
 商标分类
商标分类  商标转让
商标转让 
汽车水箱散热器双枪自动焊接装置的制作方法
 2021-01-29 14:01:17|
2021-01-29 14:01:17| 192|
192| 起点商标网
起点商标网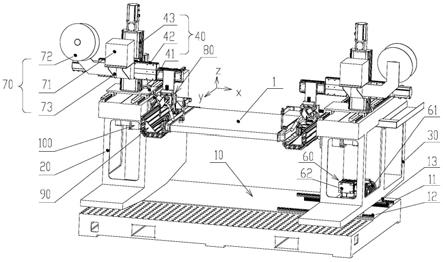
[0001]
本发明涉及自动化焊接技术领域,具体涉及一种汽车水箱散热器双枪自动焊接装置。
背景技术:
[0002]
水箱散热器是汽车的主要配件之一。如图8所示,水箱散热器由中间散热片部和两侧的水室组成,在制造过程中,需要将插装在散热片部两端的两个水室与散热片部焊接在一起,并且保证水室不漏水,焊接工序是整个制造过程中的关键工序。现有焊接散热器的方法主要有以下三种:立式焊接,把工件立起来焊接,采用两把枪对右侧焊缝正反面同时焊接,焊接完成后手动松开夹具,工人把工件换个方向再次装夹上去进行左侧焊缝正反面的焊接。水平式焊接,把散热器水平放置在夹具上,用两把枪对散热器正面的两条焊缝进行焊接,焊接完成后,等待工件冷却后松开夹具,人工搬动工件,把散热器翻转180度后水平放置在夹具上,进行反面两条焊缝的焊接。
[0003]
机器人全自动焊接,把散热器放置在变位机上,机械手带动焊枪对其中一个焊缝进行自动焊接,接着变位机带动工件翻转位置,机械手继续进行第二条焊缝的焊接,以此类推,逐步完成四条焊缝的焊接。
[0004]
立式焊接及水平焊接都是采用双枪焊接,能同时焊接完成两条焊缝,相比于人工焊接能节约一半的操作时间,其缺点是每次只能焊接一侧或者一面,而在对另一侧或者另一面进行焊接的时候,工人需要对工件进行冷却,等待工件冷却后工人再把工件放置到操作台上去进行焊接,这一过程操作复杂,并且浪费大量的时间,导致生产周期长。采用机器人焊接,自动化程度高,其缺点是每次只能焊接一条焊缝,每次焊缝焊接前都需要等待变位机对工件进行变位操作,等待工件移动到既定位置才能开始焊接,因此焊接效率并不高,而且该方法使用的机器人和变位机的造价昂贵,性价比不是很高。
[0005]
另外,由于水箱散热器是铝材质产品,现有散热器焊接均采用tig氩弧焊接技术,焊接过程中由于热量堆积常导致工件产生很大的弯曲变形,焊缝容易跑偏,尤其对于焊接厚度为1.2~1.5mm的工件,非常容易烧穿,焊缝变形量巨大。
技术实现要素:
[0006]
为解决上述技术问题,本发明提供一种汽车水箱散热器双枪自动焊接装置。
[0007]
本发明采用的技术方案是:一种汽车水箱散热器双枪自动焊接装置,包括底座、左机座、右机座、第一机械臂、第二机械臂、横移驱动装置、送丝机构、焊接机构、工件装夹装置及翻转装置,左机座固定安装在底座的左侧,右机座可横向移动地安装在底座的右侧,横移驱动装置用于驱动右机座沿底座横向移动,且在移动到位后锁定右机座;第一机械臂、第二机械臂分别安装在左、右机座上,两机械臂结构相同,均为可沿x、y、z轴运动的三坐标机械臂;送丝机构与焊接机构配套
设置,左侧送丝机构及焊接机构安装在第一机械臂上由第一机械臂驱动沿左侧焊缝移动焊接,右侧送丝机构及焊接机构安装在第二机械臂上由第二机械臂驱动沿右侧焊缝移动焊接;翻转装置设有两个,分别对称安装在左、右机座上,两翻转装置同步运动实现工件装夹装置的整体翻转;工件装夹装置包括第一夹持机构和第二夹持机构,两夹持机构结构相同,对称设置,第一夹持机构通过左侧翻转装置安装在左机座上,第二夹持机构通过右侧翻转装置安装在右机座上,两夹持机构配合用于夹持待焊接的散热器工件。
[0008]
进一步地,焊接机构设有焊缝机械跟踪装置,所述焊缝机械跟踪装置包括弹簧导杆、第一螺旋弹簧、第二螺旋弹簧、导杆连接座、横臂滑板、导轮支架及跟踪导轮;横臂滑板可滑动地安装在机械臂的横向移动臂上,弹簧导杆设置在横臂滑板与横向移动臂之间,弹簧导杆通过支座两端固定在机械臂的横向移动臂上,导杆连接座设有两个,相间隔地固定在横臂滑板的内侧面上,弹簧导杆穿过两连接座的中心通孔两端分别从两连接座中伸出,左侧伸出端套装第一螺旋弹簧,右侧伸出端套装第二螺旋弹簧,第一螺旋弹簧的一端抵靠横臂滑板的左侧内壁,另一端抵靠左侧连接座;第二螺旋弹簧的一端抵靠横臂滑板的右侧内壁,另一端抵靠右侧连接座;导轮支架及焊枪均固定安装在横臂滑板上,导轮支架的一端固定在横臂滑板上,另一端通过转轴可转动连接跟踪导轮;焊枪枪头对准待焊接散热器的焊缝,跟踪导轮的外周面与散热器水室侧面滚动接触;跟踪导轮靠紧散热器水室时,第一螺旋弹簧受压,远离紧散热器水室时,第二螺旋弹簧受压。
[0009]
进一步地,焊枪通过十字微调机构固定安装在横臂滑板上,十字微调机构设有横向调节机构及纵向调节机构,焊枪通过枪夹及锁紧手柄固定在十字微调机构上,通过枪夹调节焊接的偏转角度,通过横向调节机构及纵向调节机构调节焊枪上下左右移动,从而调节焊枪与跟踪导轮之间的距离;锁紧手柄用于角度调节完成后固定焊枪。
[0010]
进一步地,底座上侧面的右端设有横移导轨及齿条,横移导轨上滑动连接有导轨滑块,导轨滑块固定在右机座底面;横移驱动装置包括横移电机及蜗轮减速机,驱动电机及蜗轮减速机固定安装在右机座的中部型腔内,蜗轮减速机的输出轴竖直向下伸出套装固定有传动齿轮,所述传动齿轮与齿条组成齿轮齿条传动副。
[0011]
进一步地,第一夹持机构包括第一夹具骨架、压紧气缸、压紧气缸安装座、定位块座、定位块挡头、挡块及挡块固定座;第二夹持机构包括第二夹具骨架、压紧气缸、压紧气缸安装座、顶紧气缸及顶紧气缸安装座;挡块通过挡块固定座设置在第一、第二夹具骨架的前端,用于散热器前端定位;定位块挡头通过定位块座设置第一夹具骨架上其头部指向散热器左侧面,顶紧气缸与定位块挡头一一对应设置,通过顶紧气缸安装座设置在第二夹具骨架上其气缸活塞头指向散热器右侧面定位块挡头的一侧,顶紧气缸与定位块挡头配合,用于散热器两侧定位;压紧气缸通过压紧气缸安装座设置在第一、第二夹具骨架上,压紧气缸用于定位后散热器的压紧。
[0012]
进一步地,第一夹具骨架及第二夹具骨架上设置有散热铜板,散热铜板用于支撑散热器,吸收焊接热。
[0013]
进一步地,夹具骨架主要由两块铝型材、角衬板及连接角板组成,两块铝型材经角衬板及连接角板连接成l形支架,两l形支架开口相对,角衬板连接在两块铝型材的外侧,连接角板连接在两块铝型材的内侧;定位块座、顶紧气缸安装座及压紧气缸安装座分别通过铝型材专用螺栓固定安装在水平设置的铝型材的通槽内。
[0014]
进一步地,翻转装置包括回转盘、圆锥滚子轴承、轴承套、齿轮箱、回转轴齿轮、驱动齿轮、翻转电机、电机减速机、齿轮箱盖板、旋转轴及固定连接板;固定连接板用于翻转装置的安装固定,回转盘用于连接工件装夹装置;固定连接板、轴承套、齿轮箱依次固定连接,旋转轴通过圆锥滚子轴承可转动设于轴承套内,旋转轴的一端穿过固定连接板固定连接回转盘,旋转轴的另一端伸入到齿轮箱的箱体内固定套装回转轴齿轮;齿轮箱盖板通过螺钉固定在齿轮箱的顶部,用于封闭齿轮箱箱体;电机减速机及翻转电机固定在齿轮箱外侧面,翻转电机与减速机同轴设置,减速机输出轴的轴线与旋转轴的轴线平行,减速机输出轴伸入到齿轮箱箱体内固定套装驱动齿轮,驱动齿轮与回转轴齿轮组成减速齿轮组。
[0015]
进一步地,翻转电机为伺服电机,电机减速机为行星减速机。
[0016]
进一步地,第一机械臂及第二机械臂均包括前后移动臂、升降臂及横向移动臂;前后移动臂前后可滑动地安装在左机座或右机座的顶面,升降臂竖直固定在前后移动臂的上侧面,横向移动臂与升降臂十字交叉设置,横向移动臂可沿升降臂上下升降;横向移动臂伸向工件的一端设置有横移机构,所述横移机构包括导轨、滑块及横臂滑板,导轨设有两个,两条导轨横向平行设于横向移动臂上,导轨上滑动连接滑块,横臂滑板固定在两滑块上用于连接焊枪。
[0017]
本发明的有益效果:1.本装置的夹具机构采用左右对开式,用两个夹持机构配合装夹,且两夹持机构的夹持间距可调,该夹具适应不同尺寸工件的装夹,且为工件的反面焊接提供了前提条件,现有整体平台式的夹具无法让工件所有的反面焊缝都暴露出来,本装置的夹具机构可随工件尺寸调节装夹间距,让所有工件的反面焊缝都暴露出来,焊接效率大为提高。
[0018]
2.本装置采用双边驱动自动翻转装置,让工件随着夹具一起翻转,无须人工手动翻转工件,工件正面焊缝焊接完成后,可以快速地自动翻转过来进行反面焊缝的焊接,焊接效率高。
[0019]
3.本装置的枪头部分加装了焊缝焊缝机械跟踪装置,确保了焊接过程中焊缝不会因为工件受热产生的局部变形而跑偏,特别适合厚度为1.2~1.5mm的薄壁散热器的焊接,焊接质量大为提高,废品率大大降低。
附图说明
[0020]
图1是本发明的汽车水箱散热器双枪自动焊接装置的结构示意图。
[0021]
图2是本发明的工件装夹装置的结构示意图。
[0022]
图3是图2的b-b方向剖视图。
[0023]
图4是本发明的工件翻转装置的立体结构示意图。
[0024]
图5是图4的剖视图。
[0025]
图6是本发明的焊缝跟踪机构的结构示意图。
[0026]
图7是本发明的横向移动臂的横移机构的结构示意图。
[0027]
图8是现有水箱散热器的结构示意图。
具体实施方式
[0028]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图及一种优选的实
施方式对本发明的技术方案进行清楚、完整地描述。
[0029]
参阅图1,本实施例提供一种汽车水箱散热器双枪自动焊接装置,包括底座10、左机座20、右机座30、第一机械臂40、第二机械臂50、横移驱动装置60、送丝机构70、焊接机构80、工件装夹装置90及翻转装置100。
[0030]
左机座20及右机座30分别安装在底座10的上侧面的两侧。左机座20和右机座30均设有底部安装座、中部型腔及顶部平台。右机座30的底部安装座固定连接在底座10上侧面的一端,底座10的上侧面的另一端设有两条平行的横移导轨11,其中一条横移导轨11的前侧平行设置有齿条12。横移导轨6上滑动连接有导轨滑块13,两导轨滑块13分别固定在右机座30的底部安装座的底面两侧。横移驱动装置60包括横移电机61及蜗轮减速机62,驱动电机及蜗轮减速机固定安装在右机座30的中部型腔内,蜗轮减速机62的输出轴竖直向下伸出套装固定有传动齿轮,所述传动齿轮与齿条12组成齿轮齿条传动副。横移电机61通过蜗轮减速机62驱动传动齿轮转动,齿条12与传动齿轮啮合,带动右机座30沿横移导轨11横向移动,远离或靠近左机座20,从而调节左右机座间的距离,以适应不同宽度的工件装夹。
[0031]
参阅图2及图3,工件装夹装置90包括第一夹具骨架及第二夹具骨架,第一夹具骨架及第二夹具骨架上均设有挡块912及挡块固定座913,挡块912通过挡块固定座913设置在两夹具骨架的前端,用于散热器前端定位;第一夹具骨架上设有压紧气缸96、压紧气缸安装座97、定位块座98及定位块挡头99,第二夹具骨架上设有压紧气缸96、压紧气缸安装座97、顶紧气缸910及顶紧气缸安装座911,定位块挡头99通过定位块座98设置在第一夹具骨架上,定位块挡头的头部指向散热器左侧面;顶紧气缸96通过顶紧气缸安装座97设置在第二夹具骨架上且与定位块挡头99一一对应,顶紧气缸的活塞头指向散热器右侧面;顶紧气缸96与定位块挡头99配合用于散热器两侧定位;压紧气缸96通过压紧气缸安装座97分别设置在第一及第二夹具骨架上,用于定位后散热器的压紧。下面对各部件的结构及连接关系做详细说明。
[0032]
夹具骨架有两个,对称设置。两夹具骨架分别通过翻转装置100与左机座20及右机座30连接。两夹具骨架结构相同,均由两块1640铝型材、角衬板93及连接角板94组成。两块铝型材经角衬板93及连接角板94连接成l形支架,第一铝型材91竖直设置,第二铝型材92水平设置,角衬板93连接在两铝型材的外端面,连接角板94连接在两铝型材的内侧面,角衬板93及连接角板94设置有若干个,同时起到加强骨架强度的作用。
[0033]
散热铜板95设有两块,分别通过铝型材专用螺栓固定在两块水平设置的第二铝型材92的上侧面的外侧。散热铜板95用于支撑散热器,吸收焊接热使散热器降温,防止焊接时工件变形,同时因铜板导电性好也可用于连接地线。
[0034]
挡块912设有两个,分别通过挡块固定座913固定设置在两夹具骨架的前端,挡块912用于散热器前端定位。挡块固定座913通过铝型材专用螺栓固定在第二铝型材92的上侧面,挡块固定座913的一端向散热铜板95延伸,挡块912穿过挡块固定座913其头部指向散热器前端面。通过调节挡块固定座913在第二铝型材2上的安装位置,调节散热器在夹紧骨架上的前后位置。
[0035]
定位块挡头99至少设置两个,在本实施例中,定位块挡头99共设置有两个,两个定位块挡头99相间隔地分别通过定位块座98固定在与左机座20连接的夹具骨架上,定位块座98通过铝型材专用螺栓固定在第一铝型材91的上侧面,定位块挡头99与定位块座98螺纹连
接,挡头头部指向散热器外侧面。
[0036]
顶紧气缸910与定位块挡头99一一对应设置,在本实施例中,共设置两个顶紧气缸,两个顶紧气缸910相间隔地分别通过顶紧气缸安装座911固定在与右机座30连接的夹具骨架上。顶紧气缸安装座911通过铝型材专用螺栓固定在第二铝型材92的上侧面,顶紧气缸910水平安装在顶紧气缸安装座911上,气缸活塞头指向散热器外侧面。顶紧气缸910与定位块挡头99配合,用于散热器两侧定位。
[0037]
压紧气缸96设有若干个,分别通过压紧气缸安装座97固定安装在两个夹具骨架上。在本实施例中,每个夹具骨架上均设置有两个压紧气缸,两压紧气缸96分别设置在散热器的前后两端。压紧气缸安装座97通过铝型材专用螺栓固定在第一铝型材91或第二铝型材92的上侧面,压紧气缸96竖直安装在压紧气缸安装座97上,压紧气缸96的下压头位于散热器水室的上方。
[0038]
本申请的工件装夹装置采用水平装夹的方式,气动压紧,左侧夹具骨架固定连接在左机座20的翻转装置上,只能翻转不能移动;右侧夹具骨架固定连接在右机座30的翻转装置上,既能翻转也能随着右机座30左右横向移动。装夹工件时,把拼装好的散热器水平放置在两夹具骨架的散热铜板95上,散热器前端面抵靠挡块12头部,散热器左侧面抵靠定位块挡头9头部,打开右侧的顶紧气缸910向左顶压工件,使散热器在左右和前后方向上不能移动,然后打开压紧气缸96,压紧气缸96的下压头向下运动从上面压紧散热器,工件装夹完毕。
[0039]
参阅图4及图5,翻转装置100主要由回转盘101、圆锥滚子轴承102、轴承套103、齿轮箱104、隔套105、回转轴齿轮106、压盖107、驱动齿轮108、翻转电机114、电机减速机109、齿轮箱盖板110、减速机板111、旋转轴112及固定连接板113构成。
[0040]
翻转装置100设有两套,分别安装在左机座20和右机座30的中部型腔内,回转盘101通过固定连接板113可转动设置在左机座20和右机座30相对两侧面之间,分别用于连接左右两个夹具骨架。
[0041]
固定连接板113、轴承套103、齿轮箱104依次固定连接,齿轮箱104的底部设有圆形凸台,所述圆形凸台插入轴承套103内,圆形凸台的轴向中心部设有穿过旋转轴112的通孔。旋转轴112通过圆锥滚子轴承102可转动设于轴承套103内,旋转轴112的一端穿过固定连接板113的圆形凸台的通孔固定连接回转盘101,旋转轴112的另一端穿过齿轮箱104底部通孔伸入到齿轮箱104的箱体内,旋转轴112伸入齿轮箱104箱体内的一端固定套装回转轴齿轮106。圆锥滚子轴承102、隔套105、回转轴齿轮106依次套装在旋转轴112上,圆锥滚子轴承102内圈一端抵靠旋转轴轴肩,另一端抵靠隔套105,隔套105位于齿轮箱104底部通孔内,隔套105的另一端抵靠回转轴齿轮106;圆锥滚子轴承102外圈一端抵靠轴承套103内壁,另一端抵靠齿轮箱104的圆形凸台。压盖107通过螺钉固定在旋转轴112的端面,压盖107内侧面抵靠回转轴齿轮106,隔套105与压盖107配合限定圆锥滚子轴承102及回转轴齿轮106的轴向串动。齿轮箱齿轮箱盖板110通过螺钉固定在齿轮箱的顶部,用于封闭齿轮箱箱体。电机减速机109通过减速机板111固定在齿轮箱盖板110上,减速机输出轴穿过减速机板111的通孔伸入到齿轮箱104箱体内,减速机输出轴伸入齿轮箱104箱体内的一端固定套装驱动齿轮108,驱动齿轮108与回转轴齿轮106啮合连接,组成减速齿轮组。翻转电机114输出轴与电机减速机109输入轴固定连接。为了提高两翻转装置的同步平稳性翻转,优选翻转电机114为
伺服电机,电机减速机109为行星减速机。
[0042]
两伺服电机同步转动,通过电机减速机109及传动齿轮组减速后驱动旋转轴112绕电机减速机109的轴线转动,两回转盘101同步带动工件装夹装置90夹持工件整体翻转+、-180度。随着使用时间的增加,齿轮磨损越多,传动间隙越大,因此,当传动间隙大造成翻转不平稳的时候,可用螺钉顶紧减速机板111,调节齿轮副之间的间隙,使其达到理想的效果。
[0043]
参阅图1,第一机械臂40与第二机械臂50的结构相同,均为可以沿着x、y、z三个坐标轴移动的三坐标机械臂。下面以第一机械臂40为例介绍其结构和功能,第一机械臂40包括前后移动臂41、升降臂43及横向移动臂42。前后移动臂41前后可滑动地安装在左机座20的顶部平台上,升降臂43竖直固定在前后移动臂41的上侧面,横向移动臂42与升降臂43十字交叉设置,横向移动臂42可沿升降臂43上下升降;横向移动臂42伸向夹具机构的一端设置有横移机构,所述横移机构包括两条导轨424、两个滑块423、弹簧导杆421、左侧螺旋弹簧422、右侧螺旋弹簧427、两个连接座425及横臂滑板426。两条导轨424横向平行设于横向移动臂42上,导轨424滑动连接滑块423,横臂滑板426固定在两滑块423上。两条导轨424之间平行设置弹簧导杆421,弹簧导杆421通过支座固定安装在横向移动臂42上,两连接座425相间隔地固定在横臂滑板426的内侧面上,弹簧导杆421穿过两连接座425的中心通孔,其两端分别从两连接座425伸出,左侧伸出端套装左侧螺旋弹簧422,右侧伸出端套装右侧螺旋弹簧427;左侧螺旋弹簧422的一端抵靠横臂滑板426的左侧内壁,另一端抵靠左侧连接座425;右侧螺旋弹簧427的一端抵靠横臂滑板426的右侧内壁,另一端抵靠右侧连接座425。
[0044]
焊接机构80包括十字微调机构81、焊枪82、枪夹83、固定杆84、连接杆85、跟踪导轮86及锁紧手柄87。十字微调机构81固定安装在横臂滑板426上,焊枪82通过枪夹83安装在十字微调机构81上,十字微调机构81为现有技术,通过手动调节十字微调机构81的横向调节机构及纵向调节机构调节焊枪82上下左右移动,从而调节焊枪82与跟踪导轮86之间的距离。焊枪82安装角度通过转动枪夹83调节,角度调节完成后拧紧锁紧手柄87固定枪夹83及焊枪82。固定杆84和连接杆85组成导轮支架,固定杆84一端固定在横臂滑板426上,另一端水平伸出用于连接连接杆85;连接杆85的上端垂直固定在固定杆84的伸出端,连接杆85的下端通过转轴可转动连接跟踪导轮86,跟踪导轮86的外周面与散热器水室侧面滚动接触。
[0045]
弹簧导杆421、左侧螺旋弹簧422、右侧螺旋弹簧427、两个连接座425、横臂滑板426、固定杆84、连接杆85、跟踪导轮86组成焊枪焊缝机械跟踪装置,在焊接过程中,当跟踪导轮96靠紧散热器水室的侧面时,右侧压缩弹簧427受力压缩,压缩弹簧的反作用力迫使跟踪导轮紧贴水室侧面,当跟踪导轮96远离散热器水室的侧面时,左侧压缩弹簧422受力压缩,压缩弹簧的反作用力迫使跟踪导轮紧贴水室侧面,从而保证焊枪的枪头始终对准焊缝焊接。
[0046]
送丝机构70包括送丝机71、焊丝盘72及送丝机座73,送丝机71通过送丝机座73固定安装在横向移动臂42上,焊丝盘72与送丝机71连接用于向送丝机供给焊丝,送丝机71用于将焊丝供给到焊枪82。送丝机构70为现有技术,其结构及原理这里不再赘述。
[0047]
本装置的工作方式是:首先,启动横移电机61,调节左机座20和右机座30的间距以适应不同宽度的散热器,调整好后利用蜗轮减速机62的自锁功能固定右机座30;装夹工件;把拼装好的散热器水平放置在两夹具骨架的散热铜板95上,散热器前端面
抵靠挡块12头部,散热器左侧面抵靠定位块挡头9头部,打开右侧的顶紧气缸910向左顶压工件,使散热器在左右和前后方向上不能移动,然后打开压紧气缸96,压紧气缸96的下压头向下运动从上面压紧散热器,工件装夹完毕;调节焊枪82及跟踪导轮96的位置,使焊枪82对准焊缝3,跟踪导轮96贴靠散热器水室侧面,之后固定横臂滑板426,使焊接过程中焊枪82与跟踪导轮86始终处于相对静止状态,左侧螺旋弹簧422及右侧螺旋弹簧427均处于预压缩状态;先对工件正面两条焊缝进行焊接,第一机械臂40与第二机械臂50带动两焊接机构80自前向后移动,跟踪导轮96沿着水室侧面直线行走,约束焊枪82的枪头使其对准焊缝3的位置,在焊接过程中,当跟踪导轮96靠紧散热器水室的侧面时,右侧压缩弹簧427受力压缩,压缩弹簧的反作用力迫使跟踪导轮紧贴水室侧面,当跟踪导轮96远离散热器水室的侧面时,左侧压缩弹簧422受力压缩,压缩弹簧的反作用力迫使跟踪导轮紧贴水室侧面,保证焊枪的枪头始终对准焊缝的;正面焊接完毕后,移开机械臂,启动翻转电机114,翻转装置将散热器翻转-180度,使工件底面朝上,然后对其反面两条焊缝进行焊接;焊接完毕,翻转装置再次将散热器整体翻转+180度,使工件装夹装置80回到初始位置,松开压紧气缸96和顶紧气缸910,取出加工完成的工件,然后再放上新工件进行下一轮焊接。
[0048]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也在本发明的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips