
 商标分类
商标分类  商标转让
商标转让 
一种攻丝机用自动上料装置的制作方法
 2021-01-29 13:01:18|
2021-01-29 13:01:18| 243|
243| 起点商标网
起点商标网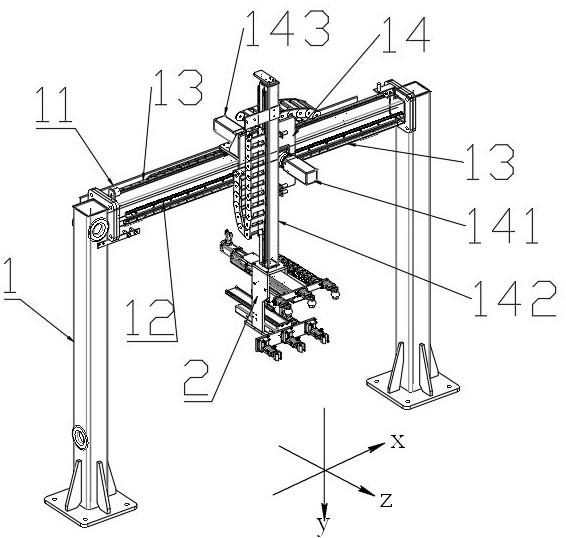
[0001]
本实用新型具体涉及一种攻丝机用自动上料装置,属于攻丝机自动化技术领域。
背景技术:
[0002]
攻丝机是用丝锥在坯料螺母上加工内螺纹的一种机床设备,待加工的坯料螺母简称坯料。传统攻丝机手工操作时,人工将一个待加工的坯料螺母放置到攻丝机的丝锥下方的夹具内,安装丝锥,踩动脚踏开关,使丝锥旋转并下压进行攻丝,攻丝完成后丝锥自动落下或者丝锥压头反向旋转提升使丝锥脱离加工好的螺母,接着手工敲击螺母使螺母松动,将螺母从夹具取出放入成品箱完成加工。该过程人工上料,速度慢,加工效率低,而且存在安全隐患。
[0003]
为了提高生产效率,将现有的单工位攻丝机改进为多工位攻丝机,例如3~6工位攻丝机,多个工位按照一定间距直线排列,每一个工位的攻丝加工可以单独控制,平行工作。为了进一步提升工作效率,降低工人劳动强度,针对多工位攻丝机,还可以为其设置配套的全自动上料机械手来抓取坯料,因此还需要设计配套的自动上料装置。
技术实现要素:
[0004]
针对现有技术存在的问题,本实用新型提供一种攻丝机用自动上料装置,目的在于可以一次性将多个坯料和丝锥抓取、移动、放置,实现自动化上料。
[0005]
本实用新型的技术方案为:一种攻丝机用自动上料装置,包括龙门支架,在龙门支架的横梁上设置有第一连接件,第一连接件可沿横梁做水平方向的x轴运动,在第一连接件上设置有竖梁,竖梁可相对第一连接件做竖直方向的y轴运动,在竖梁的下端设置有第二连接件,在第二连接件上设置有坯料机械手和丝锥机械手,所述坯料机械手和丝锥机械手均可做水平方向的z轴运动。
[0006]
进一步的,在所述龙门支架的横梁上固定连接有x方向的齿条和导轨,在所述竖梁上固定连接有y方向的齿条和导轨,在所述第一连接件上设置有x方向驱动装置和y方向驱动装置。
[0007]
进一步的,所述坯料机械手和丝锥机械手竖直方向上分层重叠设置,坯料机械手位于丝锥机械手的正上方。
[0008]
进一步的,所述坯料机械手包括直线模组,直线模组的滑台上安装有移动板,移动板的末端固定连接有第一安装板,第一安装板上沿水平方向等间距设置有多个坯料手爪。
[0009]
进一步的,所述丝锥机械手包括气缸,气缸输出轴上连接有第二安装板,第二安装板上沿水平方向等间距设置有多个丝锥手爪。
[0010]
进一步的,所述坯料手爪和丝锥手爪均采用气动手指实现抓取。
[0011]
有益效果:本实用新型采用气动手指实现了对多个坯料和丝锥的分别抓取上料:利用x方向驱动装置带动竖梁做x轴方向运动,利用y方向驱动装置带动竖梁及坯料机械手和丝锥机械手做y轴方向运动,使得坯料机械手和丝锥机械手共用一套x、y轴运动机构,简
化了机械组成结构;同时利用直线模组的高精度驱动坯料机械手做z轴方向运动实现精确定位,利用气缸驱动丝锥机械手做z轴方向运动,在满足运动机构的前提下又降低了成本。本装置可显著提升攻丝机的工作效率,降低工人劳动强度。
附图说明
[0012]
图1为本实用新型的立体组成结构示意图。
[0013]
图2为坯料机械手和丝锥机械手的结构示意图。
[0014]
图3为坯料手爪的结构示意图。
[0015]
图4为丝锥手爪的结构示意图。
[0016]
图中标记:1 龙门架,11横梁,12齿条,13导轨,14第一连接件,141第一电机,142竖梁,143第二电机,2第二连接件,21坯料机械手, 211直线模组,212移动板,213第一安装板,214坯料手爪,22丝锥机械手,221气缸,222第二安装板,223丝锥手爪,2141气动手指,2142手爪,2143坯料,2231气动手指,2232右半爪,2233左半爪。
具体实施方式
[0017]
下面结合附图,对本实用新型做详细的说明。
[0018]
如图1所示, 图中箭头所示表示xyz轴的方向,一种攻丝机用自动上料装置,包括龙门架1,在龙门架的横梁11固定连接有x方向的齿条12和x方向的导轨13,在龙门架的横梁11上设置有第一连接件14,第一连接件14上设置有卡块,卡块卡住导轨13,在第一连接件14上x方向驱动装置,x方向驱动装置包括第一电机141,第一电机141经过减速后其输出轴上固定连接有齿轮,齿轮与齿条12啮合,在第一电机141的驱动下第一连接件14可沿着横梁11上的导轨13做水平方向的x轴运动。
[0019]
在第一连接件14上还设置有竖梁142和y方向驱动装置,在竖梁上固定连接有y方向的齿条和y方向的导轨,y方向驱动装置包括第二电机143,第二电机143经过减速后其输出轴上固定连接有齿轮,齿轮与y方向的齿条啮合,在第二电机143的驱动下竖梁142可相对第一连接件14做竖直方向的y轴运动。
[0020]
在竖梁142的下端设置有第二连接件2,在第二连接件上设置有坯料机械手21和丝锥机械手22,所述坯料机械手21和丝锥机械手22竖直方向上分层重叠设置,坯料机械手21位于丝锥机械手22的正上方。所述坯料机械手21包括直线模组211,直线模组的滑台上安装有移动板212,移动板212的末端固定连接有第一安装板213,第一安装板213上沿水平方向等间距设置有三个坯料手爪214,坯料手爪214在直线模组的驱动下可做水平方向的z轴运动,因为对坯料抓取时所需的精度较高,因此采用直线模组的方式来驱动;所述丝锥机械手22包括气缸221,气缸输出轴上连接有第二安装板222,第二安装板222上沿水平方向等间距设置有三个丝锥手爪223,丝锥手爪223在气缸221的驱动下可做水平方向的z轴运动,对丝锥抓取时所需的精度相对较低,因此采用气缸的方式来驱动从而降低成本。上述坯料手爪214和丝锥手爪223均采用气动手指2141、2231驱动各自的手爪来实现抓取功能。
[0021]
通过以上设置,坯料机械手21和丝锥机械手22可以实现三维空间上的x、y、z轴三个方向的运动,每一次可以同时抓取三个坯料或三个丝锥,其工作过程为:将待抓取的三个坯料按照等间距排列好,在三维空间移动坯料机械手使其三个坯料手爪位于三个坯料的正
上方,接着第二电机驱动竖梁带动坯料机械手沿y轴向下移动使坯料手爪的手爪2142伸入坯料2143的孔内,然后坯料手爪的气动手指动作使手爪向外扩张即可将坯料抓取起来,抓取后,在三维空间移动将三个坯料放入攻丝机的坯料夹具内,坯料手爪的气动手指动作使手爪向内收缩即可卸下坯料,然后竖直向上提升坯料机械手,直线模组动作向后收回坯料手爪,等待下一次抓取;丝锥的抓取运动过程类似,不同之处在于丝锥手爪的气动手指2231先驱动其左半爪2233和右半爪2232分开,使丝锥进入左半爪和右半爪之间的内部空间,然后左半爪和右半爪爪向内收缩将丝锥夹紧实现抓取。因此,本装置实现了攻丝机的自动化坯料、丝锥的夹取和移动,可显著提升工作效率,降低工人劳动强度。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips