60与工作轮300相对设置,抽风机60在砂带机30内部形成吹向外界的风道,抽风机60抽风时将工位内的灰尘和金属碎屑一并抽出至外界。
[0026]
如图11、图12和图13所示,抛光机40设有两个抛光工位,两组工位具有单工位或多工位快速切换功能。每组工位包括抛光轮400以及驱动抛光轮400转动的第二驱动电机411,第二驱动电机411为伺服电机。抛光机40还包括浮动调整机构,浮动调整机构包括固定座420和第二活动臂410,固定座420固定于抛光机40的内部,第二活动臂410与固定座420活动连接,抛光轮400设于第二活动臂410的其中一端。其中,第二活动臂410内部为空心,第二驱
动电机411固定于第二活动臂410并且其输出转轴241插设于第二活动臂410内部,输出转轴241通过传送带连接于抛光轮400进行传动。固定座420设有第二轴承414,第二活动臂410包括第二连接杆412,第二连接杆412与第二轴承414转动连接。摆臂机构还包括第二配重模块415,第二配重模块415用于增加第二活动臂410的稳定性,第二配重模块415设于第二活动臂410或第二连接杆412。浮动调整机构还包括第二浮动气缸413,第二浮动气缸413设于固定座420,待抛光的工件触碰抛光轮400时,产生的推力将整个第二活动臂410以及第二连接杆412往推力方向进行推动,第二浮动气缸413一直保持推出状态,在第二连接杆412被推动至第二浮动气缸413时形成浮动推力与来自工件的推力互相平衡抵消,从而达到恒定的打磨压力。恒定的打磨压力对抛光工件来说具备控制更加稳定、打磨的质量更好的优点。本发明中,抛光机40还包括打蜡装置,打蜡装置设有缓冲气缸441和伺服模组440,缓冲气缸441的活塞端设有蜡块442,伺服模组440推动蜡块442沿水平方向作直线运动。蜡块442和抛光轮400接触后,抛光轮400的表面涂有抛光膏,当抛光轮400高速旋转,金属保温杯壶与抛光轮400摩擦产生高温,使金属保温杯壶的金属塑形提高,在抛光膏的作用下,金属表面产生塑性峦形,凸起部分被压入并流动,凹的地方被填平,从而使细微不平的表面得到进一步的改善。
[0027]
如图14所示,抛光机40还包括补偿机构,补偿机构包括第二压力传感器、第二导轨424、补偿电机430、齿轮422、齿条423和底部连接梁421,齿轮422、齿条423和导轨设置于底部连接梁421,第二导轨424上设置有可滑动的第二滑块425,底部连接梁421固定于抛光机40的内部。补偿电机430设置于固定座420,补偿电机430的输出转轴241穿设于底部连接梁421并同时连接齿轮422,齿轮422和齿条423啮合,补偿电机430驱动齿轮422转动。齿条423、固定座420和第二滑块425经螺丝固定成为一体结构。第二压力传感器检测第二浮动气缸413和第二连接杆412之间的压力。当第二压力传感器检测不到信号,补偿机构会启动进给,补偿电机430启动时,齿轮422转动并带动齿条423进行水平位移,第二导轨424上包括固定座420在内的整个工位可水平移动,从而补偿抛光轮400和工件两者的距离,一直到第二压力传感器有检测信号输入才停止动作。
[0028]
本发明中,抛光机40设有与砂带机30结构一致的冷却机构和抽风机60。
[0029]
如图15所示,本发明中,下料工位50包括下料传送带500、下料夹具501以及夹具旋转装置502。下料夹具501和夹具选装装置设于下料传送带500的运动方向初始端,夹具旋转装置502能带动下料夹具501进行90
°
旋转。金属保温杯壶经打磨抛光完毕后,六轴机器人201将杯壶夹具200移动至下料传送带500的初始端上方,杯壶夹具200与下料夹具501接触后,杯壶夹具200松开抛光完毕的金属保温杯壶,下料夹具501将其夹持住。夹具旋转装置502将下料夹具501进行旋转,将金属保温杯壶垂直于下料传送带500摆放,金属保温杯壶在下料传送带500的带动下送出生产线外进行包装。
[0030]
上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips