
 商标分类
商标分类  商标转让
商标转让 
油烟机及其控制方法与流程
 2021-03-11 14:03:24|
2021-03-11 14:03:24| 342|
342| 起点商标网
起点商标网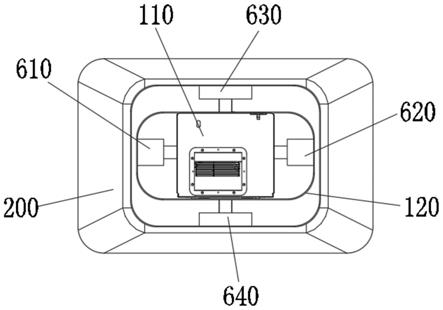
[0001]
本发明涉及吸油烟机技术领域,尤其是涉及一种油烟机及其控制方法。
背景技术:
[0002]
目前烟机的风机是不可移动的,而现有的灶具通常具有两个或两个以上的灶眼,当单灶眼使用时,通常会出现一侧或者一个方向上油烟浓度高,另一侧油烟浓度低而在灶具上方形成油烟浓度不平衡的情况,而风机的位置是固定不变的,油烟需要转动一定的角度才能通过风道排出,在这个过程中,必然会有一部分油烟在进入风道前跑掉,吸烟效果不佳。
技术实现要素:
[0003]
本发明的目的在于提供一种油烟机及其控制方法,以缓解了现有技术中风机的位置是固定不变的,当单灶眼使用时,油烟需要会经过一定的角度才能通过风道排出,部分油烟在进入风道前跑掉,吸烟效果不佳的技术问题。
[0004]
本发明提供的油烟机,包括风机组件、驱动机构和油烟检测装置;
[0005]
所述油烟检测装置设置在油烟机底部的进风口处,用于检测所述油烟机底部进风口处的不同位置的多个油烟浓度值;
[0006]
所述风机组件和所述驱动机构均设置在油烟机的外壳内部,所述油烟检测装置与所述驱动机构通讯连接,所述驱动机构与所述风机组件连接,所述驱动机构用于驱动所述风机组件在所述外壳内移动,以使所述风机组件能够移动至油烟处理的预设最佳位置,所述预设最佳位置根据所述油烟检测装置检测的不同位置的多个油烟浓度值确定。
[0007]
进一步的,所述驱动机构驱动所述风机组件在所述外壳内部的水平面内移动。
[0008]
进一步的,所述外壳包括箱体和保护罩,所述箱体的下端与所述保护罩的上端连接;所述风机组件的上端通过第一弹性件与所述箱体的上端连接,所述风机组件的下端通过第二弹性件与所述保护罩的下端连接,所述第二弹性件和所述保护罩形成油烟机的集烟罩。
[0009]
进一步的,所述油烟机还包括滤网,所述滤网设置在所述集烟罩的底部;
[0010]
所述油烟检测装置包括多个油烟浓度传感器,多个所述油烟浓度传感器间隔设置在所述滤网或者所述集烟罩的底面上;
[0011]
所述驱动机构用于驱动所述风机组件在与所述滤网或者所述集烟罩的底面平行的平面内移动。
[0012]
进一步的,所述滤网为矩形结构,多个所述油烟浓度传感器均布在所述滤网上。
[0013]
进一步的,所述油烟浓度传感器的数量为四个,且分别设置在所述滤网的四角。
[0014]
进一步的,所述滤网为格栅结构。
[0015]
进一步的,所述风机组件包括固定罩和风机;
[0016]
所述驱动机构包括第一驱动结构和第二驱动结构,所述风机设置在所述固定罩的
内部,所述第一驱动结构的一端设置在所述固定罩的内侧壁,所述第一驱动结构的另一端与所述风机连接,用于驱动所述风机沿第一方向移动;
[0017]
所述第二驱动结构的一端与所述外壳的内侧壁连接,所述第二驱动结构的另一端与所述固定罩连接,用于驱动所述固定罩和所述风机沿第二方向移动;
[0018]
所述第一方向与所述第二方向相交。
[0019]
进一步的,所述第一驱动结构包括第一推杆电机和第二推杆电机;所述第一推杆电机设置在所述固定罩的一侧的内侧壁上,所述第二推杆电机设置在所述固定罩的另一侧的内侧壁上,且与所述第一推杆电机相对应;
[0020]
所述第二驱动结构包括第三推杆电机和第四推杆电机;所述第三推杆电机设置在所述外壳的一侧的内侧壁上,所述第四推杆电机设置在所述外壳的另一侧的内侧壁上,且与所述第三推杆电机相对应。
[0021]
本发明提供的油烟机的控制方法,包括:
[0022]
获取油烟机底部进风口处的不同位置的多个油烟浓度值;
[0023]
根据不同位置的多个油烟浓度值确定油烟处理的预设最佳位置;
[0024]
控制驱动机构驱动风机组件移动至所述预设最佳位置。
[0025]
进一步的,所述根据不同位置的多个油烟浓度值确定油烟处理的预设最佳位置的步骤包括:
[0026]
计算多个油烟浓度值中任意两个油烟浓度值的相加值,将所有的所述相加值进行比较,以获得其中的最大相加值;
[0027]
控制所述驱动机构驱动所述风机组件移动至与所述最大相加值对应的两个检测位置的直线连线的中点或者移动至设定直线上,该设定直线为过与所述最大相加值对应的两个检测位置的直线连线的中点且与该直线垂直的直线上。
[0028]
进一步的,所述控制所述驱动机构驱动所述风机组件移动至与所述最大相加值对应的两个检测位置的直线连线的中点或者移动至设定直线上,该设定直线为过与所述最大相加值对应的两个检测位置的直线连线的中点且与该直线垂直的直线上的步骤之后进行的:
[0029]
将与所述最大相加值对应的两个检测位置的油烟浓度值进行比较;
[0030]
当两个检测位置的油烟浓度值相等时,风机组件不移动;
[0031]
当其中的一个检测位置的油烟浓度值大于另一个检测位置的油烟浓度值时,控制驱动机构驱动所述风机组件向油烟浓度值较大的检测位置移动设定的单位距离。
[0032]
进一步的,所述当其中的一个检测位置的油烟浓度值大于另一个检测位置的油烟浓度值时,控制驱动机构驱动所述风机组件向油烟浓度值较大的检测位置移动设定的单位距离的步骤还包括,当两个检测位置的油烟浓度值的差值绝对值小于预设值时,风机组件不移动。
[0033]
本发明提供的油烟机,包括风机组件、驱动机构和油烟检测装置;所述油烟检测装置设置在油烟机底部的进风口处,用于检测所述烟机底部进风口处的不同位置的多个油烟浓度值;所述风机组件和所述驱动机构均设置在油烟机的外壳内部,所述油烟检测装置与所述驱动机构通讯连接,所述驱动机构与所述风机组件连接,所述驱动机构用于驱动所述风机组件在所述外壳内移动,以使所述风机组件能够移动至油烟处理的预设最佳位置,所
述预设最佳位置根据所述油烟检测装置检测的不同位置的多个油烟浓度值确定。
[0034]
驱动机构与风机组件连接且能够驱动风机组件在外壳内移动,使用时,根据油烟检测装置检测的油烟机底部进风口处的不同位置的多个油烟浓度值,并根据上述的不同位置的多个油烟浓度值确定油烟处理的预设最值位置,以使驱动机构带动风机组件在外壳内的移动至油烟处理的预设最佳位置,以实现精准吸烟;既能够保证吸烟效果,也能够实现风机组件性能的最大化使用,从而降低能耗。
[0035]
本发明提供的油烟机的控制方法,包括:获取油烟机底部进风口处的不同位置的多个油烟浓度值;根据不同位置的多个油烟浓度值确定油烟处理的预设最佳位置;控制驱动机构驱动所述风机组件移动至所述预设最佳位置。
[0036]
通过获取烟机底部进风口处不同位置的多个油烟浓度值,然后根据多个油烟浓度值确定油烟处理的预设最佳位置,再控制驱动机构驱动风机组件移动至预设最佳位置进行吸油烟工作,能够使得油烟快速吸入至油烟机中,达到最优的吸烟效果。
附图说明
[0037]
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0038]
图1为本发明实施例提供的油烟机的结构图;
[0039]
图2为本发明实施例提供的油烟机的剖视图;
[0040]
图3为本发明实施例提供的油烟机的俯视图;
[0041]
图4为本发明实施例提供的油烟机的仰视图;
[0042]
图5为本发明实施例提供的油烟机的控制方法的逻辑控制图;
[0043]
图6为本发明实施例提供的油烟机的风机中心点移动区域示意图。
[0044]
图标:100-风机组件;110-风机;120-固定罩;200-外壳;210-箱体;220-保护罩;300-第一弹性件;400-第二弹性件;500-滤网;610-第一推杆电机;620-第二推杆电机;630-第三推杆电机;640-第四推杆电机。
具体实施方式
[0045]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0046]
如图1至图6所示,本实施例提供的油烟机,具体包括风机组件100、驱动机构和油烟检测装置;所述油烟检测装置设置在油烟机底部的进风口处,用于检测所述油烟机底部进风口处的不同位置的多个油烟浓度值;所述风机组件100和所述驱动机构均设置在油烟机的外壳内部,所述油烟检测装置与所述驱动机构通讯连接,所述驱动机构与所述风机组件100连接,所述驱动机构用于驱动所述风机组件100在所述外壳内移动,以使所述风机组件100能够移动至油烟处理的预设最佳位置,所述预设最佳位置根据所述油烟检测装置检
测的不同位置的多个油烟浓度值确定。
[0047]
优选地,驱动机构驱动风机组件100在外壳200内部的水平面内移动。
[0048]
本实施例中,驱动机构驱动风机组件100在水平面内移动,油烟机底部进风口处的平面与风机组件100在外壳200内移动的水平面平行,驱动组件能够带动风机组件100在水平平面内做二维移动,从而使风机组件100能够在水平平面内与进风口处的平面相对应的位置移动,这样的好处为,以使风机组件100下端的进风口能够始终处于该水平面内的油烟处理的预设最佳位置。
[0049]
需要说明的是,驱动机构也可以驱动风机组件100在竖直平面内或者在水平面和竖直平面内移动,以使风机组件100在油烟机的外壳内的高度可以改变或者高度和水平位置均可以调节,从而使风机组件100在整个外壳的空间内的位置可调整,更好地适应油烟的不均匀分布,提高油烟处理的效果。
[0050]
油烟检测装置与所述驱动机构通讯连接,驱动机构与风机组件100连接且能够驱动风机组件100在外壳内移动,使用时,根据油烟检测装置检测的油烟机底部进风口处的不同位置的多个油烟浓度值,并根据上述的不同位置的多个油烟浓度值确定油烟处理的预设最值位置,以使驱动机构带动风机组件100在外壳内的移动至油烟处理的预设最佳位置,以实现精准吸烟;既能够保证吸烟效果,也能够实现风机组件100性能的最大化使用,从而降低能耗。
[0051]
本实施例中,预设最佳位置可以采用下述的油烟机的控制方法中的办法来确定。
[0052]
需要说明的是,预设最佳位置也可以为油烟检测装置检测的油烟浓度值最大的位置。
[0053]
需要说明的是,外壳200内的风机组件100移动的水平面的范围与灶具所在平面内占用的面积相对应,以使处于外壳200内的风机组件100的下端口能够移动至灶眼的上方,减少油烟的扩散逃逸的机率,快速在将油烟吸起,提高吸烟效果。
[0054]
进一步的,所述外壳200包括箱体210和保护罩220,所述箱体210的下端与所述保护罩220的上端连接;所述风机组件100的上端通过第一弹性件300与所述箱体210的上端连接,所述风机组件100的下端通过第二弹性件400与所述保护罩220的下端连接,所述第二弹性件400和所述保护罩220形成油烟机的集烟罩。
[0055]
具体地,第一弹性件300和第二弹性件400具体可以采用折叠结构,也可以采用柔性材料,能够满足风机组件100在外壳200内的移动,同时,还可以保持与外壳200之间的密封。
[0056]
本实施例中,第二弹性件的外侧面与保护罩的下端周向连接,第二弹性件的内侧面与风机组件100的下端周向连接,且第二弹性件的外侧面低与其内侧面,且由风机组件100朝向灶具方向,第二弹性件为敞口,具有更好的拢烟效果,故第二弹性件和保护罩形成了该油烟机的集烟罩。
[0057]
优选地,所述第一弹性件300和所述第二弹性件400均为阻燃橡胶。
[0058]
进一步的,所述油烟机还包括滤网,所述滤网设置在所述集烟罩的底部;所述油烟检测装置包括多个油烟浓度传感器,多个所述油烟浓度传感器间隔设置在所述滤网或者所述集烟罩的底面上;
[0059]
所述驱动机构用于驱动所述风机组件100在与所述滤网或者所述集烟罩的底面平
行的平面内移动。
[0060]
需要说明的是,当滤网设置在该油烟机的保护罩的底部的外侧时,多个油烟浓度传感器设置在滤网上,当滤网设置在上述的集烟罩的内部时,多个油烟浓度传感器设置在集烟罩的底面上,用于检测进风口所在平同内的不同位置的油烟浓度值。
[0061]
进一步的,所述滤网为矩形结构,多个所述油烟浓度传感器均布在所述滤网上。
[0062]
具体地,保护罩的下端设有滤网500,滤网500上设置有油烟检测装置,用于检测烟机底部进风口处的油烟浓度分布,并将风机组件100移动到所确定的油烟处理的预设最佳位置,从而提高油烟机吸油烟的效果。
[0063]
优选地,多个油烟浓度传感器均布在滤网500上。
[0064]
需要说明的是,优选地,该可移动风机110的烟机还可以包括控制器,多个油烟浓度传感器分别通过控制器与驱动机构连接,控制器能够接收油烟浓度传感器检测的油烟浓度值,控制器根据所接收的油烟浓度值进行比较,获理油烟处理的预设最佳位置,并能够向驱动机构发送控制信息,控制驱动机构驱动风机组件100移动至预设最佳位置,及时高效地将油烟吸走。
[0065]
本实施例中,所述油烟浓度传感器的数量为四个,且分别设置在所述滤网的四角。
[0066]
具体地,滤网500为矩形结构,油烟浓度传感器的数量为四个,且分别设置在滤网500的四角位置。
[0067]
如图4所示,滤网500上安装a、b、c、d四个油烟浓度传感器,a号传感器检测的油烟浓度值为a,b号传感器检测的油烟浓度值为b,c号传感器检测的油烟浓度值为c,d号传感器检测的油烟浓度值为d,当油烟机检测到油烟信号时,首先开启烟机风量,并计算a+b、b+c、c+d、d+a、a+c和b+d的相加值,取a+b、b+c、c+d、d+a、a+c和b+d的相加值中的最大相加值,风机组件100向最大相加值的两个油烟浓度传感器之间的设定位置(通过横向移动和纵向移动实现)移动;例如,该设定位置可以是两个油烟传感器直线连线的中点,当然,也可以为经过该点与直线连线的垂线上的其他点。然后再对比风机组件100移动方向的两个油烟浓度传感器的油烟浓度值的大小,风机组件100再向与油烟浓度值中较大值对应的油烟浓度传感器的方向移动,例如,当a+c最大时,横向的两个推杆电机将风机110向a、c号油烟浓度传感器的直线连线的中点移动;在横向的推杆电机移动的同时,对比a和c值对应的油烟浓度传感器的油烟浓度值的大小,当a>c时,纵向的两个推杆电机将风机组件100向a号油烟浓度传感器方向移动,反之,向c号油烟浓度传感器方向移动;当a、c值相等或差值绝对值小于某个常数时,则纵向的两个推杆电机不移动。
[0068]
当然,油烟浓度传感器数量可以为n个,n为自然数且n≥3,当n=3时,三个油烟浓度传感器获得的浓度值分别为x、y、z,当烟机检测到油烟信号时,首先开启烟机风量,并计算x+y、y+z、x+z的油烟浓度值的和,取x+y、y+z、x+z油烟浓度值之和中的最大值,风机组件100向浓度最大的方向移动;然后再对比风机组件100移动方向的两个油烟浓度传感器浓度大小,风机组件100再向浓度大的方向移动,例如当x+y最大时,对比x和y油烟浓度值的大小,当x>y时,推杆电机将风机110向x对应的油烟浓度传感器所在方向移动,反之,向y对应的油烟浓度传感器所在方向移动;当x、y值相等或差值绝对值小于某个常数时,则推杆电机不进行移动。
[0069]
进一步的,所述滤网为格栅结构。
[0070]
具体地,本实施例中,滤网上设置有多个条形通孔,形成格栅结构,无论外壳200内的风机组件100怎样移动,都能够保证油烟进入风道的入口是足够大的。
[0071]
进一步的,所述风机组件100包括固定罩和风机110;所述驱动机构包括第一驱动结构和第二驱动结构,所述风机110设置在所述固定罩的内部,所述第一驱动结构的一端设置在所述固定罩的内侧壁,所述第一驱动结构的另一端与所述风机110连接,用于驱动所述风机110在固定罩内沿第一方向移动;所述第二驱动结构的一端与所述外壳的内侧壁连接,所述第二驱动结构的另一端与所述固定罩连接,用于驱动所述固定罩和所述风机110一起沿第二方向移动;述第一方向与所述第二方向相交。
[0072]
本实施例中,所述第一方向与所述第二方向垂直。
[0073]
优选地,所述第一驱动结构包括第一推杆电机610和第二推杆电机620;所述第一推杆电机610设置在所述固定罩120的一侧的内侧壁上,所述第二推杆电机620设置在所述固定罩120的另一侧的内侧壁上,且与所述第一推杆电机610相对应;所述第二驱动结构包括第三推杆电机630和第四推杆电机640;所述第三推杆电机630设置在所述外壳200的一侧的内侧壁上,所述第四推杆电机640设置在所述外壳200的另一侧的内侧壁上,且与所述第三推杆电机630相对应。
[0074]
本实施例中,第一方向为左右方向,第二方向为前后方向。
[0075]
如图3所示,风机组件100由横向的两个推杆电机(第一推杆电机610和第二推杆电机620)固定在固定罩120内侧,可控制风机110左右移动,烟机的外壳200在纵向与固定罩120有间隙;固定罩120由纵向的两个推杆电机(第三推杆电机630和第四推杆电机640)固定在外壳200的内侧壁,可控制固定罩120和风机110前后移动。固定罩120与外壳200沿横向之间有间隙,可实现横向和纵向同时移动。驱动机构根据油烟检测装置提供的油烟信号,在需要进行移动的时候,驱动机构根据相对应方向的推杆电机将可移动风机110推动到相应位置,从而实现将油烟直接吸入烟道快速排出的效果。
[0076]
当图3左上角油烟浓度较强时,第三推杆电机630缩短距离等于第四推杆电机640伸长距离,第一推杆电机610缩短距离等于第二推杆电机620伸长距离,将风机110移动到左上角油烟浓度较浓的位置;当图3右上角油烟浓度较强时,第三推杆电机630缩短距离等于第四推杆电机640伸长距离,第一推杆电机610伸长距离等于第二推杆电机620缩短距离,将风机110移动到右上角油烟浓度较浓的位置;当图3左下角油烟浓度较强时,第三推杆电机630伸长距离等于第四推杆电机640缩短距离,第一推杆电机610缩短距离等于第二推杆电机620伸长距离,将风机110移动到左下角油烟浓度较浓的位置;当图3右下角油烟浓度较强时,第三推杆电机630伸长距离等于第四推杆电机640缩短距离,第一推杆电机610伸长距离等于第二推杆电机620缩短距离,将风机110移动到右下角油烟浓度较浓的位置。
[0077]
如图6所示,本实施例中,o为风机110的中心位置,外部的大矩形表示外壳200的内轮廓线,风机110中心点的位移区域为中间阴影部分,风机110的长为l,宽为m,小矩形(阴影部分)与大矩形上、下距离均为m1,小矩形(阴影部分)与大矩形左、右距离均为l1。本实施例中m1为0.5m,l1为0.5l。需要说明的是,外壳200也可以为圆形结构,对应的风机110也可以为圆形。
[0078]
本发明提供的油烟机的控制方法,包括:获取油烟机底部进风口处的不同位置的多个油烟浓度值;根据不同位置的多个油烟浓度值确定油烟处理的预设最佳位置;控制驱
动机构驱动所述风机组件100移动至所述预设最佳位置。
[0079]
通过获取烟机底部进风口处不同位置的多个油烟浓度值,然后根据多个油烟浓度值确定油烟处理的预设最佳位置,再控制驱动机构驱动风机组件100移动至预设最佳位置进行吸油烟工作,能够使得油烟快速吸入至油烟机中,达到最优的吸烟效果。
[0080]
进一步的,所述根据不同位置的多个油烟浓度值确定油烟处理的预设最佳位置的步骤包括:计算多个油烟浓度值中任意两个油烟浓度值的相加值,将所有的所述相加值进行比较,以获得其中的最大相加值。
[0081]
控制所述驱动机构驱动所述风机组件100移动至与所述最大相加值对应的两个检测位置的直线连线的中点或者移动至设定直线上,该设定直线为过与所述最大相加值对应的两个检测位置的直线连线的中点且与该直线垂直的直线上。
[0082]
需要说明的是,驱动机构可以驱动风机组件100移动至上述的两个检测位置的直线连线的中点位置,也可以移动至设定直线上的任一点,该设定直线为过两相检测位置的直线连线的中点,且与该直线连线垂直的直线,即风机组件100的位置到两个检测位置的直线距离相等。
[0083]
进一步的,所述控制所述驱动机构驱动所述风机组件100移动至与所述最大相加值对应的两个检测位置的直线连线的中点或者移动至设定直线上,该设定直线为过与所述最大相加值对应的两个检测位置的直线连线的中点且与该直线垂直的直线上的步骤之后进行的:将与所述最大相加值对应的两个检测位置的油烟浓度值进行比较;当两个检测位置的油烟浓度值相等时,风机组件100不移动;当其中的一个检测位置的油烟浓度值大于另一个检测位置的油烟浓度值时,控制驱动机构驱动所述风机组件100向油烟浓度值较大的检测位置移动设定的单位距离。
[0084]
进一步的,所述当其中的一个检测位置的油烟浓度值大于另一个检测位置的油烟浓度值时,控制驱动机构驱动所述风机组件100向油烟浓度值较大的检测位置移动设定的单位距离的步骤还包括,当两个检测位置的油烟浓度值的差值绝对值小于预设值时,风机组件100不移动。
[0085]
具体地,通过设置在烟机底部进风口处的多个油烟浓度传感器检测不同位置的多个油烟浓度值,然后从多个油烟浓度值中任取两个值进行两两相加求和,取相加值中的最大值相加值,然后控制风机组件100向与最大相加值对应的两个油烟浓度传感器之间的某一位置(可以为两个油烟浓度传感器直线连线的中点或者过与所述最大相加值对应的两个检测位置的直线连线的中点且与该直线垂直的直线上)进行移动,然后再将两个油烟浓度值进行比较,当两个值相等时,风机组件100不移动;当两个值不相等时,风机组件100向浓度较大的油烟浓度传感器对应的位置移动设定的单位距离。
[0086]
需要说明的是,当检测到油烟浓度下降到一定值或者用户关机时,驱动机构带动风机组件100复位,该位置可以为水平平面内的任一设定位置。
[0087]
如图5所示,本实施例提供的油烟机的控制方法的逻辑控制如下:
[0088]
1)烟机上电,检测探头开始工作;是否检测到油烟溢出,如果否,返回上一步。
[0089]
具体地,包括检测温度或者油烟,检测探头可以为红外传感器/油烟浓度传感器,当检测探头检测到温度/油烟,则开启烟机并开启烟机档位。
[0090]
2)开启烟机档位,n个油烟浓度传感器实时监测油烟浓度;从n个油烟浓度值中任
取两个值;进行两两相加,取得c
n2
个相加值,取得c
n2
个相加值中的最大值,如果未取得最大值,则返回开启烟机档位,n个油烟浓度传感器实时监测油烟浓度这一步,如果取得最大值,风机组件100移动至预设最佳位置。
[0091]
n个油烟浓度传感器开始检测油烟从而获得n个油烟浓度值(n为自然数,且n≥3);烟浓度传感器将n个油烟浓度值发送给控制器,在控制器内n个油烟浓度值任取两个数并进行两两求和,取得c
n2
个相加值。
[0092]
取求和值中的最大相加值,获得与最大值对应的两个油烟传感器位置。
[0093]
控制器向驱动机构的推杆电机发送控制信息,推杆电机开始动作,将风机110移动到上述的两个油烟传感器位置之间的预设最佳位置,本实施例中,预设最佳位置可以为两个油烟传感器位置的直线连线的中点。当然,预设位置还可以是中点的延长线。
[0094]
3)获得与最大值对应的两个油烟浓度传感器位置及对应的油烟浓度值,例如:浓度值分别为a和b。
[0095]
4)比较计算a和b的大小;根据比较结果,控制驱动机构带动风机组件100进行移动。
[0096]
如果a-b=0,风机组件100不动作;判断风机组件100位于预设最佳位置进行吸油烟工作,能够使得油烟快速吸入至油烟机中,而使得外部的油烟浓度保持在良好的状态,此时风机组件100保持当前的位置。
[0097]
如果a-b>0,风机组件100向a浓度传感器所在位置移动设定的单位距离,则控制风机组件100向浓度值较大值a的油烟浓度传感器所在方向移动,移动距离为设定的单位距离,该位置作为最新的预设最佳值。
[0098]
如果a-b<0,风机组件100向b浓度传感器所在位置移动设定的单位距离,则控制风机组件100向浓度值较大值b的油烟浓度传感器所在方向移动,移动距离为设定的单位距离。
[0099]
5)当检测到烟机关闭/油烟浓度值小于某个常数时,风机组件100进行复位动作。
[0100]
综上所述,本发明提供的油烟机,包括风机组件100、驱动机构和油烟检测装置;所述油烟检测装置设置在油烟机底部的进风口处,用于检测所述烟机底部进风口处的不同位置的多个油烟浓度值;所述风机组件100和所述驱动机构均设置在油烟机的外壳内部,所述油烟检测装置与所述驱动机构通讯连接,所述驱动机构与所述风机组件100连接,所述驱动机构用于驱动所述风机组件100在所述外壳内移动,以使所述风机组件100能够移动至油烟处理的预设最佳位置,所述预设最佳位置根据所述油烟检测装置检测的不同位置的多个油烟浓度值确定。驱动机构与风机组件100连接且能够驱动风机组件100在外壳内移动,使用时,根据油烟检测装置检测的油烟机底部进风口处的不同位置的多个油烟浓度值,并根据上述的不同位置的多个油烟浓度值确定油烟处理的预设最值位置,以使驱动机构带动风机组件100在外壳内的移动至油烟处理的预设最佳位置,以实现精准吸烟;既能够保证吸烟效果,也能够实现风机组件100性能的最大化使用,从而降低能耗。
[0101]
本发明提供的油烟机的控制方法,包括:获取油烟机底部进风口处的不同位置的多个油烟浓度值;根据不同位置的多个油烟浓度值确定油烟处理的预设最佳位置;控制驱动机构驱动所述风机组件100移动至所述预设最佳位置。通过获取烟机底部进风口处不同位置的多个油烟浓度值,然后根据多个油烟浓度值确定油烟处理的预设最佳位置,再控制
驱动机构驱动风机组件100移动至预设最佳位置进行吸油烟工作,能够使得油烟快速吸入至油烟机中,达到最优的吸烟效果。
[0102]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 抽油烟机

 热门咨询
热门咨询




tips