
 商标分类
商标分类  商标转让
商标转让 
一种双运动平台的高速高精度加工方法与流程
 2021-01-29 15:01:35|
2021-01-29 15:01:35| 410|
410| 起点商标网
起点商标网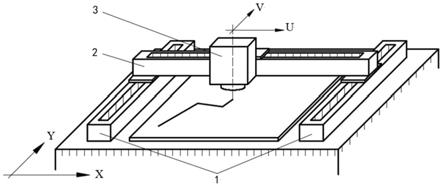
[0001]
本发明涉及双运动平台的运动算法技术领域,具体涉及一种搭载uv运动平台的双运动平台的高速高精度加工方法,可应用于各类搭载xy运动平台的机床,例如平面切割机床等。
背景技术:
[0002]
目前市面上常见的平面切割机床如激光切割机或皮革切割机,大多使用xy运动平台实现平面移动,具有较大的行程,但惯性大,加速度性能一般,提速较慢。当xy运动平台执行轨迹间的拐角处时,因为在拐角处方向突变,为了保证运动的准确,会在拐点处把速度减少至零,再沿着新的方向进行加速。若短小轨迹段多,xy运动平台的速度将提不上去,运动时间剧增,无法实现高速加工。
[0003]
针对xy运动平台等在拐角处速度慢的问题,专家学者提出拐角平滑过渡概念,平滑过渡方法大致分为直接过渡法和曲线过渡法,通过改变拐角处的运动轨迹,插入一段直线或曲线,实现速度和加速度的平滑转接,提高机床在拐角处的速度,提高运动效率。这种方法有一定效果,但是因为修改了原有运动轨迹,产生了误差,牺牲了加工精度;并且为了控制误差,使得速度和效率的实际提升效果一般,对比不采取拐角过渡算法,误差控制在0.02mm,优化效率最高只达到10%左右。
技术实现要素:
[0004]
本发明的目的是提供一种双运动平台的高速高精度加工方法,用以克服现有xy运动平台无法同时实现高速度与高精度的问题。
[0005]
为了实现上述任务,本发明采用以下技术方案:
[0006]
一种双运动平台的高速高精度加工方法,包括以下步骤:
[0007]
在搭载xy运动平台的机床上串联一个uv运动平台以构成双运动平台结构;利用高速高精度算法对xy运动平台的运动轨迹数据进行处理,输出xy运动平台的位移插补点序列和uv运动平台的位移插补点序列,以控制两个运动平台同步合成运动,实现高速高精度加工;所述高速高精度算法包括:
[0008]
步骤1,算法流程初始化
[0009]
设定机床的各类参数,包括xy运动平台的性能参数和uv运动平台的性能参数;创建缓存组,缓存组包括xy运动平台输出缓存、合成运动输出缓存、时间参数缓存和速度缓存,所有缓存在创建后均设置为空;
[0010]
获取机床的工作任务,所述工作任务通过使xy运动平台以设定的轨迹队列运动来完成,轨迹队列中顺序存储有多段轨迹信息;
[0011]
步骤2,对单段轨迹进行轨迹规划
[0012]
从所述轨迹队列中读取一段轨迹信息,计算当前读取的轨迹信息的最大速度,分别结合xy运动平台的性能参数和uv运动平台的性能参数,计算出针对于所述轨迹信息的两
组滤波器时间参数组,构造出两个滤波器链组,分别使用两个滤波器链组对所述轨迹信息进行轨迹规划,得到xy运动平台的位移插补点序列和合成运动的位移插补点序列,并在合成运动的位移插补点序列的首尾插入延时段序列;
[0013]
步骤3,缓存的检查与缓存过程
[0014]
检查xy运动平台输出缓存、合成运动输出缓存是否为空,若两个缓存均为空,跳到步骤6,否则执行下一步;
[0015]
步骤4,对相邻轨迹进行矢量过渡
[0016]
根据缓存组中上一段轨迹信息的两组滤波器时间参数与当前读取的轨迹信息的两组滤波器时间参数,计算这两段轨迹信息的位移插补点叠加的数量;
[0017]
对上一段轨迹信息和当前读取的轨迹信息行矢量过渡;
[0018]
步骤5,位移插补点的输出
[0019]
把xy运动平台输出缓存中的位移插补点序列作为xy运动平台的位移插补点进行输出;把合成运动输出缓存中的位移插补点顺序地与xy运动输出缓存中的位移插补点序列进行矢量相减,把相减后的位移插补点作为uv运动平台的位移插补点进行输出;
[0020]
清空xy运动平台输出缓存与合成运动输出缓存;
[0021]
步骤6,将xy运动平台的位移插补点序列存入xy运动平台输出缓存,合成运动的位移插补点序列存入合成运动输出缓存,两组滤波器时间参数存入时间参数缓存,轨迹信息的最大速度存入速度缓存;
[0022]
步骤7,检查轨迹信息队列有无下一段轨迹信息,若有下一段轨迹信息,跳回到步骤2;若无下一段轨迹信息,执行步骤5。
[0023]
进一步地,所述uv运动平台可以在u轴方向和v轴方向运动,所述u轴方向平行于xy运动平台的x轴方向,v轴方向平行于xy运动平台的y轴方向。
[0024]
进一步地,所述对上一段轨迹信息和当前读取的轨迹信息行矢量过渡,具体为:
[0025]
取出当前轨迹信息的xy运动平台位移插补点序列首部同等数量的位移插补点,计算相应的位移向量,并顺序地与xy运动平台输出缓存中的上一段轨迹信息的位移插补点序列尾部同等数量的位移插补点进行矢量叠加;同时,取出当前轨迹信息的合成运动的位移插补点序列首部同等数量的位移插补点,计算相应的位移向量,并顺序地与合成运动输出缓存中的上一段轨迹信息的合成运动的位移插补点序列尾部同等数量的位移插补点进行矢量叠加。
[0026]
进一步地,基于相邻轨迹信息的类型为圆弧或直线,所述矢量过渡分为直线间过渡,圆弧间过渡和直线圆弧过渡三种情况。
[0027]
进一步地,所述机床为激光切割机,激光切割机的xy运动平台包括床身以及平行设置在所述床身上的一对y轴直线伺服电机,在所述一对y轴直线伺服电机上安装有x轴直线伺服电机;
[0028]
所述uv运动平台为安装于所述x轴直线伺服电机上的二轴激光振镜模组,所述xy运动平台用于驱动激光振镜模组沿x轴和y轴方向运动,从而使激光振镜模组射出的激光焦点在平面上大幅面运动;二轴激光振镜模组中设置有两个伺服电机,通过所述两个伺服电机驱动控制激光反射镜片的角度,使得激光焦点在平面上沿着u轴和v轴方向运动,实现激光焦点在平面的较小范围内高速运动。
[0029]
在上述技术方案的基础上,本发明进一步提供了:
[0030]
一种基于双运动平台的高速高精度加工机床,所述机床上搭载有xy运动平台,且在xy运动平台上串联一个uv运动平台以构成双运动平台结构;
[0031]
所述机床还包括高速高精度算法模块,利用高速高精度算法模块对xy运动平台的运动轨迹数据进行处理,输出xy运动平台的位移插补点序列和uv运动平台的位移插补点序列,以控制两个运动平台同步合成运动,实现高速高精度加工;所述高速高精度算法模块包括:
[0032]
初始化单元,用于设定机床的各类参数,包括xy运动平台的性能参数和uv运动平台的性能参数;创建缓存组,缓存组包括xy运动平台输出缓存、合成运动输出缓存、时间参数缓存和速度缓存,所有缓存在创建后均设置为空;获取机床的工作任务,所述工作任务通过使xy运动平台以设定的轨迹队列运动来完成,轨迹队列中顺序存储有多段轨迹信息;
[0033]
轨迹规划单元,从所述轨迹队列中读取一段轨迹信息,计算当前读取的轨迹信息的最大速度,分别结合xy运动平台的性能参数和uv运动平台的性能参数,计算出针对于所述轨迹信息的两组滤波器时间参数组,构造出两个滤波器链组,分别使用两个滤波器链组对所述轨迹信息进行轨迹规划,得到xy运动平台的位移插补点序列和合成运动的位移插补点序列,并在合成运动的位移插补点序列的首尾插入延时段序列;
[0034]
缓存检查单元,用于检查xy运动平台输出缓存、合成运动输出缓存是否为空,若两个缓存均为空,跳到数据缓存单元,否则跳转至矢量过渡单元;
[0035]
矢量过渡单元,用于根据缓存组中上一段轨迹信息的两组滤波器时间参数与当前读取的轨迹信息的两组滤波器时间参数,计算这两段轨迹信息的位移插补点叠加的数量;对上一段轨迹信息和当前读取的轨迹信息行矢量过渡;
[0036]
位移插补点输出单元,用于把xy运动平台输出缓存中的位移插补点序列作为xy运动平台的位移插补点进行输出;把合成运动输出缓存中的位移插补点顺序地与xy运动输出缓存中的位移插补点序列进行矢量相减,把相减后的位移插补点作为uv运动平台的位移插补点进行输出;清空xy运动平台输出缓存与合成运动输出缓存;
[0037]
数据缓存单元,用于将xy运动平台的位移插补点序列存入xy运动平台输出缓存,合成运动的位移插补点序列存入合成运动输出缓存,两组滤波器时间参数存入时间参数缓存,轨迹信息的最大速度存入速度缓存;
[0038]
检查跳转单元,用于检查轨迹信息队列有无下一段轨迹信息,若有下一段轨迹信息,跳回到轨迹规划单元;若无下一段轨迹信息,跳转至位移插补点输出单元。
[0039]
一种应用于基于双运动平台的高速高精度加工机床的控制器,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,处理器执行计算机程序时实现所述初始化单元、轨迹规划单元、缓存检查单元、矢量过渡单元、位移插补点输出单元、数据缓存单元、检查跳转单元中的步骤。
[0040]
一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,其特征在于,计算机程序被处理器执行时实现所述初始化单元、轨迹规划单元、缓存检查单元、矢量过渡单元、位移插补点输出单元、数据缓存单元、检查跳转单元中的步骤。
[0041]
与现有技术相比,本发明具有以下技术特点:
[0042]
本发明在xy运动平台上串联耦合一个具有高速高加速度的uv运动平台,并基于此
提供一种高速高精度的加工算法,统筹两个平台的同步运动,完成两个平台的合理运动分配,使大行程的xy运动平台能高速运动,使高速高加速度的uv运动平台能配合xy运动平台运动,通过运动合成还原高精度的轨迹,实现高速高精度加工,有效克服了现有技术无法同时实现高速度与高精度的问题。
附图说明
[0043]
图1为将本发明方法应用于激光切割机上时的结构示意图;
[0044]
图2为三次滤波效果示意图;
[0045]
图3为不同拐角类型的示意图。
[0046]
图4为直线间过渡示意图;
[0047]
图5为圆弧间过渡示意图;
[0048]
图6为矢量过渡的效果图;
[0049]
图7为运动合成的效果图;
[0050]
图8为测试图形。
[0051]
图中标号说明:1y轴直线伺服电机,2x轴直线伺服电机,3激光振镜模组。
具体实施方式
[0052]
本发明公开了一种双运动平台的高速高精度加工方法,在搭载xy运动平台的机床上串联一个uv运动平台以构成双运动平台结构;利用高速高精度算法对xy运动平台的运动轨迹数据进行处理,输出xy运动平台的位移插补点序列和uv运动平台的位移插补点序列,以控制两个运动平台同步运动,实现高速高精度加工;本方案中,双运动平台可以是例如搭载激光振镜模组的激光切割机。
[0053]
参见图1,为将本发明方法应用于激光切割机上时的结构示意图;在该示例中,机床为激光切割机,激光切割机的xy运动平台包括床身以及平行设置在所述床身上的一对y轴直线伺服电机,在所述一对y轴直线伺服电机上安装有x轴直线伺服电机;
[0054]
所述uv运动平台为安装于所述x轴直线伺服电机上的二轴激光振镜模组,所述xy运动平台用于驱动激光振镜模组沿x轴和y轴方向运动,从而使激光振镜模组射出的激光焦点在平面上大幅面运动;二轴激光振镜模组中设置有两个伺服电机,通过所述两个伺服电机驱动控制激光反射镜片的角度,使得激光焦点在平面上沿着u轴和v轴方向运动,实现激光焦点在平面的较小范围内高速运动;uv轴方向与xy轴方向重合,即所述u轴方向平行于x轴方向,v轴方向平行于y轴方向;激光切割机拥有uv两个冗余直线自由度,对于给定轨迹存在不唯一的运动组合,可实现x、y、u、v轴之间的运动合理分配调整。
[0055]
针对图1所示的激光切割机,在执行切割任务时,需要输入一个轨迹队列,队列中顺序存储着若干个轨迹的数据信息,轨迹信息可以为直线或圆弧;激光切割机通过按照轨迹队列进行切割,以完成切割任务。本方案提供的算法用于对输入的运动轨迹数据进行处理,输出xy运动平台的位移插补点序列和激光振镜模组的位移插补点序列,xy运动平台的位移插补点序列控制xy运动平台快速通过拐角,从而使得机床能高速运动;同时,激光振镜模组的位移插补点序列控制二轴激光振镜模组配合xy运动平台运动,通过双运动平台的合成运动完美加工出输入的轨迹数据,从而使得机床能高精度运动。
[0056]
下面结合具体实施例对本发明提供的高速高精度算法进行详细说明。
[0057]
所述高速高精度算法包括:
[0058]
步骤1,算法流程初始化
[0059]
设定机床的各类参数,包括xy运动平台的性能参数和uv运动平台的性能参数;创建缓存组,缓存组包括xy运动平台输出缓存、合成运动输出缓存、时间参数缓存和速度缓存,所有缓存在创建后均设置为空;
[0060]
获取机床的工作任务,所述工作任务通过使xy运动平台以设定的轨迹队列运动来完成,轨迹队列中顺序存储有多段轨迹信息。
[0061]
在本发明的实施例中,激光切割机的各类参数包括:插补周期t
c
;根据xy运动平台的运动性能,设定机床的极限速度v
l
、极限加速度a
l
、极限加加速度j
l
和极限加速度斜率d
l
;根据激光振镜模组的运动性能,设定合成运动的极限加速度a
h
、极限加加速度j
h
、极限加加速度斜率d
h
和工作范围w。创建xy运动平台输出缓存、合成运动输出缓存、时间参数缓存和速度缓存,所有缓存在创建后均设置为空。
[0062]
步骤2,对单段轨迹进行轨迹规划
[0063]
从所述轨迹队列中读取一段轨迹信息,计算当前读取的轨迹信息的最大速度,分别结合xy运动平台的性能参数和uv运动平台的性能参数,计算出针对于所述轨迹信息的两组滤波器时间参数,构造出两个滤波器链组,分别使用两个滤波器链组对所述轨迹信息进行轨迹规划,得到xy运动平台的位移插补点序列和合成运动的位移插补点序列,并在合成运动的位移插补点序列的首尾插入延时段序列。
[0064]
仍以图1所示的激光切割机为例,说明对单段轨迹规划的过程,包括以下步骤:
[0065]
步骤2.1,从轨迹队列中读取一段轨迹信息作为当前轨迹信息,获得当前轨迹信息的长度l;基于l,采用式1计算当前轨迹信息的最大速度v
max
:
[0066][0067]
设当前轨迹信息的基于xy运动平台最大加速度为a
b
、最大加加速度j
b
和加加速度斜率d
b
,并令a
b
=a
l
、j
b
=j
l
、d
b
=d
l
。基于v
max
、a
b
、j
b
和d
b
,采用式2、式3、式4,计算时间参数t1、t2、t3,组成当前轨迹信息的滤波器时间参数组:
[0068][0069][0070][0071]
式中,int[]为向下取整函数;
[0072]
若t1<t2+t3,基于v
max
和d
b
,采用式5和式6减小当前轨迹信息的a
b
和j
b
,具体为:
[0073]
v
max
代入式中v,d
b
代入式中d,计算得到的a作为当前轨迹的a
b
,计算得到的j作为当前轨迹的j
b
。并用式2,式3,式4重新计算t1、t2、t3。
[0074][0075][0076]
式中,v为代入的最大速度;d为代入的加加速度斜率;计算得到的a作为减小后的最大加速度;计算得到的j作为减小后的最大加加速度。
[0077]
若t2<t3,基于a
b
和d
b
,采用式7减少当前轨迹的j
b
:a
b
代入式中a,d
b
代入式中d,计算得到的j作为当前轨迹的j
b
。并用式3,式4重新计算t2、t3。
[0078][0079]
式中,a为代入的最大加速度;d为代入的加加速度斜率;计算得到的j作为减小后的最大加加速度输出。
[0080]
类似地,设当前轨迹的基于合成运动最大加速度a
h
、最大加加速度j
h
和加加速度斜率d
h
,令a
h
=a
h
、j
h
=j
h
、d
h
=d
h
。基于v
max
、a
h
、j
h
和d
h
,采用式8、式9、式10计算时间参数t4、t5、t6,组成当前轨迹的合成运动滤波器时间参数组:
[0081][0082][0083][0084]
若t4<t5+t6,基于v
max
和d
h
,采用通用公式的式5和式6减小当前轨迹的a
h
和j
h
:v
max
代入式中v,d
h
代入式中d,计算得到的a作为当前轨迹的a
h
,计算得到的j作为当前轨迹的j
h
。并用式8,式9,式10重新计算t4、t5、t6。
[0085]
若t5<t6,基于a
h
和d
h
,采用通用公式的式7调整当前轨迹的j
h
:a
h
代入式中a,d
h
代入式中d,计算得到的j作为当前轨迹的j
h
。并用式9、式10重新计算t5、t6。
[0086]
在该步骤中,计算得到当前轨迹的两组滤波器时间参数,分别为xy运动平台滤波器时间参数组t1、t2、t3和合成运动滤波器时间参数组t4、t5、t6。因为存在一些轨迹长度较短,轨迹的最大速度v
max
无法提速到机床的极限速度v
l
,需要减少当前轨迹的加速度或加加速度,令减少后计算得到的t1、t2、t3、t4、t5、t6满足关系:t1≥t2+t3∩t2≥t3,以及t4≥t5+t6∩t5≥t6[0087]
步骤2.2,基于l,采用式11计算当前轨迹信息的插补点数n:
[0088][0089]
基于当前轨迹信息,采用以速度v
max
作匀速规划,插补计算得到当前轨迹的匀速规划位移插补点序列s(n),n表示在序列中的第n个插补点,n=0,1,2,...,n。匀速规划的具体插补计算不在本文赘述。
[0090]
基于时间参数t1、t2、t3、t4、t5和t6,采用式12构造fir(finite impulse response,有限脉冲响应)滤波器:
[0091][0092]
式中,i=1,2,3,4,5,6。h1(n)、h2(n)、h3(n)组成当前轨迹的xy运动平台滤波器链组,h4(n)、h5(n)、h6(n)组成当前轨迹的合成运动滤波器链组。
[0093]
基于h1(n)、h2(n)、h3(n)组成的xy运动平台滤波器链组,对序列s(n)进行轨迹规划,得到当前轨迹在xy运动平台上的位移插补点序列s
b
(n),具体过程如下:
[0094]
用h1(n)对s(n)进行第一次滤波,得到一次滤波输出s1(n);用h2(n)对s1(n)进行第二次滤波,得到二次滤波输出s2(n);用h3(n)对s2(n)进行第三次滤波,得到xy运动平台的位移插补点序列s
b
(n);滤波计算均采用式13计算。
[0095][0096]
式中,i=1,2,3,4,5,6;m=0,1,2,...,t
i
;y(n)为滤波后的输出结果;x(n)为需要滤波的输入序列,当x(n-m)中n-m为负数,取为x(0)。
[0097]
类似地,基于h4(n)、h5(n)、h6(n)组成的合成运动滤波器链组,对序列s(n)进行轨迹规划,得到当前轨迹基于合成运动规划的位移插补点序列s
h
(n)。
[0098]
在该步骤中,xy运动平台的三次滤波效果可参见图2,进行三次滤波后,速度、加速度、加加速度均为连续,运动平稳。进行滤波处理后序列s
b
(n)有n+t1+t2+t3个位移插补点,序列s
h
(n)有n+t4+t5+t6个位移插补点。
[0099]
步骤2.3,基于t1、t2、t3、t4、t5和t6,采用式14计算得到延时段的点数n
delay
:
[0100][0101]
基于序列s
h
(n),在序列头部和尾部插入延时段序列,得到新的序列s
h
(n),具体过程如下:
[0102]
s
h
(n)第一个位移插补点为s
h
(0),在s
h
(0)前插入n
delay
个s
h
(0)点;最后一个位移插补点为s
h
(n+t4+t5+t6),在s
h
(n+t4+t5+t6)后插入n
delay
个s
h
(n+t4+t5+t6)点,得到新序列s
h
(n)。
[0103]
在该步骤中,通过插入延时段序列,使得新序列s
h
(n)的个数与序列s
b
(n)相同,为n+t1+t2+t3,并且在首尾的延时段序列内,序列s
h
(n)的位移不变,为后续步骤实现过渡后合成运动的高精度轨迹作准备。
[0104]
步骤3,缓存的检查与缓存过程
[0105]
检查xy运动平台输出缓存、合成运动输出缓存是否为空,若两个缓存均为空,跳到步骤6,把相应数据存入缓存;否则如两个缓存存在不为空的情况,则执行下一步骤4。
[0106]
步骤4,对相邻轨迹进行矢量过渡
[0107]
根据缓存组中上一段轨迹信息的两组滤波器时间参数与当前读取的轨迹信息的两组滤波器时间参数,计算这两段轨迹信息的位移插补点叠加的数量;
[0108]
对上一段轨迹信息和当前读取的轨迹信息行矢量过渡,具体为:
[0109]
取出当前轨迹信息的xy运动平台位移插补点序列首部同等数量的位移插补点,计算相应的位移向量,并顺序地与xy运动平台输出缓存中的上一段轨迹信息的位移插补点序
列尾部同等数量的位移插补点进行矢量叠加;同时,取出当前轨迹信息的合成运动的位移插补点序列首部同等数量的位移插补点,计算相应的位移向量,并顺序地与合成运动输出缓存中的上一段轨迹信息的合成运动的位移插补点序列尾部同等数量的位移插补点进行矢量叠加。
[0110]
在本发明的实施例中,该步骤的具体实现过程如下:
[0111]
该步骤需要计算出相邻轨迹信息的位移插补点的叠加数量n
μ
,并基于n
μ
,把相邻轨迹信息的衔接处部分插补点矢量叠加,实现相邻轨迹信息的矢量过渡。流程可分为五个子步骤,步骤4.2到步骤4.4为计算n
μ
的三个约束条件。
[0112]
步骤4.1,现有当前轨迹的v
max
、t1、t2、t3、t4、t5、t6、s
b
(n)和s
h
(n),以及速度缓存中存储的上一轨迹信息的最大速度v
m
、时间参数缓存中的时间参数t
m1
、t
m2
、t
m3
、t
m4
、t
m5
、t
m6
、xy运动平台位移插补点序列m
b
(n)和合成运动位移插补点序列m
h
(n)。设有参考速度v
c
,长轨迹时间参数t
d1
、t
d2
、t
d3
、t
d4
、t
d5
、t
d6
,短轨迹时间参数t
s1
、t
s2
、t
s3
、t
s4
、t
s5
、t
s6
,且设t
d
=t
d1
+t
d2
+t
d3
,t
s
=t
s1
+t
s2
+t
s3
。
[0113]
比较缓存中的t
m1
、t
m2
、t
m3
之和与当前轨迹t1、t2、t3之和的大小,若t
m1
、t
m2
、t
m3
之和较大,令v
c
=v
m
,把t
m1
、t
m2
、t
m3
、t
m4
、t
m5
、t
m6
对应赋值给t
d1
、t
d2
、t
d3
、t
d4
、t
d5
、t
d6
,把t1、t2、t3、t4、t5、t6对应赋值给t
s1
、t
s2
、t
s3
、t
s4
、t
s5
、t
s6
;若当前轨迹的和较大,令v
c
=v
max
,把t1、t2、t3、t4、t5、t6对应赋值给t
d1
、t
d2
、t
d3
、t
d4
、t
d5
、t
d6
,把t
m1
、t
m2
、t
m3
、t
m4
、t
m5
、t
m6
对应赋值给t
s1
、t
s2
、t
s3
、t
s4
、t
s5
、t
s6
。
[0114]
步骤4.2,计算n
μ
的第一个约束条件n1[0115]
相邻轨迹形成的拐角类型可参见图3,分为方向相同、一正一反和方向相反。基于拐角类型,确定n1的取值范围:方向相同,n1取值范围为[0,t
s
];一正一反,n1取值范围为[0,min(t
d2
+t
d3
,t
s
)];方向相反,n1取值范围为[0,min(t
d2
+t
d3
,t
s
)]。
[0116]
在该步骤中,第一个约束条件n1是运动学约束。见图2,t
d2
+t
d3
为长轨迹的加速度上升段(或下降段)的长度,n1不超过t
d2
+t
d3
,不会造成长轨迹匀加速段的叠加,不会造成xy运动平台的加速度超限;n1不超过t
s
是为了不影响短轨迹的后续矢量过渡:因为短轨迹速度达不到极限速度,运动只有加速段和减速段,即为2t
s
。
[0117]
步骤4.3,计算n
μ
的第二个约束条件n2[0118]
基于轨迹时间参数t
d1
、t
d2
、t
d3
、t
d4
、t
d5
、t
d6
与短轨迹时间参数t
s1
、t
s2
、t
s3
、t
s4
、t
s5
、t
s6
,采用下式计算得到n2:
[0119][0120]
在该步骤中,第二个约束条件n2是合成运动的精度约束。n2是上一轨迹的尾部延时段与当前轨迹的首部延时段之和,在n2内,合成运动的插补点序列s
h
(n)的位移是不变,进行矢量过渡后,合成运动的轨迹不会因为矢量过渡而产生偏移误差。
[0121]
步骤4.4,计算n
μ
的第三个约束条件n3[0122]
基于相邻轨迹的类型为圆弧或直线,分为直线间过渡,圆弧间过渡和直线圆弧过渡三种情况。
[0123]
直线间过渡的情况结合图4说明。轨迹ab为上一轨迹,轨迹bc为当前轨迹,θ为相邻轨迹形成的拐角角度。直线db内的插补点为m
b
(n)中末尾n3个插补点,点g为m
b
(n)中倒数第
n3/2个插补点的位置;直线be内的插补点为s
b
(n)中开头n3个插补点,点h为s
b
(n)中第n3/2个插补点的位置。把m
b
(n)末尾n3个插补点与s
b
(n)开头n3个插补点的位移向量进行矢量叠加,会得到曲线dfe,为矢量过渡后xy运动平台的运动轨迹。e为过渡后产生的最大偏移误差。
[0124]
基于v
c
、t
d1
、t
d2
、t
d3
、n3/2,采用式15,计算得到bg和bh中较长一方的长度:v
c
代入式中v,t
d1
、t
d2
、t
d3
代入式中t1、t2、t3,n3/2代入式中n,计算得到的s(n3/2)为bg和bh中较长一方的长度。
[0125][0126]
式中,v为代入的轨迹最大速度;t1,t2,t3为代入的xy运动平台滤波器时间参数组;n表示序列中第n个(或倒数第n个)插补点;计算得到的s(n)作为序列中第n个(或倒数第n个)插补点与起点(或终点)的距离。
[0127]
基于所求的bg与bh中较长一方的长度,采用式16的方程求解约束条件n3:
[0128][0129]
式中,为长轨迹中第n3/2个插补点与起点的距离,代入参数为v
c
、t
d1
、t
d2
、t
d3
、n3/2。
[0130]
在直线间过渡的情况中,式15是用于计算轨迹规划后,序列中第n个插补点与起点的距离(或是倒数第n个的插补点与终点的距离),v
c
、t
d1
、t
d2
、t
d3
均为长轨迹的参数,对应求出长轨迹中第n3/2为插补点与起点的距离,n3与距离成正比。而e与gb、bh形成的平行四边形有关,gb和bh与e成正比,为方便计算,把平行四边形看作菱形,gb、bh取较大的一方计算。通过式16,在误差e小于激光振镜模组的工作范围w的条件下,求解n3的最大值。
[0131]
圆弧间过渡的情况结合图5进行说明。轨迹ab为上一轨迹,轨迹bc为当前轨迹,向量为弧的结束矢量,向量为弧圆心到点b的单位矢量,向量为弧的起始矢量,向量为弧圆心到点b的单位矢量。点g为m
b
(n)中倒数第n3/2个插补点的位置,点h为s
b
(n)中第n3/2个插补点的位置。把m
b
(n)末尾n3个插补点与s
b
(n)开头n3个插补点的位移向量进行矢量叠加,会得到曲线dfe,为矢量过渡后xy运动平台的运动轨迹。e为过渡后产生的最大偏移误差。
[0132]
在n1的最大值和n2的最大值中选择较小的作为临时约束条件n
temp
。基于n
temp
,采用式15,v
m
代入式中v,t
m1
、t
m2
、t
m3
代入式中t1、t2、t3,n
temp
代入式中n,计算得到上一轨迹倒数第
n
temp
个插补点到终点的子弧线弧长类似地,基于n
temp
,采用式15,v
max
代入式中v,t1、t2、t3代入式中t1、t2、t3,n
temp
代入式中n,计算得到当前轨迹第n
temp
个插补点到起点的子弧线弧长
[0133]
基于子弧线和子弧线采用式17,计算弧线的圆心角a
a
和弧线均圆心角a
b
:
[0134][0135]
式中,为子弧线的弧长;为弧线总长;a
p
为弧线圆心角;计算得到的a
s
为子弧线的圆心角。
[0136]
基于弧长和圆心角a
a
,采用式18计算弧线所对应弦的方向向量
[0137][0138]
式中,l1为弧均弧长。
[0139]
基于弧长和圆心角a
b
,采用式19计算弧线所对应弦的方向向量
[0140][0141]
基于向量和采用式20计算与的夹角θ1;基于向量和采用式20计算与的夹角θ2;基于向量和采用式20计算与的夹角θ3。
[0142][0143]
式中,向量和向量为代入的向量;计算得到的angle为向量和向量的夹角。
[0144]
基于向量和采用式21计算与的旋向r1;基于向量和采用式21计算与的旋向r2;基于向量和采用式21计算与的旋向r3。
[0145][0146]
式中,向量和向量为代入的向量;当r为1,表示向量到向量的旋向为逆时针,为-1则为顺时针。
[0147]
基于θ1、θ2、θ3、r1、r2、r3,采用式22计算方向gb与方向bh的最大夹角θ:
[0148]
[0149]
基于最大夹角θ,代入式16的方程求解约束条件n3。
[0150]
在圆弧过渡这情况中,因为用于计算最大偏移误差e的平行四边形的角度会随n3变化而变化。为了方便计算,计算弦gb与弦bh在变化中所形成的最大夹角θ:计算n3在范围[0,n
temp
]内,计算弦gb的角度变化范围θ1、弦bh的角度变化范围θ2,采用式22计算最大夹角θ。得到θ后,代入式16,求解方程得到n3。
[0151]
直线圆弧过渡的情况与圆弧过渡的情况相同,关键是求出相邻轨迹间的最大夹角θ,代入式16求解n3。
[0152]
在该步骤中,通过控制约束条件n3来控制xy运动平台的偏移误差e小于激光振镜模组的工作范围w,使激光振镜模组能够补偿这偏移误差。
[0153]
步骤4.5,确定n
μ
并进行矢量过渡
[0154]
基于n1、n2和n3三个约束条件,得到n
μ
的取值范围,取最大值作为n
μ
,并开始矢量过渡:从序列s
b
(n)中取出第1个插补点s
b
(1),基于当前轨迹的起点p
s
,采用式23计算起点到第1个插补点的位移向量
[0155][0156]
基于位移向量矢量叠加在序列m
b
(n)倒数第n
μ
个插补点上。并依次地执行,直至把位移向量叠加在序列m
b
(n)的最后一个插补点上;类似地,从序列s
h
(n)首部取出n
μ
个插补点,采用式23计算出对应n
μ
个的位移向量,并依次地叠加序列m
h
(n)尾部的n
μ
个插补点上。
[0157]
在该步骤中,插补点从插补点序列取出后,就不存在于序列中。xy运动平台输出缓存中的序列m
b
(n)在矢量过渡后,速度和加速度如图6所示,虚线为上一轨迹,点线为当前轨迹,黑线为矢量过渡后的轨迹,矢量过渡后,在拐角处能保持一定速度,实现拐角的快速过渡,提高加工效率。因为n
μ
受n2约束,矢量过渡后,仅对合成运功输出缓存中的序列m
h
(n)中的延时段插补点进行了叠加,延时段内合成运动的位移是不变的,矢量过渡不会改变合成运动的轨迹。
[0158]
步骤5,位移插补点的输出
[0159]
把xy运动平台输出缓存中的位移插补点序列作为xy运动平台的位移插补点进行输出;把合成运动输出缓存中的位移插补点顺序地与xy运动输出缓存中的位移插补点序列进行矢量相减,把相减后的位移插补点作为uv运动平台的位移插补点进行输出;
[0160]
清空xy运动平台输出缓存与合成运动输出缓存。
[0161]
在上述的实施例中,对于步骤5,此时xy运动平台输出缓存有序列m
b
(n),合成运动输出缓存有序列m
h
(n);基于m
b
(n)和m
h
(n),采用式23计算激光振镜模组的输出序列s
m
(n):
[0162]
s
m
(n)=m
h
(n)-m
b
(n)
ꢀꢀ
式23
[0163]
把序列m
b
(n)输出到xy运动平台,驱动y轴直线伺服电机与x轴直线伺服电机;把序列s
m
(n)输出到激光振镜模组,驱动激光振镜模组内的伺服电机转动。输出后,清空xy运动平台输出缓存和合成运动输出缓存。
[0164]
在该步骤中,利用式23进行矢量相减,逆推激光振镜模组的位移插补点,使xy运动平台与激光振镜模组的同步合成运动能完美重现原轨迹,见图7的合成运动效果图,细直线为输入的原轨迹,点线为xy运动平台的运动轨迹,虚线为xy运动平台与激光振镜模组的合
成运动所走的轨迹,虚线完美覆盖在细直线上,实现了合成运动完美重现原轨迹,而点线的xy运动平台的运动通过曲线快速通过拐角,实现高速运动。
[0165]
步骤6,将xy运动平台的位移插补点序列存入xy运动平台输出缓存,合成运动的位移插补点序列存入合成运动输出缓存,两组滤波器时间参数存入时间参数缓存,轨迹信息的最大速度存入速度缓存。
[0166]
本申请的实施例中,xy运动平台的位移插补点序列s
b
(n)存入xy运动平台输出缓存,记为m
b
(n);合成运动的位移插补点序列s
h
(n)存入合成运动输出缓存,记为m
h
(n);时间参数t1、t2、t3、t4、t5和t6存入参数组缓存,记为t
m1
、t
m2
、t
m3
、t
m4
、t
m5
和t
m6
;轨迹的最大速度v
max
存入速度缓存,记为v
m
。
[0167]
步骤7,检查轨迹信息队列有无下一段轨迹信息,若有下一段轨迹信息,跳回到步骤2;若无下一段轨迹信息,执行步骤5。
[0168]
对图8图形进行测试,插补周期t
c
为0.25ms,xy运动平台的极限速度v
l
为1000mm/s,极限加速度a
l
为1g,极限加加速度j
l
为200m/s3,加速度斜率d
l
为4000m/s4,激光振镜模组加工范围w为
±
15mm,极限加速度a
h
为10g,极限加加速度j
h
为800m/s3,加速度斜率d
l
为32000m/s4。单独使用xy运动平台,不采取拐角过渡,加工时间为11.106s;使用本发明算法,时间为7.235s,缩短了3.871s,优化效率达34.86%,优化效果明显。
[0169]
以上实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围,均应包含在本申请的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips