
 商标分类
商标分类  商标转让
商标转让 
一种无人平台语音控制方法与流程
 2021-01-28 12:01:39|
2021-01-28 12:01:39| 310|
310| 起点商标网
起点商标网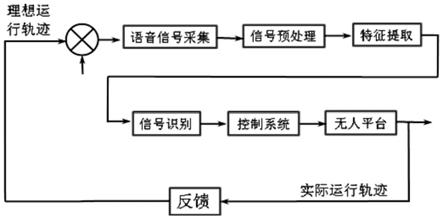
[0001]
本发明涉及一种无人平台控制系统,具体涉及一种无人平台语音控制方法,属于无人平台控制系统技术领域。
背景技术:
[0002]
在民用领域,无人驾驶车辆作为智能交通系统的重要组成部分,将为人们的出行安全提供便利;在国防安全领域,无人平台能代替人在高危环境下完成各种任务,在保存有生力量、提高作战效能方面具有重要意义,是无人作战系统的重要基础;在无人平台的使用过程中,由于工作环境的复杂性和变化性,目前仍无法完全自主地完成任务,需要操作者通过遥控技术完成无人平台的运动规划。随着科技水平的不断发展,传统的接触式遥控方式在无人平台遥控中逐渐不能满足需求,由此产生了一些非接触式遥控方式越来越多被人们所使用,如手势、语音、眼动及脑电等遥控方式;语言作为人与人之间进行信息沟通的最主要方式,可为人机交互使用时提供其它方式不可替代的直接和便利;语音识别技术是人机交互技术的一种,它让计算机识别并理解人类语音所代表的含义;目前,无人平台的遥控主要以传统接触式遥控为主,其控制方式比较单一。
技术实现要素:
[0003]
为解决上述问题,本发明提出了一种无人平台语音控制方法,对于无人平台,能够通过语音命令对其行驶状态进行控制,实现语音识别遥控。
[0004]
本发明的无人平台语音控制方法,通过麦克风进行语音信号采集,经过语音信号数字化和预加重预处理,再经过特定算法提取语音信号的特征参数,训练形成语音模板库,最后选择计算量相对较小并且模板训练算法简单的dtw进行信号识别匹配,从而控制无人平台实现预定的运动轨迹,既可以实现小车的前进、后退、左转、右转等功能,也可以在行走过程中声控改变小车运动状态,并在超出语音控制范围时能够自动停车;同时随着无人平台的实际运行,将实际运行轨迹反馈给语音操控端,通过语音操控使得无人平台能够按理想的轨迹运行;所述方法具体如下:
[0005]
第一步,构建语音识别控制系统,所述语音识别控制系统包括spce061a控制板,及与spce061a控制板通信的语音控制电路板;所述spce061a控制板包括语音输入模块、按键输入模块和声音输出模块;所述语音控制电路板包括用于驱动电机的方向控制桥路和驱动控制桥路;所述方向控制桥路和驱动控制桥路分别通信连接方向电机和驱动电机;所述方向控制桥路和驱动控制桥路均为全桥驱动,其利用四个io端口分为两组分别实现两个方向控制电机和驱动电机的正传、反转和停三态运行;
[0006]
第二步,语音信号采集,通过语音输入模块获得时间和幅度上均为离散的数字语音信号;
[0007]
第三步,信号预处理,spce061a控制板将采集的数字语音信号进行预处理,首先进行端点检测,其用来检测输入声音信号中的有效语音成分,屏蔽静音部分和获取语音开始
与结束点;接着将完成端点检测后的数据通过预加重处理,其提升语音成分中的高频分量,还原原始语音信号;
[0008]
第四步,特征提取,通过梅尔倒谱系数(mfcc)参数进行语音指令识别;并将预处理信号与mfcc参数提取工作放在采样间隔中进行;
[0009]
第五步,信号识别,通过对上一步获得特征参数进行匹配,计算语音指令与语音模型库中的每一个模型的相似度,从而得到最佳的匹配结果。
[0010]
进一步地,所述信号识别采用动态时间规整算法(dtw),根据特征参数提取得到的特征向量,将此特征向量组与模型库中已存在的语音特征向量组进行模型匹配,寻找相似度最高的一组。
[0011]
进一步地,所述语音信号采集具体如下:由麦克风采集语音信号,将声波信号转换为电压信号,并通过信号放大电路将信号放大至合理区域后送入adc进行采样;从而得到spce061a控制板能够处理的数字信号。
[0012]
进一步地,所述预加重处理通过具有6dboct地提升高频特性地预加重数字滤波器完成。
[0013]
本发明与现有技术相比较,本发明的无人平台语音控制方法,通过构建基于语音识别技术的无人平台遥控系统,实现无人平台的语音识别与遥控功能,对于无人平台,能够通过语音命令对其行驶状态进行控制,实现语音识别遥控。
附图说明
[0014]
图1是本发明的语音控制方法流程示意图。
[0015]
图2是本发明的语音识别控制系统结构示意图。
[0016]
图3是本发明的语音识别流程示意图。
[0017]
图4是本发明的信号预处理的预加重结果示意图。
具体实施方式
[0018]
实施例1:
[0019]
如图1至图3所示的无人平台语音控制方法,通过麦克风进行语音信号采集,经过语音信号数字化和预加重预处理,再经过特定算法提取语音信号的特征参数,训练形成语音模板库,最后选择计算量相对较小并且模板训练算法简单的dtw进行信号识别匹配,从而控制无人平台实现预定的运动轨迹,既可以实现小车的前进、后退、左转、右转等功能,也可以在行走过程中声控改变小车运动状态,并在超出语音控制范围时能够自动停车;同时随着无人平台的实际运行,将实际运行轨迹反馈给语音操控端,通过语音操控使得无人平台能够按理想的轨迹运行;所述方法具体如下:
[0020]
第一步,构建语音识别控制系统,所述语音识别控制系统包括spce061a控制板,及与spce061a控制板通信的语音控制电路板;所述spce061a控制板包括语音输入模块、按键输入模块和声音输出模块;所述语音控制电路板包括用于驱动电机的方向控制桥路和驱动控制桥路;所述方向控制桥路和驱动控制桥路分别通信连接方向电机和驱动电机;所述方向控制桥路和驱动控制桥路均为全桥驱动,其利用四个io端口分为两组分别实现两个方向控制电机和驱动电机的正传、反转和停三态运行;
[0021]
第二步,语音信号采集,通过语音输入模块获得时间和幅度上均为离散的数字语音信号;采样之后要对信号进行量化,信号与量化噪声的功率之比为量化信噪比;若用表示输入语音信号序列的方差,2x
max
表示信号的峰值,b表示量化分辨率(量化位长),表示噪声序列的方差,则量化信噪比为:
[0022][0023]
假设语音信号的幅度服从laplacian分布,此时信号幅度超过4δ
x
的概率很小,只有0.35%,因而可以取x
max
=4δ
x
;此时上式变为snr=6.02b-7.2,上式表明,量化器中每位字长对snr贡献为6db;当b=7位时,snr=35db;此时量化后的语音质量能满足一般通信系统的要求;研究表明:要使语音波形的动态变化信噪比达到55db的信噪比,b应取10位以上;为了在语音信号变化范围内保持35db的信噪比,常用12位来量化,其中附加的5位用于补偿30db左右的输入动态范围变化;
[0024]
第三步,信号预处理,spce061a控制板将采集的数字语音信号进行预处理,首先进行端点检测,其用来检测输入声音信号中的有效语音成分,屏蔽静音部分和获取语音开始与结束点;接着将完成端点检测后的数据通过预加重处理,其提升语音成分中的高频分量,还原原始语音信号;由于语音信号的平均功率谱受声门激励和鼻辐射的影响,在800hz以上的高频时约按6dboct衰减,为此要在预处理中进行预加重;预加重的目的是提升高频部分,使信号的频谱变得平坦,以便于进行声道参数分析或频谱分析;预加重在防混叠滤波与ad转换之前进行;这样,不仅能够进行预加重,而且可以压缩信号的动态范围,有效地提高信噪比;所以为尽量提高snr应在ad转换之前进行预加重;同时,预加重也可在ad转换之后进行,用具有6dboct地提升高频特性地预加重数字滤波器实现;它一般是一阶的,即:式中u值接近于1,本发明中取为0.94;加重的信号在分析处理后,需要进行去加重处理,即加上6dboct的下降的频率特性来还原成原来的特性;图4所示为对语音信号“0”的预加重处理结果;从下图可以明显的看出,加重后语音信号中高频分量增强。
[0025]
第四步,特征提取,通过梅尔倒谱系数(mfcc)参数进行语音指令识别;并将预处理信号与mfcc参数提取工作放在采样间隔中进行;
[0026]
第五步,信号识别,通过对上一步获得特征参数进行匹配,计算语音指令与语音模型库中的每一个模型的相似度,从而得到最佳的匹配结果;语音识别一般分为两个步骤,第一步是系统“学习”或“训练”阶段,这一阶段的任务是建立识别基本单元的声学模型以及进行文法分析的语言模型,即构建参考模式库,第二是“识别”或“测试”阶段,根据识别系统的类型选择能够满足要求的一种识别方法,采用语音分析方法分析出这种识别方法所需求的语音特征参数,按照一定的准则和测度与参考模式的模型进行比较,通过判决得出结果。
[0027]
其中,所述信号识别采用动态时间规整算法(dtw),根据特征参数提取得到的特征向量,将此特征向量组与模型库中已存在的语音特征向量组进行模型匹配,寻找相似度最高的一组。所述语音信号采集具体如下:由麦克风采集语音信号,将声波信号转换为电压信号,并通过信号放大电路将信号放大至合理区域后送入adc进行采样;从而得到spce061a控制板能够处理的数字信号。所述预加重处理通过具有6dboct地提升高频特性地预加重数字滤波器完成。
[0028]
上述实施例,仅是本发明的较佳实施方式,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本发明专利申请范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips