
 商标分类
商标分类  商标转让
商标转让 
一种具有反馈转向真实路感的汽车驾驶模拟训练系统的制作方法
 2021-01-25 11:01:31|
2021-01-25 11:01:31| 276|
276| 起点商标网
起点商标网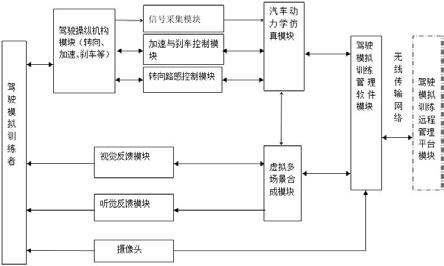
[0001]
本发明涉及一种模拟训练系统,尤其涉及车辆驾驶训练设备,车辆驾驶训练设备的操作方法和装置。
背景技术:
[0002]
在现代社会,驾驶是一项重要的社会技能。目前,在对学员进行驾驶技能培训时,通常是由具有经验的教练一对一在实际道路上驾驶实际车辆进行陪练,这种方法能确保每位学员真正掌握驾驶技巧。
[0003]
然而,这种陪练方式的效率较低,而且,由于需要在实际道路驾驶实际车辆,增加了学车的危险性。因此,存在提高驾驶技能训练的效率和安全性的需求。
[0004]
当前,普通模拟器普遍存在转向“虚”与“飘”的问题,如转向负载仅用弹簧实现,手感不真实,生硬。
技术实现要素:
[0005]
本发明的目的在于提出一种汽车驾驶模拟训练系统设备及实现方案,来解决以上背景技术部分提到的技术问题。
[0006]
本申请提出一种具有反馈转向真实路感的汽车驾驶模拟训练系统,所述系统包括:加速与刹车控制模块,转向路感控制模块,汽车动力学仿真系统模块,虚拟场景合成模块,视觉反馈模块(显示器与仪表盘),听觉反馈模块(音响系统),驾驶模拟训练管理软件模块以及驾驶模拟训练远程管理平台模块,以及摄像头。其中,所述模拟驾驶操纵机构模块,包括方向盘与转向管柱,加速、刹车踏板,转向灯、喇叭开关、雨刮开关组件等,是给模拟驾驶训练者提供驾驶动作输入的操纵装置。
[0007]
所述加速与刹车控制模块,通过加速与刹车踏板机构反馈相应刹车及加速力感给模拟驾驶者。使用加速与刹车踏板传感器检测加速与刹车力度信号,传送至汽车动力学仿真模块,进行相应的虚拟系统场景模拟反馈。
[0008]
所述转向路感控制模块,实现接近实车转向手感的控制装置。
[0009]
所述汽车动力学仿真系统模块,用于仿真分析,实现汽车驾驶模拟训练装置的结构参数与动力学特性的优化匹配,使汽车模拟驾驶训练性能达到优化。
[0010]
所述虚拟多场景合成模块,是驾驶模拟训练系统中重要部分,通过建模软件建立场景模型,进行模型解析和视景渲染后,生成车辆行驶过程中驾驶员所看到的虚拟环境。
[0011]
所述驾驶模拟训练软件管理模块,其功能包括:管理驾驶模拟训练者的身份登录,训练科目选择,训练情况评价,训练持续时间,训练结果的存储,无线远程传输等。
[0012]
所述驾驶模拟训练远程管理平台模块,用于以无线网络通信方式接收各模拟训练终端发送的训练数据,进行集中存储,管理查询,训练综合评价等,以节约驾驶培训成本。
[0013]
所述视觉反馈模块,将虚拟场景通过左,右后视镜显示屏,前方/车内后视显示屏
显示出来,增加驾驶模拟训练实景感觉。
[0014]
所述听觉反馈模块,将虚拟场景增加音频效果,增加驾驶模拟训练实景感觉。
[0015]
所述摄像头,用于实时摄录、存储及再现回放训练者的操作过程。
[0016]
本发明提出一种实现转向反馈真实路感的方法,是通过转向控制器驱动伺服电机,按照方向盘转角及道路状况,提供可调助力和负载阻力,解决普通模拟器普遍存在的转向“虚”、“飘”及生硬的转向感觉。
[0017]
本发明提出一种通过汽车eps典型助力系统结构,通过控制伺服电机的助力及反向助力方式,模拟产生近似真实的转向负载,达到近似真实转向手感的使用效果。
[0018]
本发明提出的汽车驾驶模拟训练系统,能够模拟产生驾乘车辆的车速及加、减速度信号,由汽车动力学仿真系统模块根据驾驶者油门及刹车踏板的使用状况获取。
[0019]
本发明提出的汽车驾驶模拟训练系统,其转向路感控制模块能根据方向盘扭矩传感器和角度传感器提供的方向盘扭矩和角度信号,以及前述的汽车车速信号,控制器伺服电机及减速增扭(蜗轮蜗杆)机构产生方向盘的自动回正效果体验。
[0020]
本发明提出的汽车驾驶模拟训练系统,其转向路感控制模块能根据方向盘扭矩传感器和角度传感器提供的方向盘扭矩及角度信号,以及前述的汽车车速信号,控制伺服电机及减速增扭(蜗轮蜗杆)机构产生方向盘系统的惯性及阻尼补偿的效果体验,使转向手感更平顺。
[0021]
本发明提出的汽车驾驶模拟训练系统,其力矩执行机构包含了转向轴系、扭矩及角度传感器、助力电机、蜗轮蜗杆减速增扭机构组件。
[0022]
本发明提出的汽车驾驶模拟训练系统具有无线网络传输模块,能将驾驶模拟训练者的身份信息,训练科目、训练情况评价,训练持续时间,训练结果等相关数据,实时远程传送至汽车驾驶训练管理平台进行集中统一管理,节约驾驶培训成本。
[0023]
本发明提出的汽车驾驶模拟训练系统,其系统不仅有模拟驾驶训练的实时录屏功能,还配置有监控训练过程的摄像头,能实时记录及回放再现训练者的操作过程;同时可以根据驾驶训练管理平台的需要,进行上传存储及实时监控训练者的实操状态,考核训练的真实性。
[0024]
本发明提出的汽车驾驶模拟训练系统,其系统能以刷脸的方式进行训练者身份确认及登录许可;本发明提出的汽车驾驶模拟训练系统,其系统配置有三块显示屏:即左,右后视镜显示屏,前方/车内后视显示屏,其中车内后视以画中画方式显示在前方显示屏内的一角,增加训练者的实际驾驶体验真实感。
[0025]
本发明的有益效果为:本发明提供一种实现转向反馈真实路感的模拟系统,即通过伺服电机提供可调助力和负载阻力,区别于普通模拟器普遍存在的转向“虚”与“飘”的问题;本发明提供的技术方案能提供选择不同驾驶场景,不同训练科目,使用加速、驻车,倒车等档位开关,转向灯开关,雨刷开关及喇叭等实操功能;本发明提供的技术方案能进行刷脸登录、身份确认,训练场景,操作状态记录存储等各项管理功能。本发明提供的技术方案能通过远程无线通信方式实现训练数据的分布式集中管理。
附图说明
[0026]
图1为本发明汽车驾驶模拟系统的组成框图。
[0027]
图2为本发明汽车驾驶模拟系统之子系统转向路感控制模块组成框图。
具体实施方式
[0028]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例, 对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0029]
本发明具体实施方式提供了一种具有反馈模拟转向真实路感的汽车驾驶模拟训练系统,如图1-2所示。其中,所述系统包括:加速与刹车控制模块,转向路感控制模块,汽车动力学仿真系统模块,虚拟场景合成模块,视觉反馈模块,听觉反馈模块,驾驶模拟训练管理软件模块以及驾驶模拟训练远程管理平台模块,以及摄像头,其中,所述驾驶操纵机构模块包括方向盘,转向指示灯,加速踏板、刹车踏板、档位开关,雨刮,远近灯光等,使用实际汽车的相关组件,作为汽车驾驶训练者进行模拟训练的实际操纵机构。
[0030]
所述加速与刹车控制模块,通过加装实际汽车加速踏板、刹车踏板及其传感器检出装置,检测出驾驶训练者施加于加速踏板和刹车踏板的力度信号,将信号传递给汽车动力学仿真模块,进行仿真处理及虚拟系统场景合成。
[0031]
所述信号采集模块,为采集档位开关、转向灯开关,雨刷及远近光等开关信号的电子装置,采集的信号传递给汽车动力学仿真模块,进行仿真处理及虚拟系统场景合成处理。
[0032]
转向路感控制模块对转向路感的控制,主要依托以下转向执行机构的建立,包含方向盘,下连转向轴系、蜗轮蜗杆减速增扭机构、转向助力电机、转向控制器、转向扭矩传感器以及方向盘转角传感器,扭矩传感器以及方向盘转角传感器安装于转向盘下方的轴系上,助力电机通过花键与蜗杆相连。
[0033]
所述转向路感控制模块的核心部件是转向控制器,它通过方向盘扭矩传感器和角度传感器提供的方向盘扭矩和角度信号,以及前述的汽车车速信号,档位信号,路面信息,利用转向系统控制模型、整车动力学模型控制算法,控制伺服电机及蜗轮蜗杆减速增扭机构实现方向盘的自动回正、转向系统的随速助力力矩及反向阻力矩、转向系统的惯性及阻尼补偿等各项控制功能,从而获得近于实车驾驶的手感体验。
[0034]
本发明提出一种通过汽车eps典型助力系统结构,通过正、反向助力方式,根据方向盘转向角度、车速、科目、路况不同,调节产生方向盘转向系统负载产生近似真实的转向负载大小,即按照转向手力0-8nm调节转向阻力,达到近似真实转向手感的使用效果。
[0035]
转向控制器通过控制助力电机的电流实现对转向负载力矩的控制,电流控制方式采用pi闭环控制。
[0036]
转向控制器对转向手力的控制:转向手力随车速增大而减小。同等条件下,驻车及倒车入库转向手力小于行驶时的手力;同一车速下,转向手力随转向角度增大而减小;转向控制器使用状态机对转向过程中的回正状态进行识别,即识别到,具有一定转向角度,向一定方向转向(大于转向死区扭矩),具有保舵后撒手动作后,进入回正角度闭环控制,使方向盘自然回到转向中心。
[0037]
超过一定车速(如80kph)后,为避免训练者快速转动方向盘手力过轻,在算法控制中,随方向盘转速,加入一定比例的反向助力(转向负载力矩),使得训练系统快速转向更为沉稳。
[0038]
转向算法控制中,正比于转向方向盘角加速度,施加一定比例的助力扭矩,适应训练者的快速转向操作,使转向不出现滞后响应。
[0039]
汽车动力学仿真模块,使用汽车动力学分析软件carsim,进行建模仿真分析,实现汽车结构参数与动力学特性的优化匹配,并将动力学仿真结果,以参数形式分别传递给转向路感控制模块及虚拟场景合成模块,使汽车模拟驾驶训练性能达到接近实车操作的训练感觉。
[0040]
虚拟场景合成模块,是驾驶模拟器中重要的一部分,通过游戏开发平台软件建模软件建立的场景模型,进行模型解析和视景渲染后,生成车辆行驶过程中驾驶员所看到的虚拟环境。
[0041]
驾驶模拟训练场景的呈现,系统配置有三块显示屏:即左,右后视镜显示屏,前方/车内后视显示屏,其中车内后视以画中画方式显示在前方显示屏内的一角,增加训练者的实际驾驶体验真实感。虚拟场景合成模块形成的训练场景数据,放至视觉及听觉反馈模块进行处理后,最后送至各显示屏进行显示及音效输出。
[0042]
驾驶模拟训练管理软件模块支持本地管理及远程传输功能。
[0043]
本地管理功能包括:模拟驾驶训练实时录屏功能,配置监控训练过程的摄像头,实时摄录及回放再现训练者的操作过程;根据驾驶训练管理平台的需要,进行上传存储及实时监控训练者的实操状态,考核训练的真实性;系统能以刷脸的方式进行训练者身份确认及登录许可;远程传输功能:通过配置无线传输模块,将驾驶模拟训练者的身份信息,训练科目、训练情况评价,训练持续时间,训练结果等相关数据,通过网络实时传送至汽车驾驶训练管理平台进行集中统一管理,节约驾驶培训成本。
[0044]
驾驶模拟训练远程管理平台模块,以无线网络通信方式实时接收各模拟训练终端发送的训练数据,集中存储,管理查询训练情况及综合评价结果,从而节约模拟驾驶培训成本,方便集中统一管理。所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips