
 商标分类
商标分类  商标转让
商标转让 
一种随动式折弯机夹具的制作方法
 2021-01-29 15:01:14|
2021-01-29 15:01:14| 308|
308| 起点商标网
起点商标网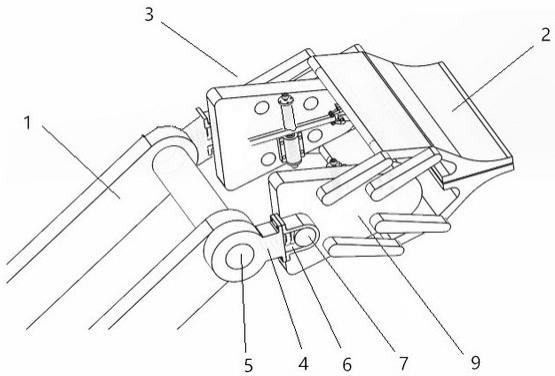
[0001]
本实用新型涉及一种夹具,特别是一种随动式折弯机夹具。
背景技术:
[0002]
在钣金加工中,折弯机是一种常用的大型机械。现阶段工厂中普遍采用传统的加工方式:由工人手脚协调进行工作,脚下控制刀具下落的速度,双手跟随工件运动轨迹移动。
[0003]
这种工作方式,对工人的工作经验要求很高,如果工人双手与工件不能紧密贴合,由于钢板自身重量,钢板会在折弯过程中变形,导致钢板加工精度变差,甚至坏件,而且当需要批量精密折弯时要求每一个工件的精度和一致度更高。传统工作方式难以达到工件的精度和一致度要求。
[0004]
因此现代折弯机一般都会配用机械手来代替人手辅助自动化系统,代替人手完成折弯工序,速度更快,角度更精准,效率更高。
[0005]
而现在工厂中很多折弯机数控系统没有实时运动参数和机械手联动功能,利用机械手后编程序会和折弯机产生位置和角度误差。也就无法实现自动、高效的折弯。因此现在需要一种能够解决上述问题的方法或装置。
技术实现要素:
[0006]
本实用新型是为了解决现有技术所存在的上述不足,提出一种结构简单,设计巧妙,布局合理,能够自动对折弯过程中的位置和角度变化进行缓冲以及检测,并根据上述变化进行适应性调整的随动式折弯机夹具。
[0007]
本实用新型的技术解决方案是:一种随动式折弯机夹具,其特征在于:所述夹具由机械手臂1、夹具体2以及二者之间的连接机构3组成,
[0008]
所述的连接机构3包括两个对称分布的第一连接件4,所述第一连接件4通过第一转轴5与机械手臂1的端部相铰接,在第一连接件4上开设有长槽6,所述长槽6内滑动连接有第二转轴7,同时在长槽6内还设置有顶在其内壁和第二转轴7之间的弹簧8,在长槽6内还设置有距离传感器,所述第一连接件4还通过滑槽滑块机构与第二连接件9滑动连接,所述第一连接件4和第二连接件9能够沿着长槽6的长度方向做往复的相对直线运动,所述第二转轴7活动穿接在第二连接件9上,在第二转轴7的自由端连接有角度摆杆10,在第二连接件9上设置有与所述角度摆杆10的自由端相匹配的角度传感器11,同时在第二连接件9上还设置有两个以角度摆杆10为中心轴对称分布的缓冲弹簧12,所述第二连接件9的末端与夹具体2相连。
[0009]
本实用新型同现有技术相比,具有如下优点:
[0010]
本种结构形式的折弯机夹具,其结构简单,设计巧妙,它针对传统的折弯机用夹具在使用过程中所存在的种种问题,在机械手和夹具体之间设置了一个特殊结构的连接机构,这个连接机构同时具有角度缓冲和位置缓冲两种缓冲功能,能够在工作过程中吸收一
定范围内的角度误差和位置误差,从而保证本夹具中的夹具体能够在折弯过程中精准地对工件进行扶持,同时,它还可以实时地监测上述的角度误差和位置误差,如果误差过大(连接机构无法补偿),则会将误差的相关参数传递给机械手的控制系统,由控制系统转换成角度信息和位移信息并做出相应的修正,从而起到自动补偿和修正的作用。它的适用性好,可安装在任何型号的压弯机上,适用于各种标准刀具;折弯精度高,工作稳定,大批量产品一致性好;扩展性好,自适应能力强,可以通过工作中修正信息统筹记忆,进行升级。同时,这种随动式的夹具的制作工艺简单,制造成本低廉,因此可以说它具备了多种优点,特别适合于在本领域中推广应用,其市场前景十分广阔。
附图说明
[0011]
图1是本实用新型实施例的立体结构示意图。
[0012]
图2是本实用新型实施例的局部视图。
具体实施方式
[0013]
下面将结合附图说明本实用新型的具体实施方式。如图1、图2所示:一种随动式折弯机夹具,它由机械手臂1、夹具体2以及二者之间的连接机构3组成,
[0014]
所述的连接机构3包括两个对称分布的第一连接件4,所述第一连接件4通过第一转轴5与机械手臂1的端部相铰接,在第一连接件4上开设有长槽6,所述长槽6内滑动连接有第二转轴7,同时在长槽6内还设置有顶在其内壁和第二转轴7之间的弹簧8,在长槽6内还设置有距离传感器,所述第一连接件4还通过滑槽滑块机构与第二连接件9滑动连接,所述第一连接件4和第二连接件9能够沿着长槽6的长度方向做往复的相对直线运动,所述第二转轴7活动穿接在第二连接件9上,在第二转轴7的自由端连接有角度摆杆10,在第二连接件9上设置有与所述角度摆杆10的自由端相匹配的角度传感器11,同时在第二连接件9上还设置有两个以角度摆杆10为中心轴对称分布的缓冲弹簧12,所述第二连接件9的末端与夹具体2相连。
[0015]
本实用新型实施例的随动式折弯机夹具的工作过程如下:首先利用夹具体2夹紧需要进行折弯处理的工件(板材),然后向折弯机发出指令,折弯机开始进行冲压折弯操作,折弯机冲击工件后,工件会发生折弯,工件发生折弯动作的全过程中,本夹具始终夹持着工件并随着工件的动作而运动,扶持着工件以防止其在自身重力的作用下发生变形;
[0016]
如果在上述动作的过程中,工件在空间上的位置出现误差,或者摆动的角度出现误差,如果误差不大,本夹具中的连接机构能够弥补这种误差,机械手臂1不需要做任何动作,如果误差过大,本夹具中的连接机构无法弥补,则会对上述两种误差的具体参数进行测量,并将测量结果发送到机械手臂1的控制系统中,机械手臂1做出相应的动作,进而弥补这种误差;
[0017]
当工件在空间上的位置出现误差时,由于机械手臂1相对不动,因此直接与夹具体2相连的第二连接件9会与直接与机械手臂1相连的第一连接件4之间发生相对运动,即第二转轴7在长槽6内滑动,弹簧8被压缩,而距离传感器则会实时的对二者之间的相对位移量进行检测,并将检测结果发送到本装置机械手臂1的控制系统中,如果第一连接件4和第二连接件9之间的相对位移量不大(在长槽6的范围内),则机械手臂1不需要动作,如果相对位移
量较大,控制系统便会向机械手臂1发出信号,控制机械手臂1做出相应方向的动作,从而保证夹具体2不会对工件施加以除了扶持之外的力量;
[0018]
当工件在摆动角度上出现误差时,由于机械手臂1相对不动,因此直接与夹具体2相连的第二连接件9会与直接与机械手臂相连的第一连接件4之间发生相对摆动,即第二连接件9与角度摆杆10之间发生相对摆动,在此过程中,角度传感器11始终检测角度摆杆10的摆动角度,同时缓冲弹簧12也会顶在摆动的角度摆杆10上,对其进行缓冲和辅助支撑,如果摆动角度不大(在角度摆杆10最大摆动范围内),则机械手臂1不需要动作,如果摆动角度过大,控制系统便会向机械手臂1发出信号,控制机械手臂1做出相应方向的摆动,从而保证夹具体2不会对工件施加以除了扶持之外的力量。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips