
 商标分类
商标分类  商标转让
商标转让 
利用导向板实现焊接球快速定位的焊接平台及其控制方法与流程
 2021-01-29 15:01:32|
2021-01-29 15:01:32| 293|
293| 起点商标网
起点商标网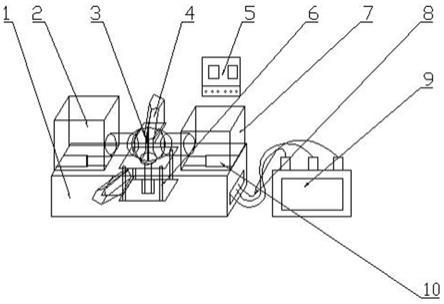
[0001]
本发明涉及焊接球焊接技术领域,具体涉及一种利用导向板实现焊接球快速定位的焊接平台及其控制方法。
背景技术:
[0002]
焊接空心球节点是由两个热冲压钢半球加肋或不加肋焊接成空心球的连接节点。焊接时,球体作轴向运动,焊枪位于球体顶部平焊位置焊接。为了保持焊缝熔池在焊接过程中一直处于水平位置,球体转动必须为直线的轴向,但球体各个方向都为弧面,将球体装夹到转动装置上并能固定好焊缝轴向,操作时具有一定的难度,要花费大量的时间。
技术实现要素:
[0003]
本发明主要解决现有技术中存在运行稳定性差和效率低的不足,提供了一种利用导向板实现焊接球快速定位的焊接平台及其控制方法,其具有结构简单、运行稳定性好和效率高的特点。解决了球体装夹焊接难度大的问题。提高了工作效率和产品质量。
[0004]
本发明的上述技术问题主要是通过下述技术方案得以解决的:一种利用导向板实现焊接球快速定位的焊接平台,包括机架,所述的机架上端设有焊接球,所述的焊接球与机架间设有高度调整架,所述的焊接球左端设有与焊接球相活动式触接的主动机构,所述的焊接球右端设有与焊接球相活动式触接的从动机构,所述的从动机构与机架间、主动机构与机架间均设有纵向位移油缸,所述的焊接球前后端设有焊缝轴向导向板机构。
[0005]
作为优选,所述的焊缝轴向导向板机构包括一对位于焊接球前后端的焊缝轴向轴导向板,所述的焊缝轴向轴导向板与机架间设有导向板底座,所述的焊缝轴向轴导向板后端均设有与导向板底座相螺栓固定的轴向油缸。
[0006]
作为优选,所述的焊缝轴向轴导向板与导向板底座间设有与焊缝轴向轴导向板相活动式插嵌的滑轨。
[0007]
作为优选,所述的机架侧边设有液压站,所述的液压站与纵向位移油缸间、液压站与轴向油缸间、液压站与高度调整架间均设有油管。
[0008]
作为优选,所述的机架上设有分别与主动机构、液压站相电路连通控制箱。
[0009]
作为优选,所述的高度调整架包括下底板,所述的下底板与焊接球间设有高度调整托板,所述的高度调整托板与下底板间设有与油管相连通的高度调节油缸。
[0010]
作为优选,所述的高度调节油缸外围设有若干呈等间距环形分布且延伸出高度调整托板的导向柱。
[0011]
作为优选,所述的主动机构包括伺服电机,所述的从动机构包括从动箱,所述的从动箱与焊接球间、伺服电机与焊接球间均设有传动轴,所述的伺服电机与传动轴间设有减速箱,所述的传动轴与焊接球间均设有若干夹爪。
[0012]
作为优选,所述的利用导向板实现焊接球快速定位的焊接平台的控制方法,包括
如下操作步骤:第一步:开启高度调整架上的高度调节油缸将高度调整托板升至所需位置。
[0013]
第二步:根据不同焊接球直径,调整焊缝轴向轴导向板的位置,将焊接球吊装到焊缝轴向轴导向板上方位置并且慢慢落下,落下过程焊缝轴向轴导向板的楔形面插入到焊接球的焊缝坡口中,达到纠偏作用,使焊缝处于同一直线,焊接球落到高度调整托板的圆管上。
[0014]
第三步:采用纵向位移油缸调整主动机构和从动机构的间距位置,直至两侧夹爪夹持到位后停止并锁紧。
[0015]
第四步:控制轴向油缸,将焊缝轴向轴导向板移开至不影响焊接位置。
[0016]
第五步:降下高度调整架。
[0017]
第六步:根据焊接参数,启动主动机构的伺服电机,此时焊接球开始旋转,实现自动焊接。
[0018]
第七步:焊接完成后,顶升高度调整架将焊接球托住,接着松开两侧夹爪。
[0019]
第八步:将焊接球从平台吊下,再重复第一步至第七步的操作。
[0020]
本发明能够达到如下效果:本发明提供了一种利用导向板实现焊接球快速定位的焊接平台及其控制方法,与现有技术相比较,具有结构简单、运行稳定性好和效率高的特点。解决了球体装夹焊接难度大的问题。提高了工作效率和产品质量。
附图说明
[0021]
图1是本发明的结构示意图。
[0022]
图2是本发明的结构爆炸图。
[0023]
图3是本发明中的焊缝轴向导向板机构的结构示意图。
[0024]
图中:机架1,主动机构2,焊接球3,焊缝轴向导向板机构4,控制箱5,高度调整架6,从动机构7,油管8,液压站9,纵向位移油缸10,伺服电机11,减速箱12,传动轴13,夹爪14,从动箱15,高度调整托板16,导向柱17,高度调节油缸18,下底板19,轴向油缸20,焊缝轴向轴导向板21,滑轨22,导向板底座23。
具体实施方式
[0025]
下面通过实施例,并结合附图,对发明的技术方案作进一步具体的说明。
[0026]
实施例:如图1、图2和图3所示,一种利用导向板实现焊接球快速定位的焊接平台,包括机架1,机架1侧边设有液压站9,液压站9与纵向位移油缸10间、液压站9与轴向油缸20间、液压站9与高度调整架6间均设有油管8。机架1上设有分别与主动机构2、液压站9相电路连通控制箱5。机架1上端设有焊接球3,焊接球3与机架1间设有高度调整架6,高度调整架6包括下底板19,下底板19与焊接球3间设有高度调整托板16,高度调整托板16与下底板19间设有与油管8相连通的高度调节油缸18。高度调节油缸18外围设有4个呈等间距环形分布且延伸出高度调整托板16的导向柱17。焊接球3左端设有与焊接球3相活动式触接的主动机构2,焊接球3右端设有与焊接球3相活动式触接的从动机构7,从动机构7与机架1间、主动机构2与机架1间均设有纵向位移油缸10,主动机构2包括伺服电机11,从动机构7包括从动箱15,
从动箱15与焊接球3间、伺服电机11与焊接球3间均设有传动轴13,伺服电机11与传动轴13间设有减速箱12。传动轴13与焊接球3间均设有3个夹爪14。焊接球3前后端设有焊缝轴向导向板机构4。焊缝轴向导向板机构4包括一对位于焊接球3前后端的焊缝轴向轴导向板21,焊缝轴向轴导向板21与机架1间设有导向板底座23,焊缝轴向轴导向板21后端均设有与导向板底座23相螺栓固定的轴向油缸20。焊缝轴向轴导向板21与导向板底座23间设有与焊缝轴向轴导向板21相活动式插嵌的滑轨22。
[0027]
利用导向板实现焊接球快速定位的焊接平台及其控制方法包括如下操作步骤:第一步:开启高度调整架6上的高度调节油缸18将高度调整托板16升至所需位置。
[0028]
第二步:根据不同焊接球3直径,调整焊缝轴向轴导向板21的位置,将焊接球3吊装到焊缝轴向轴导向板21上方位置并且慢慢落下,落下过程焊缝轴向轴导向板21的楔形面插入到焊接球3的焊缝坡口中,达到纠偏作用,使焊缝处于同一直线,焊接球3落到高度调整托板6的圆管上。
[0029]
第三步:采用纵向位移油缸10调整主动机构2和从动机构7的间距位置,直至两侧夹爪14夹持到位后停止并锁紧。
[0030]
第四步:控制轴向油缸20,将焊缝轴向轴导向板21移开至不影响焊接位置。
[0031]
第五步:降下高度调整架6。
[0032]
第六步:根据焊接参数,启动主动机构2的伺服电机11,此时焊接球3开始旋转,实现自动焊接。
[0033]
第七步:焊接完成后,顶升高度调整架6将焊接球3托住,接着松开两侧夹爪14。
[0034]
第八步:将焊接球3从平台吊下,再重复第一步至第七步的操作。
[0035]
综上所述,该利用导向板实现焊接球快速定位的焊接平台及其控制方法,具有结构简单、运行稳定性好和效率高的特点。解决了球体装夹焊接难度大的问题。提高了工作效率和产品质量。
[0036]
以上所述仅为本发明的具体实施例,但本发明的结构特征并不局限于此,任何本领域的技术人员在本发明的领域内,所作的变化或修饰皆涵盖在本发明的专利范围之中。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips