
 商标分类
商标分类  商标转让
商标转让 
激光板材切割机的制作方法
 2021-01-29 15:01:11|
2021-01-29 15:01:11| 208|
208| 起点商标网
起点商标网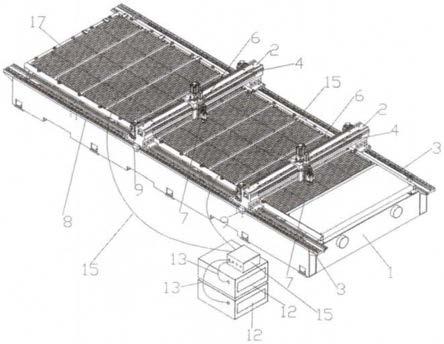
[0001]
本发明涉及激光切割设备领域,尤其涉及激光板材切割机。
背景技术:
[0002]
激光切割机是将从激光器发射出的激光,经光路系统,聚焦成高功率密度的激光束。激光束照射到工件表面,使工件达到熔点或沸点,同时与光束同轴的高压气体将熔化或气化金属吹走。随着光束与工件相对位置的移动,最终使材料形成切缝,从而达到切割的目的。
[0003]
激光切割加工是用不可见的光束代替了传统的机械刀,具有精度高,切割快速,不局限于切割图案限制,自动排版节省材料,切口平滑,加工成本低等特点,将逐渐改进或取代于传统的金属切割工艺设备。激光刀头的机械部分与工件无接触,在工作中不会对工件表面造成划伤;激光切割速度快,切口光滑平整,一般无需后续加工;切割热影响区小,板材变形小,切缝窄(0.1mm~0.3mm);切口没有机械应力,无剪切毛刺;加工精度高,重复性好,不损伤材料表面;数控编程,可加工任意的平面图,可以对幅面很大的整板切割,无需开模具,经济省时。
[0004]
目前光纤激光切割机已经广泛用于金属板材切割加工领域,光纤激光切割机是利用光纤激光。发生器作为光源的激光切制机,激光由光纤传榆,结构简单,性能稳定。当前公知的激光板材切割机都是只有一个激光切割头在工作,随着科技的发展,激光板材切割机的工作台面越快越大,从传统的板材加工能力范围从1.5米* 3米逐渐发展为2米*6米、2.5米* 8米,甚至更长更大。光纤激光切割机的功率也愈来愈大,从千瓦级别发展到万瓦级别,在实际生产过程中,由于现有的光纤激光板材切割机只有一个激光切割头,切割效率较低,在使用大床身加工小板材时存在机床的空间浪费,另外不同功率的激光器成本也不一样,功率越高价格越高,使用高功率激光器切割薄板则需要降功率运行,不能充分有效利用光纤激光器的功率,导致光纤激光切割机综合利用效率低,投资效用低。
[0005]
另外,对于双工位甚至多工位同步联动或异步联动的激光切割机,由于加工区域的不同导致了激光头定位存在一定的困难,特别是在联动模式下,不仅要校准每一个激光头的绝对位置,而且需要对多个激光头的相对位置进行校准。激光切割机不同于常见的数控机床,其需要具备更高的运动精度及定位精度。因此,通过对激光头原点位置的校准对于激光加工至关重要。
技术实现要素:
[0006]
本发明的技术方案是:一种两个及两个以上激光切割头联动的激光板材切割机,在实际切割中可以实现多个激光头的联动,达到多工位的同步/异步加工,或实现单个工位内的协作加工。
[0007]
具体的,设备机构包括:床身、激光器组、多路激光光路输入输出的切换装置、多个激光光纤跳线、两个或两个以上激光头、两个或两个以上三轴运动机构、多个位移传感器、
防碰撞的安全限位组件、电路、气路等等。
[0008]
床身,实施为一个矩形的支撑体,床身上具体为实施加工的工作台或工作平面。
[0009]
床身上方布置两个或两个以上的激光头,同时每个激光头对应一个运动组件以驱动激光头实现坐标移动。即,每个运动组件及相应激光头都可以进行单独的加工动作。因此,可以进一步的实现的是,多个运动组件及相应激光头可以进行组合式加工动作。
[0010]
因此,本发明方案的基础特点是:床身上布置两个或两个以上的激光头,即至少两个激光头的布置,其可以达到单工位内的组合动作加工,或多个工位上的同步/异步联动加工。例如,布置两个激光头时,即可以在工作台上划分为各自激光头对应的加工工位,即双工位。当实施同一种产品的切割加工时,两个激光头根据控制程序进行同步联动加工,此情况下加工效率成倍。当实施不同茶农的切割加工时,两个激光头根据控制程序进行一步联动加工,此情况下体现设备功能性。当加工大面积的产品时,两个激光头可以同时在该产品上进行加工,加工动作根据需要实施为同步或异步,此情况下效率成倍且功能突出。
[0011]
区别于现有技术中常见的多工位激光切割机,其大多数采用独立工位与独立传动的组合,即工位与工位之间无法组合,激光头与激光头之间更无法协作。而一些可以进行多个激光头联动的激光切割机采用的是联排式移动,例如两个激光头装配在同一x轴组件上,x轴组件则架设在y轴组件上。两个激光头随x轴组件整体位移,而两个激光头则在x轴组件上以相对移动产生间距变化。显然这两类设备从功能性到智能控制都存在局限性,区别于这两类激光切割机,本发明方案的“多头、多工位组合”能够达到更灵活更智能的动作组合,即在“左手画方、右手画圆”的基础功能上进行更为创造性的结构设计。更为突出的是,在精密度要求更高、控制要求更精准的激光切割设备上进行本发明方案基础特点的布置显然要克服来自设备自身特点的局限性。因为,本方案中的“多头、多工位组合”结构所带来的直接优势体现在设备的多种加工模式上。因此,设备上相应的传动、定位、供能也需要解决相应的技术问题以达到协作配合及多功能模式的显著效果。
[0012]
l 空间位移结构的搭建对于空间位移,以建立直角坐标体现为主。以床身上的工作台为基础,在床身长度方向上布置第一导向件,定义为y轴组件,两条y轴组件平行布置在工作台两侧形成y轴方向的导向。
[0013]
在y轴组件上架设x轴组件形成正交布置,根据本发明方案的基础特点,在y轴组件上至少设置两个x轴组件以形成基础的“双激光头”结构。同时,每个激光头又可以在各自x轴组件上形成x轴向的位移调节。x轴组件与y轴组件的组合实现了平面内坐标位移的移动问题,进一步的激光头通过一个z轴组件配合在x轴组件上,那么基于z轴组件的移动可以提供激光头进行升降调节。
[0014]
基于上述的空间直角坐标体系的移动结构,各组件的驱动及传动形式并不局限,例如采用滑轨式位移、丝杆式传动、悬浮式位移等等具可以达到直线位移的目的。而动力源及驱动方式可以采用电动也可以采用气动,例如通过伺服电机进行驱动,不仅稳定性好而且,可控性高,能够保障位移精度。
[0015]
具体的:在床身两侧沿y轴方向设置有y轴直线驱动机构,其包括y轴直线轨道、y轴驱动电机,y轴直线轨道上架设两个横梁形成龙门式布置,也可以采用悬臂式布置。横梁可以沿着y轴直线轨道产生往返的平移,且两者的移动范围或产生部分空间重叠。在每一个横
梁上都布置有x轴直线驱动机构,主要包括x轴直线轨道、x轴驱动电机。x轴直线轨道上装配有一个固定座,固定座可以沿着x轴直线轨道产生往返位移。固定座上设置z轴直线驱动机构,其主要包括z轴直线轨道、z轴驱动电机。z轴直线轨道上装配激光头,因此,激光头可以进行升降调节。
[0016]
每一个x轴组件上都设置一个防碰撞的安全限位组件,其包括接触式行程开关或光电传感器。当多个x轴组件在运行过程中,若触发传感时及时制动,避免发生干涉碰撞,起到安全保护作用。
[0017]
根据空间位移结构的搭建,激光切割机可以实现多个激光头同步或异步或单独的移动动作,而其对于本方案其他功能的组合具有至关重要的作用。
[0018]
l 激光头的零点校准激光切割设备属于高精度设备,因此对于激光头的位置校准尤为重要。常见的单头切割机因加工区域的唯一性,对于坐标校准的要求并不高。而本方式是基于多激光头对应多工位的创新方案,因此多个激光头除去单独定位的要求,同时还需要对多个激光头的相对坐标进行校准。
[0019]
本方案中,激光头通过校准组件进行单激光头的原点定位或进行多个激光头间的相对定位。
[0020]
具体的,校准组件包括:机械式原点校准组件,其包括对应于加工区域零点位置的传感器,及设置于激光头处的碰块。
[0021]
数字式原点校准组件,包括沿导向件布置的传感器标尺及设置激光头处的编码器。
[0022]
本方案中可以上述任一方式进行,或者采用两者组合方式进行布置。
[0023]
校准组件从客观结构上包括:零点坐标检测部,该零点坐标检测部则是采用物理方式对激光头的归零位置进行校验。激光头在零点校准过程中则需要解决两个难点:第一、零点位置的准确性。第二、激光头位移的精度控制。
[0024]
若采用机械式原点校准组件,那么零点位置的准确性主要是由零点坐标检测部来实现的,而激光头位移的控制精度则是通过碰块和位置开关的触发来实现控制的。若采用数字式原点校准组件,那么可以通过布置零点坐标检测部来进行校验,也可以基于传感器标尺的反馈进行系统校验,或者两者方案的结合。
[0025]
具体的,零点坐标检测部包括:设置在床身归零位置上的零点参考孔,同时,在激光头上设置零点检测孔。那么,激光头在位置归零时,零点参考孔与零点检测孔是同轴的,即零点参考孔与零点检测孔在激光头处于归零位置时保持同轴向的轴线重合关系。基于该方案的零点校准,用任一激光头某一位置加工一个轨迹后,使用其他的激光头在该同一位置进行切割动作,两者的轨迹必然是重合的。若发生轨迹偏移,及在后的加工并未完全落入第一个加工轨迹上,则说明归零校准失误。
[0026]
激光头在靠近零点过程中的位移精度控制,不同点校准组件采用不同的方式。上述的机械式原点校准组件采用传感器及碰块。即在靠近床身零点位置的x及y方向的某一位置上,具体的位置坐标根据床身尺寸设置,或根据行业惯用标准来布置。在该位置上设置碰块或者传感器,相应的在激光头上布置传感器或者碰块。即采用碰块和传感器进行位置触
发,当到达该位置时,驱动激光头位移的动力源开始减速或者停止,并采用接近速度或怠速使激光头达到零点位置。
[0027]
对于数字式原点校准组件则相对较为简单,例如:增量式光/磁栅标尺,其通过标尺上设定的位置标识进行感测控制。在达到预先标识后进行一个速度控制,位置归零时可以根据标尺上的归零表示进行校验也可以通过上述的校准组件进行校验。
[0028]
绝对值型光/磁栅标尺更为方便,只需通过系统识别标尺上的绝对式光栅码进行控制,在系统设定位置减速,在零点位置校验或通过上述的校准组件进行校验。
[0029]
l 激光头输出的直通/聚能激光头在布置好后需要接入激光光路,正因为本方案是基于多个激光头多工位组合形式的创新手段,因此激光光路的设置也配套有创造性的方案。
[0030]
本设备上包括一个激光发生组件,该组件为组合式的激光输出装置或集成的一体式输出装置。其所达到的技术效果是,通过多个激光器的输出可以实现输出光路的分/聚。光路切换装置输出光路至激光头,为激光头提供光能。
[0031]
具体的,激光发生组件,包括输出独立光路的激光器。原则是,每个激光头都对应一个激光器,该方式下就可以实现每个激光头的“单能”输出。
[0032]
在激光发生组件里设置一个光路切换装置,该光路切换装置的作用是可以将单个的独立光路方向改变。基于该手段下,产生了两种方式:第一、单个独立光路通过接入光路切换装置实现光路转向,转向至另一独立光路,并与该独立光路耦合形成输出的聚能。该情况下,可以将某一激光头的输出功率提高。具体的,若两个以上的激光头时,可以基于该原理下进行光路的排列组合布置。即若定义激光头在单光路功率下输出为一级输出,则可以设置相应的激光头具备二级输出或多级输出的功能。
[0033]
第二、多个并列的独立光路耦合至一个输出,该输出通往一激光头实现聚能输出,在并列的独立光路上设置光路切换装置以改变单条独立光路的方向形成单激光器与单激光头对应的直通输出。具体的,三个激光器形成三条并列的光路,三条光路通过耦合器耦合后输出至激光头a,此时激光头a处于三倍聚能功率下。在并列的光路上布置切换装置,当切换装置工作时,三条独立光路分别被转向,并分别通往激光头a、b、c。该布置方式下,当切换装置不工作,则激光头a三倍聚能工作,若切换装置 工作,则激光头a、b、c均单能输出。
[0034]
光路切换装置包括:一光纤输入口及与之对应的一光纤输出口关联以形成出入对应的直通光路。直通光路上则采用直通连接器,直通连接器即一个聚光的连接器,其接入单个激光器的独立光路并作为直通光路输出至对应的激光头上。而且聚能的光路上则包括光线合束器,光线合束器即一个耦合器,其接入多个独立光路并耦合成合能光路后输出至任一激光头上。
[0035]
为了实现光路的转向,光路切换装置包括切换组件。具体的,切换组件包括:活动布置在直通光路上的反射透镜组;光束从准直透镜组射入并从聚焦透镜组射出,在直通光路的原路径上及反射透镜组的反射路径上均布置聚焦透镜组。
[0036]
反射透镜组采用的活动布置方式包括:定点翻转式、轨迹位移式。
[0037]
定点翻转式反射透镜组包括:反射镜,及使反射镜转动至反射角度的转轴;反射镜绕转轴翻转至光路中产生光路偏转。
[0038]
轨迹位移式反射透镜组包括:按反射角度布置的反射镜,及推拉反射镜的位移件;位移件推出反射镜至光路中产生光路偏转。
[0039]
在整个的激光发生组件中还包括控制器,控制器可以控制光路切换组件产生光路输出的聚能/直通。一般的,控制器包括手动控制模块和系统自动调整模块。手动控制模块可以通过操作者人为的手动控制来调整反射透镜组的工作状态,从而达到光路输出的直通/聚能。而系统自动调整模块则是基于设备整体系统的自动控制,通过程序设定配合驱动结构,驱动结构来控制反射透镜组的工作状态。
[0040]
本发明的优点是:在实际切割中实现多个激光切割头联动,实现同步或异步精确切制,成倍提升切割效率,提高大床身的台面利用率,厚板材的切割,从而提高激光切割能力范围,投资性价比高。
附图说明
[0041]
下面结合附图及实施例对本发明作进一步描述:图1为本方案的激光切割机的结构图;图2为本激光切割机上局部位移组件的结构图;图3为本激光切割机上零点校准结构的示意图;图4为横梁的等轴测视角结构图;图5为横梁另一等轴测视角结构图;图6为本激光切割机双工位异步加工的工位示意图;图7为本激光切割机双工位同步联动加工的工位示意图;图8为本激光切割机上双路激光的分/聚原理图;图9为本激光切割机上双路激光的聚能原理图;图10为三路激光的分/聚原理图;图11为本激光切割机中光路切换的原理图;图12为定点翻转式反射透镜组的结构示意图;图13为轨迹式反射透镜组的结构示意图。
具体实施方式
[0042]
实施例1一种数个激光切割头联动的激光板材切割机,包括;床身、激光器组、多路激光光路输入输出切换装置、多个激光光纤跳线,至少2个激光切割头,至少2个三轴运动机构,数个位移传感器,防碰撞安全限位组件,电路,气路等。
[0043]
床身为一矩形床身,床身两侧沿y轴方向设置有y轴直线驱动机构,在y轴直线驱动机构上设有至少2个横梁,所有的横梁可以沿床身y轴方向往返移动并且不同横梁的移动范围有部分空间互有重叠。
[0044]
每一个横梁都设置有x轴直线驱动机构,x轴直线驱动机构连接切割头固定座,切割头固定座设置有切割头z轴直线驱动机构,切割头z轴直线驱动机构设置有激光切割头,激光切割头通过激光光纤跳线与多路激光光路输入输出切换装置的光路输出端口连接,多路激光光路输入输出切换装置的光路输入端口与激光器组的光路输出端口连接。
[0045]
多路激光光路输入输出切换装置包含至少2个光纤光路直通连接器和至少1个光纤合束器,光纤合束器满足至少2路激光输入合能为1路激光输出。该多路激光光路输入输出切换装置具有合能和直连2种模式,在合能模式下能够使至少2个激光器产生的激光耦合为一路输出,通过激光光纤跳线连接至1个激光切割头,在直连模式下则激光器组的光路输出端口分别通过多路激光光路输入输出切换装置的光纤光路直通连接器与多个激光切割头连接。
[0046]
当需要使用多个激光切割头需要联动加工时,使用直联模式切割,当需要叠加多个激光器的功率时,使用合能模式切割。
[0047]
床身侧面沿床身y轴方向固定有1条y轴绝对值位移传感器标尺,每一个横梁侧面固定有y轴位移传感器读数头,每一个横梁上的y轴位移传感器读数头能够读取y轴绝对值位移传感器标尺值;每一个横梁沿床身x轴方向固定有1条x轴绝对值位移传感器标尺,切割头國定座固定有x轴位移传感器读数头,每一个x轴位移传感器读数头能够读取x轴绝对值位移传感器标尺值,床身设置有激光切割头x/y轴物理坐标零点,每一个激光切割头设有x/y轴物理坐标零点校正检测部件。
[0048]
进一步的,床身上方左右两侧沿y轴设置有y轴直线驱动机构,y轴直线驱动机构设有至少2个横梁,y轴直线驱动机构为齿轮齿条直线传动机构,齿条和直线导轨沿床身y轴方向平行国定在床身两倒,每一个横梁两侧底部各固定有1组滑块,滑块与直线导轨滑动连接,横梁两侧设有y伺服电机,y轴伺服电机与齿轮连接,齿轮与齿条啮合, y轴侗服电机带动齿轮旋转驱动横梁沿床身y轴方向往返移动并且不同横梁的移动范围有部分空间互有重查,每一个横梁沿床身x轴方向设有x轴直线驱动机构。
[0049]
x轴直线驱动机构的直线导轨沿床身x轴方向固定在横梁上,切割头x轴固定座固定有1组滑块,滑块与直线导轨滑动连接,x轴伺服电机驱动切割头x轴固定座沿床身x轴方向往返移动。切割头x轴固定座沿床身z轴方向设有切割头z轴直线驱动机构,切割头z轴直线驱动机构与激光切割头底板连接,激光切割头底板沿床身z轴方向固定激光切割头,伺服电机驱动激光切制头沿床身z轴方向往返移动。
[0050]
y轴直线驱动机构的滑块能够沿床身y轴方向往返移动,y轴直线驱动机构上依次设置有至少2个龙门架,龙门架通过其底部固定的滑块设置在y轴直线驱动机构的滑轨上,床身y轴方向两侧各固定有2条平行的滑轨,每一个龙门架都能够沿床身的y轴往返移动,y轴直线驱动机构的滑块能够沿床身y轴方向往返移动,y轴直线驱动机构上依次设置有至少2个龙门架,龙门架通过其底部固定的滑块设置在y轴直线驱动机构的滑轨上,床身y轴方向两侧各固定有2条平行的滑轨,每一个龙门架都能够沿床身的y轴往返移动,床身侧边设置有至少1条y轴位移传感器标尺;y轴直线驱动机构为齿轮齿条式,床身y轴方向两侧各固定有2条平行的齿条,龙门架每一个在x轴方向的两侧各固定有用伺服电机驱动的齿轮,从而实现伺服电机驱动龙门架沿y轴往返运动。
[0051]
龙门架每一个侧面都固定有y轴位移传感器读数头,y轴位移传感器读数头可以读取其对应的y轴物理位置并传输至激光切割数控控制单元。
[0052]
龙门架每一个其规格一致,安装孔位一致。
[0053]
龙门架每一个在床身的x轴方向均设置有切割头x轴直线驱动机构,切割头x轴直线驱动机构固定在龙门架上,每一个均切割头x轴固定座通过滑块固定在切割头x轴直线驱
动机构上,切割头x轴固定座在伺服电机的驱动下均能够沿床身的x轴方向往返移动;龙门架每-个在床身的x轴方向均设置有x轴位移传感器标尺,切割头x轴固定座每一个均固定有x轴位移传感器读数头,其可以读取对应的x轴实际物理位置值并传输至澈光切制数控控制单元。
[0054]
y轴位移传感器标尺和x轴位移传感器标尺选用绝对值光栅尺或绝对值磁栅尺。
[0055]
切割头x轴直线驱动机构驱动形式为齿轮齿条式或滚珠丝杆。
[0056]
龙门架每一个均设置有至少1个防碰撞安全限位组件,当多个龙门架在运行中发生若发生干涉碰撞时起安全保护作用。防碰撞安全限位组件可使用接触式行程开关或光电传感器;切割头x轴直线驱动机构规格一致,切割头x轴固定座规格一致。
[0057]
切制头x轴固定座每一个均设置有切割头z轴直线驱动机构;切割头z轴直线驱动机构固定在切割头x轴固定座上,方向为垂直床身的x/y/z面;切割头z轴直线驱动机构每一个均通过滑块设置有一个切割头z轴固定块,切割头z轴固定块在伺服电机的驱动下均能够沿床身的z轴方向往返移动。
[0058]
切割头z轴直线驱动机构规格一致,形式为伺服电机+滚珠丝杠。切割头z轴固定块规则尺寸一致,安装孔位置一致。
[0059]
切割头z轴固定块每一个均固定有零点校正测量块,零点校正测量块为与切割头z轴固定块物理固定的圆孔,圆孔中心轴线与床身的x/y轴平面相垂直,并且其直径与零点的圆孔直径一致。切割头每一个均固定在切割头z轴固定块上,切割头输出的激光光线与床身的x/y面垂直,切割头的激光输出的光斑位置在零点的圆孔中心轴线与切割头z轴固定块物理固定的圆孔中心轴线一致的情况下,每一个切割头输出的光斑位置点重合一致。
[0060]
切割头选用带距离传感器功能的,可自动感知切割头的喷嘴与需要加工的板材之间的距尚并自动调整。
[0061]
数个激光切割头联动的光纤激光板材切割机配置有至少2个光纤激光器,光纤激光器使用光纤进行激光光能的传输;激光器输出的激光光能通过第一路传输光纤输入激光光纤光路控制单元,激光光纤光路控制单元内包含至少2个光纤光路直通连接器和至少1个光纤合束器。
[0062]
激光光纤光路控制单元可控制激光光能的传输方向或通过光纤合束器合能后通过第二路传输光纤传输至目标切制头;激光光纤光路控制单元有多个输入接口和输出接口,可以实现单人单出或n个光纤合并1路光纤输出。
[0063]
根据切割头需要的激光功率大小,激光光纤光路控制单元的输入路径和输出路径可人工调整或通过激光切割数控控制单元自动调整。
[0064]
激光光纤光路控制单元配置、第一路输光纤和第二路输光纤有温度冷却机构;整个机器的运行原理如下,在开始激光切割前,切割所有激光切割头的x/y轴的物理坐标零点与激光切割数控控制单元内设置的x/y轴坐标零点一致,每一个龙门架上安装的y轴位移传感器读数头读取y轴位移传感器标尺值,和切割头对应的x轴位移传感器读数头读取x轴位移传感器标尺值反馈至激光切割数控控制单元,形成闭环控制,激光切割加工需要的程序代码由激光切割数控控制单元进行运算处理后转成伺服驱动机构的指令信号,可以分别控制所有激光切割头的x/y/z轴的运动,实现多个激光切割头进行联动加工,其切割运动轨迹
和速度可同步或异步。
[0065]
数个激光器输出的激光光能可分别输送至一一对应的数个切割头,数个切割头在激光切割数控控制单元下不同加工区域进行同时进行加工,单位时间内有多个激光切割头在进行加工,生产效率提升。在闭环控制下,激光切割数控控制单元也可以获得不同切割头的物理空间坐标位置,还可以实现加工不同切割头切割路径的拼接,同时在激光光纤光路控制单无控制下,还可以进行数个激光器功率叠加后进行高功率切割。
[0066]
实施例2一种数个激光切割头联动的光纤激光板材切割机,以2 个激光切割头联动为例,包括;床身1,床身1上方左右两侧设置有二组相同规格的龙门架y轴直线驱动机构2,龙门架y轴直线驱动机构2的齿条和导轨平行固定于床身y轴方向的左右两侧,龙门架底部左右两侧固定有滑块,滑块与导轨连接,龙门架左右两侧固定有伺服电机,伺服电机连接减速机,减速机连接有齿轮,两个伺服电机同步驱动齿轮,齿轮与齿条啮合从而驱动龙门架沿床身的y轴方向往返移动;床身的侧边固定有y轴位移传感器标尺,y轴位移传感器标尺的长度比床身长度稍短,第一龙门架和第二龙门架的侧边固定有y轴位移传感器读数头,y轴位移传感器读数头能够读取y轴位移传感器标尺的实际物理位置值;龙门架上沿x轴方向固定有切割头x轴直线驱动机构,切割头x轴直线驱动机构的齿条和导轨沿床身的x轴方向固定在龙门架上,切割头x轴固定座底部固定有滑块,滑块与导轨连接,在伺服电机的驱动下驱动切割头x轴固定座沿床身的x轴方向往返移动;x轴位移传感器标尺沿床身x轴方向固定在龙门架上,切割头x轴固定上沿床身z轴方向固定有切割头z轴直线驱动机构,切割头z轴直线驱动机构使用伺服电机+滚珠丝杠传动,激光切割头固定在滑块上可以沿z轴上下移动,切割头x轴固定座固定有x轴位移传感器读数头,x轴位移传感器读数头能够读取x轴位移传感器标尺的实际物理位置值,龙门架底部固定有防碰撞安全限位组件。
[0067]
第二个龙门架同第一个龙门架,以相同的驱动方式固定有第二个激光切割头,x轴位移传感器标尺和x轴位移传感器读数头固定位置一致通过以上的结构设置,在一个床身上,分别设置有2个激光切割头,y轴伺服电机驱动龙门架上的激光切割头沿床身y轴方向往返移动,x轴伺服电机驱动龙门架上的激光切割头沿床身x轴方向往返移动,z轴伺服电机驱动龙门架上的激光切割头沿床身z轴方向往返移动,激光切割数控系统控制2个激光切割头在床身的不同区域进行x/y轴的同步或异步运动; y轴位移传感器组件和x轴位移传感器组件与激光切割数控系统结合实现位置闭环伺服系统,确保2组激光切割头的运动位置轨迹精确控制。
[0068]
2个激光切割头的激光光能来源及具体连接见图6,第一个光纤激光器通过传输光纤与激光光纤光路控制单元内的第一光纤输入接口30连接,第一光纤连接器32为第一光纤输入接口30与第一光纤输出接口33的光路连接通道,第一光纤输出接口33与第二路传输光纤15连接,第二路传输光纤15与第一个龙门架上安装的激光切割头连接,这样第一个光纤激光器与第一个激光切割头形成完整的激光光路通道。
[0069]
第二个光纤激光器通过传输光纤与激光光纤光路控制单元内的第二光纤输入接口34连接,第一光纤连接器35为第一光纤输入接口34与第一光纤输出接口36的光路连接通道,第二光纤输出接口36与第二路传输光纤15连接,第二路传输光纤15与第二个龙门架上安装的激光切割头连接,这样第二个光纤激光器与第二个激光切割头形成完整的激光光路
通道。
[0070]
图4和图5为两种切割案例;其中,图4为2个激光切割头分别在切割的产品的2个不同区域同时联动异步切割示意图,一个激光切割头切割区域a,另外一个激光切割头同时切制区域b,2个激光切割头组合联动完成一个产品的切割;图5为2个激光切割头分别在2个不同区域同时完成n个产品的激光切割联动同步切割工艺,区域a和区域b排有多个同一种规格产品,则两个切制头同时联动同步完成多个产品的切割;合能模式切割,在需要切割厚板,但是使用1个光纤激光器不能达到所需要的能量时,则2个光纤激光器输出的激光通过激光光纤光路控制单元内的合能模式合并输出为一路激光至1个激光切割头,只使用1 个激光切割头汇集2个光纤激光器的能量完成较厚板材的切割;图6以2路光纤激光器为例说明合能模式切割第一个光纤激光器通过传输光纤连接至第三光纤输入接口37,第二个光纤激光器通过传输光纤连接至第三光纤输入接口38, 2个光纤激光器输入的光能通过光纤合束器39合能为1路光纤通过输出第三光纤输出接口,第三光纤输出接口通过传输光纤连接至1个激光切割头,从而实现合能模式切割。
[0071]
图7 为激光切割头x/y坐标零点的确认,由于在实际生产中,在使用2个激光切割头联动生产一个产品时,需要机器能够保证这2 个激光切割头的重复定位精度需要一致,这样才能保证联动切割时大,工件时,两个激光切割头切割共同切割一个产品时其实际所切割的尺寸满足切制精度要求;故需要对2个激光切割头的切割原点进对与床身x/y轴坐标系参考原点的物理确认,确保2个激光切割头输出的光斑位置的重复定位时重合一致。
[0072]
实现其技术方案如下;每一个激光切割头z轴固定块侧面固定有切割头原点校正块50,切割头原点校正块50上沿z轴方向设置有切制头原点检测孔51,床身1侧面固定有床身x/y轴坐标系原点参考块52,床身x/y轴坐标系原点参考块52在z轴方向设置有床身x/y轴坐标系原点检测孔53,床身设置激光切割零点55,当切割头原点检测孔51 与床身x/y轴坐标系原点检测孔53的孔轴孔轴线重合一致时,激光切割,7输出的激光光线56与激光切割零点55重合一致;2个激光切割头所分别7对应的y轴位移传感器读数头9读取y轴位移传感器标尺8, y轴位移传感器读数头。
[0073]
本发明实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明的。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明的所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips