
 商标分类
商标分类  商标转让
商标转让 
一种力控磨头装置的制作方法
 2021-01-29 22:01:09|
2021-01-29 22:01:09| 330|
330| 起点商标网
起点商标网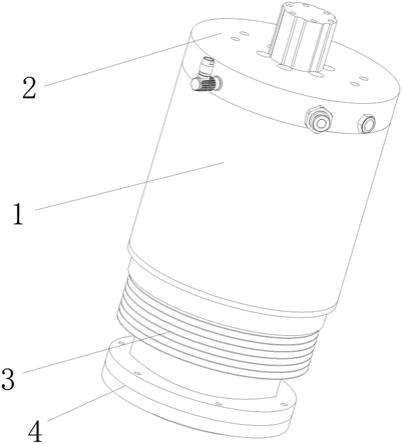
[0001]
本实用新型涉及自动化技术领域,尤其是涉及一种力控磨头装置。
背景技术:
[0002]
对于机器代替人工的自动化表面作业处理,例如表面加工(打磨、抛光)以及工件的处理,为确保整个工艺过程的加工质量,需要恒力进行加工或按沿加工轨迹进行期望力跟踪。对于传统的人工方式,技术工人凭经验来保证质量,同时具有人力成本高,工作环境对人体危害大,加工质量一致性差以及效率低等缺点。
[0003]
对于现代的输出力控制系统,安装于机器人手臂上的加工工具与被加工件进行接触时会产生一种具有冲击波性状的接触力。
[0004]
但对于加工精度要求较高或被加工件表面较为敏感的情况下,会造成被加工件表面出现瑕疵或者破损的情况。因此这种接触时产生的冲击力是应当被消除的。
[0005]
另外,现有的输出力控制系统在高频率干扰的情况下,往往缺乏高动态响应能力,因为其可调节的机构具有一定的惯性,需要相应的反应时间。对于标准的工业机器人,属于刚性系统,轨迹调整过程中即使产生微小的误差,也会造成接触力巨大的偏差,产生不被期望的后果。
[0006]
如中国专利公告号为:cn107009389a,于2017年8月4日公告的一体化主动式恒力补偿装置,主要包括上法兰、伸缩套、主壳体、主轴、主轴滑道、气缸总成、pcb电路板、气压调节阀、电磁阀和倾角传感器装置成。主壳体由外壳顶盖、外壳和下端盖连接构成。伸缩套分别与上法兰和外壳顶盖连接。下端盖上设有电器接口、消音器和进气管。气压调节阀经电磁阀与气缸连接。主轴下部装设在主轴滑道内,主轴滑道内下部装设有带磁环的磁环座,磁环座与主轴下端连接。主轴滑套外固定有位移传感器。气压调节阀、电磁阀、倾角传感器和位移传感器分别通过导线与pcb电路板对应接口连接。该发明虽然使加工工具可以在零冲击的情况下接触到被加工件表面,同时在整个加工过程中能对接触力进行恒定补偿或根据力指令进行实时动态补偿,但是如果供气气压不足,压力调节阀的输出特性也会发生变化,压力调节阀的实际气压输出与理论气压输出存在差异,从而导致工具与被打磨工件表面之间的力补偿不准确,而且该装置不能实时检测到供气气压,如果突然断气,该装置无法及时发出异常报警,可能造成生产损失。
技术实现要素:
[0007]
本实用新型主要是针对现有的力补偿装置会导致工具与被打磨工件表面之间的力补偿不准确,而且现有装置不能实时检测到供气气压,如果突然断气,该装置无法及时发出异常报警,可能造成生产损失的问题,提供一种能够提高工具与被打磨工件表面之间打磨力的控制精度,并且通过压力检测能够及时检测供气异常的力控磨头装置。
[0008]
本实用新型的目的主要是通过下述方案得以实现的:一种力控磨头装置,包括上法兰、伸缩管、主壳体、位移传感器和倾角传感器,所述的主壳体包括顶盖、外壳和下端盖,
位移传感器和倾角传感器均设置在主壳体内,所述的位移传感器包括位移传感器主体和测量端,所述的测量端连接至上法兰上,所述的伸缩管的上端与上法兰连接,所述的伸缩管的下端与顶盖连接,所述的主壳体内设置有气缸、第一比例阀、第二比例阀、压力传感器和呈空心结构的母座,所述的母座内滑动连接有移动轴,所述的移动轴的一端连接至上法兰,所述的气缸的活塞杆连接至上法兰上,所述的气缸内部上气室的进气口与第一比例阀的出气口连接,所述的气缸内部下气室与第二比例阀的出气口连接,所述的下端盖上的供气口分别与压力传感器、第一比例阀的供气口和第二比例阀的供气口连接。主壳体包括顶盖、外壳和下端盖,位移传感器和倾角传感器均设置在主壳体内,位移传感器包括位移传感器主体和测量端,测量端连接至上法兰上,伸缩管的上端与上法兰连接,伸缩管的下端与顶盖连接,主壳体内设置有气缸、第一比例阀、第二比例阀、压力传感器和呈空心结构的母座,第一比例阀和第二比例阀能够给气缸输送一定压力数值的气体,那么气缸就会有特定输出力,母座内滑动连接有移动轴,移动轴的一端连接至上法兰,移动轴的设置能够提高上法兰在移动时的精度,气缸的活塞杆连接至上法兰上,气缸内部上气室的进气口与第一比例阀的出气口连接,气缸内部下气室与第二比例阀的出气口连接,下端盖上的供气口通过三通气管接头分别与压力传感器、第一比例阀的供气口和第二比例阀的供气口连接,压力传感器的设置能够在对第一比例阀和第二比例阀供气前进行气压检测,从而提高第一比例阀和第二比例阀的输出精度,在下端盖设置有航插母座口、进气口和单向过滤器口,航插母座口、进气口和单向过滤器口上分别安装航插母座、隔板接头和单向过滤阀,隔板接头内侧连接三通接头,外侧连接干净稳定的压缩空气,航插母座内侧连接压力传感器、倾角传感器、位移传感器、比例阀的电气接口,外侧通过航插线连接电气柜,单向过滤阀内侧始终连接主壳体内部空气,外侧始终连接外部空气;当伸缩管伸出时,主壳体内部空气压力小于外部空气压力,外部空气通过单向过滤阀被过滤后进入装置内部;当伸缩管压缩时,内部空气压力大于外部空气压力,内部空气通过单向过滤阀不需过滤直接排出装置外侧,电气柜内含有中央处理器、以太网模块、串口模块、多路io模块、3路ad模块和2路da模块,ad模块可以将模拟量电压型号转换成数字量,da模块可以将数字量转换成模拟量电压信号,转换好的数字量通过中央处理器进行算法处理,电气柜通过航插线连接主壳体下端盖,采集压力传感器、位移传感器和倾角传感器的电压信号并通过3路ad模块,将其转换为相应物理量数值,然后根据相应算法对第一比例阀和第二比例阀的输出电压信号从而控制气缸上下气室压力差控制气缸活塞杆运动状态,使得上法兰所连接的工具与被加工零件表面的接触力恒定在设置值,从而通过检测比例阀供气口的气压实时补偿比例阀的实际气压输出值与理论气压输出值之间的偏差从而提高补偿力的精度。
[0009]
作为优选,所述的气缸的数量为两个,两个气缸沿移动轴的轴线对称设置。气缸的数量为两个,两个气缸是并联的,第一比例阀用于给两个气缸的上气室供气,第二比例阀用于给两个气缸的下气室供气,现有的力补偿装置上的气缸与主轴的轴线不为中心对称关系,使得气缸在输出时,对主轴回产生一定的力矩,主轴受到力矩之后会增加主轴与主轴滑道之间的摩擦力,使得气缸输出的力被额外的摩擦力抵消,从而导致工具与被打磨工件表面之间的力补偿不准确,在本设计中两个气缸沿移动轴的轴线对称设置,使得气缸在输出时减小了装置内部摩擦力,从而提高补偿力的精度。
[0010]
作为优选,所述的母座通过定位螺母与移动轴滑动连接。母座通过定位螺母与移
动轴滑动连接,移动轴只能在定位螺母内滑动而不能转动,提高了上法兰移动时的精准性。
[0011]
作为优选,所述的位移传感器主体固定在顶盖上。位移传感器主体固定在顶盖上,结构设计合理。
[0012]
作为优选,所述的倾角传感器通过安装支架固定在顶盖上。倾角传感器通过安装支架固定在顶盖上,安装方便。
[0013]
作为优选,所述的气缸的缸体固定在顶盖上。气缸的缸体固定在顶盖上,结构设计合理。
[0014]
作为优选,所述的第一比例阀和第二比例阀均通过螺钉固定在下端盖上。第一比例阀和第二比例阀均通过螺钉固定在下端盖上,安装方便。
[0015]
作为优选,所述的压力传感器通过扎带固定在母座上。压力传感器通过扎带固定在母座上,由于压力传感器上没有螺丝孔,因此用扎带固定安装十分方便。
[0016]
因此,本实用新型的一种力控磨头装置具备下述优点:本实用新型结构简单,可靠性高,能够提高工具与被打磨工件表面之间打磨力的控制精度,并且通过压力检测能够补偿比例阀输出或者及时报警,气缸的对称式布局在输出时减小了装置内部摩擦力,从而提高了打磨力的控制精度。
附图说明
[0017]
附图1是本实用新型的结构示意图。
[0018]
附图2是本实用新型去掉外壳后的一个角度的主视图。
[0019]
附图3是本实用新型去掉外壳后的另一个角度的主视图。
[0020]
附图4是本实用新型去掉外壳、第一比例阀和第二比例阀后的结构示意图。
[0021]
附图5是本实用新型中移动轴和定位螺母的结构示意图。
[0022]
附图6是本实用新型的控制原理示意图。
[0023]
图示说明:1-外壳,2-下端盖,3-伸缩管,4-上法兰,5-顶盖,6-第一比例阀,7-母座,8-倾角传感器,9-第二比例阀,10-气缸,11-位移传感器,12-压力传感器,13-移动轴,14-定位螺母,15-安装支架。
具体实施方式
[0024]
下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
[0025]
实施例1:
[0026]
如图1、2、3、4、5所示,一种力控磨头装置,包括上法兰4、伸缩管3、主壳体、位移传感器11和倾角传感器8,主壳体包括顶盖5、外壳1和下端盖2,位移传感器11和倾角传感器8均设置在主壳体内,位移传感器11包括位移传感器主体和测量端,测量端成杆状可以在位移传感器主体内移动,测量端连接至上法兰4上,伸缩管3的上端与上法兰4连接,伸缩管3的下端与顶盖5连接,主壳体内设置有气缸10、第一比例阀6、第二比例阀9、压力传感器12和呈空心结构的母座7,第一比例阀6和第二比例阀9能够给气缸10输送一定压力数值的气体,那么气缸10就会有特定输出力,母座7内滑动连接有移动轴13,移动轴13的一端连接至上法兰4,母座7通过定位螺母14与移动轴13滑动连接,移动轴13只能在定位螺母14内滑动而不能转动,提高了上法兰4移动时的精准性,气缸10的活塞杆连接至上法兰4上,气缸10内部上气
室的进气口与第一比例阀6的出气口连接,气缸10内部下气室与第二比例阀9的出气口连接,下端盖2上的供气口通过三通气管接头分别与压力传感器12、第一比例阀6的供气口和第二比例阀9的供气口连接,压力传感器12的设置能够在对第一比例阀6和第二比例阀9供气前进行气压检测,从而提高第一比例阀6和第二比例阀9的输出精度,在下端盖2设置有航插母座7口、进气口和单向过滤器口,航插母座7口、进气口和单向过滤器口上分别安装航插母座7、隔板接头和单向过滤阀,隔板接头内侧连接三通接头,外侧连接干净稳定的压缩空气,航插母座7内侧连接压力传感器12、倾角传感器8、位移传感器11、比例阀的电气接口,外侧通过航插线连接电气柜,单向过滤阀内侧始终连接主壳体内部空气,外侧始终连接外部空气;当伸缩管3伸出时,主壳体内部空气压力小于外部空气压力,外部空气通过单向过滤阀被过滤后进入装置内部;当伸缩管3压缩时,内部空气压力大于外部空气压力,内部空气通过单向过滤阀不需过滤直接排出装置外侧,电气柜内含有中央处理器、以太网模块、串口模块、多路io模块、3路ad模块和2路da模块,ad模块可以将模拟量电压型号转换成数字量,da模块可以将数字量转换成模拟量电压信号,转换好的数字量通过中央处理器进行算法处理。
[0027]
如图6所示,电气柜通过航插线连接主壳体下端盖2,采集压力传感器12、位移传感器11和倾角传感器8的电压信号并通过3路ad模块,将其转换为相应物理量数值,然后根据相应算法对第一比例阀6和第二比例阀9的输出电压信号从而控制气缸10上下气室压力差控制气缸10活塞杆运动状态,使得上法兰4所连接的工具与被加工零件表面的接触力恒定在设置值,从而通过检测比例阀供气口的气压实时补偿比例阀的实际气压输出值与理论气压输出值之间的偏差从而提高补偿力的精度。
[0028]
气缸10的数量为两个,两个气缸10是并联的,第一比例阀6用于给两个气缸10的上气室供气,第二比例阀9用于给两个气缸10的下气室供气,现有的力补偿装置上的气缸10与主轴的轴线不为中心对称关系,使得气缸10在输出时,对主轴回产生一定的力矩,主轴受到力矩之后会增加主轴与主轴滑道之间的摩擦力,使得气缸10输出的力被额外的摩擦力抵消,从而导致工具与被打磨工件表面之间的力补偿不准确,在本设计中两个气缸10沿移动轴13的轴线对称设置,使得气缸10在输出时减小了装置内部摩擦力,从而提高补偿力的精度。
[0029]
位移传感器主体固定在顶盖5上,气缸10的缸体固定在顶盖5上,结构设计合理。
[0030]
倾角传感器8通过安装支架15固定在顶盖5上,第一比例阀6和第二比例阀9均通过螺钉固定在下端盖2上,安装方便。
[0031]
压力传感器12通过扎带固定在母座上,由于压力传感器12上没有螺丝孔,因此用扎带固定安装十分方便。
[0032]
应理解,该实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips