
 商标分类
商标分类  商标转让
商标转让 
一种扇形电缆的智能化自动加工设备的制作方法
 2021-02-23 23:02:00|
2021-02-23 23:02:00| 442|
442| 起点商标网
起点商标网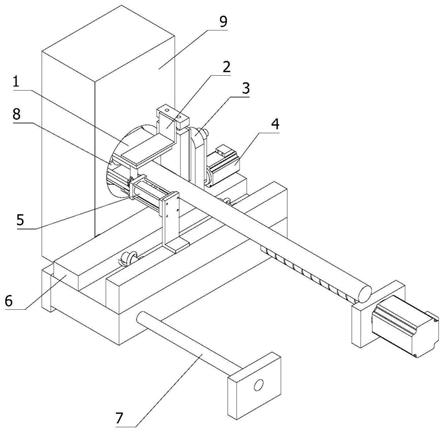
[0001]
本发明涉及电缆加工设备技术领域,具体是涉及一种扇形电缆的智能化自动加工设备。
背景技术:
[0002]
电缆是一种电能或信号传输装置,通常是由几根或几组导线组成;
[0003]
定义1:由一根或多根相互绝缘的导体和外包绝缘保护层制成,将电力或信息从一处传输到另一处的导线。
[0004]
定义2:通常是由几根或几组导线(每组至少两根)绞合而成的类似绳索的电缆,每组导线之间相互绝缘,并常围绕着一根中心扭成,整个外面包有高度绝缘的覆盖层。电缆具有内通电,外绝缘的特征。
[0005]
电缆一般多根导线缠绕组成,而多根导线直接缠绕后的电缆内部具有空隙。在电缆的生产制造过程中,为了降低成本,常常将多根缠绕的电缆进行压型,压型后的电缆呈扇形,此时,电缆的截面积变小,相应的绝缘保护材料的用量也会减少,降低了电缆的生产制造成本。
[0006]
中国专利:cn201810939147.5公开了一种扇形电缆成型装置以及扇形电缆成型方法,包括:固定座、具有成型孔的成型模具以及压块;成型模具设置在电缆上并且位于固定座内,压块固定在电缆上并且位于固定座的外侧。压块在电缆的移动下挤压成型模具,成型模具再挤压电缆,最终将电缆挤压成扇形电缆。本发明的结构简单,操作简便,节省了设备成本和人工成本,不但可以使同一批次的扇形电缆外形尺寸保持一致,还可以使相同尺寸但不同批次扇形电缆外形尺寸保持一致。
[0007]
但是此专利中成型模具的安装方式会导致电缆端部被拉长变形,这样便会造成不必要的浪费,所以需要提出一种扇形电缆的智能化自动加工设备,可以辅助成型模具进行安装,保证了成型模块可以直接安装到位,提高了生产质量,避免了电缆的浪费。
技术实现要素:
[0008]
为解决上述技术问题,提供一种扇形电缆的智能化自动加工设备,本技术方案可以辅助成型模具进行安装,保证了成型模块可以直接安装到位,提高了生产质量,避免了电缆的浪费。
[0009]
为达到以上目的,本发明采用的技术方案为:
[0010]
一种扇形电缆的智能化自动加工设备,包括:
[0011]
成型模具,成型模具包括有第一成型件和第二成型件,第一成型件和第二成型件用于供电缆穿过并使其成型;
[0012]
固定座,固定座上设置有通孔、导向孔、凸台和通绳孔,通孔用于使成型模具穿过,导向孔用于固定成型模具的位置,凸台防止成型模具滑动,通绳孔用于供电缆穿过;
[0013]
包括:
[0014]
辅助夹紧件,辅助夹紧件有两个,两个辅助夹紧件分别设置于第一成型件和第二成型件的非工作部;
[0015]
开合夹紧机构,开合夹紧机构有两个输出端,辅助夹紧件分别设置于开合夹紧机构的两个输出端,开合夹紧机构用于驱动两个辅助夹紧件互相靠近;
[0016]
旋转连动组件和旋转驱动组件,开合夹紧机构设置于旋转连动组件的输出端,旋转驱动组件设置于旋转连动组件的受力端并与其传动连接,旋转驱动组件用于通过旋转连动组件驱动开合夹紧机构转动;
[0017]
冲模组件和回弹组件,旋转连动组件设置于回弹组件的输出端,冲模组件设置于回弹组件的非工作部,冲模组件用于将内的成型模具推入导向孔内并且使其抵触凸台,回弹组件用于带动旋转连动组件回位;
[0018]
直线驱动器,回弹组件设置于直线驱动器的输出端,直线驱动器用于驱动回弹组件进行直线运动。
[0019]
优选的,辅助夹紧件包括:
[0020]
月牙板和连动板,连动板位于月牙板的一面,并且连动板与月牙板固定连接,连动板上对称设置有贯穿孔。
[0021]
优选的,开合夹紧机构包括:
[0022]
宽阔手指气缸;
[0023]
第一夹板和第二夹板,第一夹板和第二夹板分别设置于宽阔手指气缸的两个输出端,并且第一夹板和第二夹板均与宽阔手指气缸固定连接,第一夹板的底部对称设置有套筒,第二夹板的顶部对称设置有插杆。
[0024]
优选的,旋转连动组件包括:
[0025]
转动板,设置于开合夹紧机构的非工作部;
[0026]
转动杆,转动杆的一端与转动板的一侧固定连接;
[0027]
轴承座,设置于回弹组件的活动端,转动杆贯穿轴承座并与其可转动连接,转动杆的另一端与旋转驱动组件的输出端传动连接。
[0028]
优选的,旋转驱动组件包括:
[0029]
第一伺服电机,设置于回弹组件的活动端;
[0030]
第一皮带轮,设置于第一伺服电机的输出端;
[0031]
第二皮带轮,设置于转动杆的受力端,并且第一皮带轮与第二皮带轮通过皮带传动连接。
[0032]
优选的,冲模组件包括:
[0033]
气缸架,设置于回弹组件的非工作部,气缸架上设置有滑轨;
[0034]
推动气缸,设置于气缸架上;
[0035]
推板,设置于推动气缸的输出端,推板上设置有滑块,滑块与滑轨滑动连接。
[0036]
优选的,回弹组件包括:
[0037]
立板,设置于直线驱动器的输出端,气缸架设置于立板的顶部;
[0038]
限位杆,对称设置于立板的一面;
[0039]
活动块,套设于限位杆上并与其滑动连接;
[0040]
拉簧,套设于限位杆上,并且拉簧的两端分别与立板和活动块连接。
[0041]
优选的,直线驱动器包括:
[0042]
驱动组件和导向组件,驱动组件和导向组件对称设置于回弹组件的两侧;
[0043]
第二伺服电机,设置于驱动组件的受力端;
[0044]
工作块,工作块的一端与驱动组件的输出端传动连接,工作块的另一端与导向组件的滑动连接。
[0045]
优选的,驱动组件包括:
[0046]
螺纹杆,螺纹杆贯穿工作块的一端并与其螺纹连接;
[0047]
第一立板和第二立板,第一立板和第二立板分别设置于螺纹杆的两端并与其可转动连接,第二伺服电机设置于第一立板上,并且第二伺服电机的输出端与螺纹杆连接。
[0048]
优选的,导向组件包括:
[0049]
导向杆,导向杆贯穿工作块的另一端并与其滑动连接;
[0050]
第三立板和第四立板,第三立板和第四立板分别设置于导向杆的两端并与其固定连接。
[0051]
本发明与现有技术相比具有的有益效果是:首先工作人员需要将辅助夹紧件分别安装于第一成型件和第二成型件的非工作部,再将两个辅助夹紧件分别安装于开合夹紧机构的两个输出端,此时第一成型件和第二成型件均处于水平状态,然后工作人员在将电缆的端部放置于第一成型件和第二成型件之间,开合夹紧机构开始工作,开合夹紧机构的输出端带动两个辅助夹紧件互相靠近,两个辅助夹紧件带动第一成型件和第二成型件互相靠近,通过第一成型件和第二成型件将电缆夹紧,并且第一成型件和第二成型件的工作部使其成型,旋转驱动组件开始工作,旋转驱动组件的输出端带动旋转连动组件进行转动,旋转连动组件带动开合夹紧机构旋转九十度,开合夹紧机构通过两个辅助夹紧件带动第一成型件和第二成型件旋转九十度,此时电缆的端部朝向固定座的通绳孔,直线驱动器开始工作,直线驱动器的输出端带动回弹组件进行移动,回弹组件靠近固定座并使得第一成型件和第二成型件位于通孔内,由于导向孔需要第一成型件和第二成型件非常紧密的靠近和推动力才可以推入其中,所以冲模组件开始工作,冲模组件的输出端推动成型模具的尾部使其进入导向孔内,成型模具的首部抵触凸台,由于成型模具通过两个辅助夹紧件与开合夹紧机构还处于连接状态,所以在成型模具移动的过程中旋转连动组件随其小范围的移动,然后再冲模组件工作端收回的同时开合夹紧机构的输出端也进行收回,这时回弹组件的输出端带动旋转连动组件回位,成型模具的安装完成,工作完毕;
[0052]
1、通过辅助夹紧件和开合夹紧机构的设置,可以是成型模具完成合拢;
[0053]
2、通过本设备的设置,可以辅助成型模具进行安装,保证了成型模块可以直接安装到位,提高了生产质量,避免了电缆的浪费。
附图说明
[0054]
图1为本发明的成型模具和固定座的内部结构示意图;
[0055]
图2为本发明的固定座的内部结构示意图;
[0056]
图3为本发明的成型模具的立体结构示意图;
[0057]
图4为本发明的立体结构示意图;
[0058]
图5为本发明的成型模具和辅助夹紧件的立体结构示意图;
[0059]
图6为本发明的成型模具、辅助夹紧件、开合夹紧机构、旋转连动组件和旋转驱动组件的立体结构示意图一;
[0060]
图7为本发明的成型模具、辅助夹紧件、开合夹紧机构、旋转连动组件和旋转驱动组件的立体结构示意图二;
[0061]
图8为本发明的成型模具、辅助夹紧件、开合夹紧机构、旋转连动组件和旋转驱动组件、冲模组件和回弹组件的主视图;
[0062]
图9为本发明的成型模具、辅助夹紧件、开合夹紧机构、旋转连动组件和旋转驱动组件、冲模组件和回弹组件的立体结构示意图;
[0063]
图10为本发明的直线驱动器的立体结构示意图一;
[0064]
图11为本发明的直线驱动器的立体结构示意图二。
[0065]
图中标号为:
[0066]
1-辅助夹紧件;1a-月牙板;1b-连动板;1c-贯穿孔;
[0067]
2-开合夹紧机构;2a-宽阔手指气缸;2b-第一夹板;2b1-套筒;2c-第二夹板;2c1-插杆;
[0068]
3-旋转连动组件;3a-转动板;3b-转动杆;3c-轴承座;
[0069]
4-旋转驱动组件;4a-第一伺服电机;4b-第一皮带轮;4c-第二皮带轮;
[0070]
5-冲模组件;5a-气缸架;5a1-滑轨;5b-推动气缸;5c-推板;5c1-滑块;
[0071]
6-回弹组件;6a-立板;6b-限位杆;6c-活动块;6d-拉簧;
[0072]
7-直线驱动器;7a-驱动组件;7a1-第一立板;7a2-第二立板;7a3-螺纹杆;7b-第二伺服电机;7c-导向组件;7c1-第三立板;7c2-第四立板;7c3-导向杆;7d-工作块;
[0073]
8-成型模具;8a-第一成型件;8b-第二成型件;
[0074]
9-固定座;9a-通孔;9b-导向孔;9c-凸台;9d-通绳孔;
[0075]
10-电缆。
具体实施方式
[0076]
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
[0077]
参照图1至图4所示,一种扇形电缆的智能化自动加工设备,包括:
[0078]
成型模具8,成型模具8包括有第一成型件8a和第二成型件8b,第一成型件8a和第二成型件8b用于供电缆穿过并使其成型;
[0079]
固定座9,固定座9上设置有通孔9a、导向孔9b、凸台9c和通绳孔9d,通孔9a用于使成型模具8穿过,导向孔9b用于固定成型模具8的位置,凸台9c防止成型模具8滑动,通绳孔9d用于供电缆穿过;
[0080]
其特征在于,包括:
[0081]
辅助夹紧件1,辅助夹紧件1有两个,两个辅助夹紧件1分别设置于第一成型件8a和第二成型件8b的非工作部;
[0082]
开合夹紧机构2,开合夹紧机构2有两个输出端,辅助夹紧件1分别设置于开合夹紧机构2的两个输出端,开合夹紧机构2用于驱动两个辅助夹紧件1互相靠近;
[0083]
旋转连动组件3和旋转驱动组件4,开合夹紧机构2设置于旋转连动组件3的输出
端,旋转驱动组件4设置于旋转连动组件3的受力端并与其传动连接,旋转驱动组件4用于通过旋转连动组件3驱动开合夹紧机构2转动;
[0084]
冲模组件5和回弹组件6,旋转连动组件3设置于回弹组件6的输出端,冲模组件5设置于回弹组件6的非工作部,冲模组件5用于将a0内的成型模具8推入导向孔9b内并且使其抵触凸台9c,回弹组件6用于带动旋转连动组件3回位;
[0085]
直线驱动器7,回弹组件6设置于直线驱动器7的输出端,直线驱动器7用于驱动回弹组件6进行直线运动;
[0086]
首先工作人员需要将辅助夹紧件1分别安装于第一成型件8a和第二成型件8b的非工作部,再将两个辅助夹紧件1分别安装于开合夹紧机构2的两个输出端,此时第一成型件8a和第二成型件8b均处于水平状态,然后工作人员在将电缆的端部放置于第一成型件8a和第二成型件8b之间,开合夹紧机构2开始工作,开合夹紧机构2的输出端带动两个辅助夹紧件1互相靠近,两个辅助夹紧件1带动第一成型件8a和第二成型件8b互相靠近,通过第一成型件8a和第二成型件8b将电缆夹紧,并且第一成型件8a和第二成型件8b的工作部使其成型,旋转驱动组件4开始工作,旋转驱动组件4的输出端带动旋转连动组件3进行转动,旋转连动组件3带动开合夹紧机构2旋转九十度,开合夹紧机构2通过两个辅助夹紧件1带动第一成型件8a和第二成型件8b旋转九十度,此时电缆的端部朝向固定座9的通绳孔9d,直线驱动器7开始工作,直线驱动器7的输出端带动回弹组件6进行移动,回弹组件6靠近固定座9并使得第一成型件8a和第二成型件8b位于通孔9a内,由于导向孔9b需要第一成型件8a和第二成型件8b非常紧密的靠近和推动力才可以推入其中,所以冲模组件5开始工作,冲模组件5的输出端推动成型模具8的尾部使其进入导向孔9b内,成型模具8的首部抵触凸台9c,由于成型模具8通过两个辅助夹紧件1与开合夹紧机构2还处于连接状态,所以在成型模具8移动的过程中旋转连动组件3随其小范围的移动,然后再冲模组件5工作端收回的同时开合夹紧机构2的输出端也进行收回,这时回弹组件6的输出端带动旋转连动组件3回位,成型模具8的安装完成,工作完毕。
[0087]
如图5所示辅助夹紧件1包括:
[0088]
月牙板1a和连动板1b,连动板1b位于月牙板1a的一面,并且连动板1b与月牙板1a固定连接,连动板1b上对称设置有贯穿孔1c;
[0089]
开合夹紧机构2开始工作,开合夹紧机构2的两个输出端分别穿过两个辅助夹紧件1的连动板1b的贯穿孔1c,以此来防止两个辅助夹紧件1转动,并且开合夹紧机构2的两个输出端带动两个辅助夹紧件1的连动板1b互相靠近,两个月牙板1a分别带动第一成型件8a和第二成型件8b互相靠近合拢。
[0090]
如图6所示开合夹紧机构2包括:
[0091]
宽阔手指气缸2a;
[0092]
第一夹板2b和第二夹板2c,第一夹板2b和第二夹板2c分别设置于宽阔手指气缸2a的两个输出端,并且第一夹板2b和第二夹板2c均与宽阔手指气缸2a固定连接,第一夹板2b的底部对称设置有套筒2b1,第二夹板2c的顶部对称设置有插杆2c1;
[0093]
工作人员将两个辅助夹紧件1通过贯穿孔1c分别套设于套筒2b1和插杆2c1上,然后宽阔手指气缸2a开始工作,宽阔手指气缸2a的两个输出端分别带动第一夹板2b和第二夹板2c互相靠近,插杆2c1插入进套筒2b1内,直至第一成型件8a和第二成型件8b互相靠近并
合拢。
[0094]
如图7所示旋转连动组件3包括:
[0095]
转动板3a,设置于开合夹紧机构2的非工作部;
[0096]
转动杆3b,转动杆3b的一端与转动板3a的一侧固定连接;
[0097]
轴承座3c,设置于回弹组件6的活动端,转动杆3b贯穿轴承座3c并与其可转动连接,转动杆3b的另一端与旋转驱动组件4的输出端传动连接;
[0098]
旋转驱动组件4的输出端带动转动杆3b的受力端转动,转动杆3b带动转动板3a转动,转动板3a带动开合夹紧机构2转动九十度,轴承座3c用于固定支撑。
[0099]
如图7所示旋转驱动组件4包括:
[0100]
第一伺服电机4a,设置于回弹组件6的活动端;
[0101]
第一皮带轮4b,设置于第一伺服电机4a的输出端;
[0102]
第二皮带轮4c,设置于转动杆3b的受力端,并且第一皮带轮4b与第二皮带轮4c通过皮带传动连接;
[0103]
旋转驱动组件4开始工作,第一伺服电机4a的输出端带动第一皮带轮4b转动,第一皮带轮4b通过皮带带动第二皮带轮4c转动,第二皮带轮4c带动转动杆3b转动。
[0104]
如图8所示冲模组件5包括:
[0105]
气缸架5a,设置于回弹组件6的非工作部,气缸架5a上设置有滑轨5a1;
[0106]
推动气缸5b,设置于气缸架5a上;
[0107]
推板5c,设置于推动气缸5b的输出端,推板5c上设置有滑块5c1,滑块5c1与滑轨5a1滑动连接;
[0108]
冲模组件5开始工作,推动气缸5b的输出端推动推板5c,推板5c将成型模具8推入导向孔9b内,气缸架5a用于固定支撑,滑轨5a1和滑块5c1用于对推板5c的移动方向进行引导。
[0109]
如图9所示回弹组件6包括:
[0110]
立板6a,设置于直线驱动器7的输出端,气缸架5a设置于立板6a的顶部;
[0111]
限位杆6b,对称设置于立板6a的一面;
[0112]
活动块6c,套设于限位杆6b上并与其滑动连接;
[0113]
拉簧6d,套设于限位杆6b上,并且拉簧6d的两端分别与立板6a和活动块6c连接;
[0114]
推动气缸5b的输出端推动推板5c,推板5c将成型模具8推入导向孔9b内,由于成型模具8通过两个辅助夹紧件1与开合夹紧机构2还处于连接状态,所以在成型模具8移动的过程中旋转连动组件3随其小范围的移动,活动块6c随旋转连动组件3一同移动,然后当推动气缸5b带动推板5c回收和开合夹紧机构2松开对辅助夹紧件1的固定时,拉簧6d拉动活动块6c回位,活动块6c带动旋转连动组件3回位,立板6a用于固定支撑,限位杆6b用于引导活动块6c的移动方向和支撑拉簧6d。
[0115]
如图10所示直线驱动器7包括:
[0116]
驱动组件7a和导向组件7c,驱动组件7a和导向组件7c对称设置于回弹组件6的两侧;
[0117]
第二伺服电机7b,设置于驱动组件7a的受力端;
[0118]
工作块7d,工作块7d的一端与驱动组件7a的输出端传动连接,工作块7d的另一端
与导向组件7c的滑动连接;
[0119]
直线驱动器7开始工作,第二伺服电机7b的输出端带动驱动组件7a的受力端转动,驱动组件7a的输出端带动工作块7d沿导向组件7c进行移动。
[0120]
如图11所示驱动组件7a包括:
[0121]
螺纹杆7a3,螺纹杆7a3贯穿工作块7d的一端并与其螺纹连接;
[0122]
第一立板7a1和第二立板7a2,第一立板7a1和第二立板7a2分别设置于螺纹杆7a3的两端并与其可转动连接,第二伺服电机7b设置于第一立板7a1上,并且第二伺服电机7b的输出端与螺纹杆7a3连接;
[0123]
第二伺服电机7b的输出端带动螺纹杆7a3转动,螺纹杆7a3带动工作块7d沿导向组件7c进行移动,第一立板7a1和第二立板7a2用于固定支撑。
[0124]
如图11所示导向组件7c包括:
[0125]
导向杆7c3,导向杆7c3贯穿工作块7d的另一端并与其滑动连接;
[0126]
第三立板7c1和第四立板7c2,第三立板7c1和第四立板7c2分别设置于导向杆7c3的两端并与其固定连接;
[0127]
第二伺服电机7b的输出端带动螺纹杆7a3转动,螺纹杆7a3带动工作块7d沿第三立板7c1进行移动,第三立板7c1和第四立板7c2用于固定支撑。
[0128]
本发明的工作原理:首先工作人员需要将两个辅助夹紧件1分别安装于第一成型件8a和第二成型件8b的非工作部,然后分别将两个辅助夹紧件1通过贯穿孔1c套设于套筒2b1和2b2上,此时第一成型件8a和第二成型件8b均处于水平状态,然后工作人员在将电缆的端部放置于第一成型件8a和第二成型件8b之间,开合夹紧机构2开始工作,宽阔手指气缸2a开始工作,宽阔手指气缸2a的两个输出端分别带动第一夹板2b和第二夹板2c互相靠近,插杆2c1插入进套筒2b1内,直至第一成型件8a和第二成型件8b互相靠近并合拢将电缆夹紧,并且第一成型件8a和第二成型件8b的工作部使电缆成型,旋转驱动组件4开始工作,第一伺服电机4a的输出端带动第一皮带轮4b转动,第一皮带轮4b通过皮带带动第二皮带轮4c转动,第二皮带轮4c带动转动杆3b转动,转动杆3b带动转动板3a转动,转动板3a带动开合夹紧机构2转动九十度,开合夹紧机构2通过两个辅助夹紧件1带动第一成型件8a和第二成型件8b旋转九十度,此时电缆的端部朝向固定座9的通绳孔9d,直线驱动器7开始工作,第二伺服电机7b的输出端带动螺纹杆7a3转动,螺纹杆7a3带动工作块7d沿第三立板7c1进行移动,第三立板7c1带动回弹组件6进行移动,回弹组件6靠近固定座9并使得第一成型件8a和第二成型件8b位于通孔9a内,由于导向孔9b需要第一成型件8a和第二成型件8b非常紧密的靠近和推动力才可以推入其中,所以冲模组件5开始工作,推动气缸5b的输出端推动推板5c,推板5c将成型模具8推入导向孔9b内,成型模具8的首部抵触凸台9c,由于成型模具8通过两个辅助夹紧件1与开合夹紧机构2还处于连接状态,所以在成型模具8移动的过程中旋转连动组件3随其小范围的移动,活动块6c随旋转连动组件3一同移动,然后当推动气缸5b带动推板5c回收和开合夹紧机构2松开对辅助夹紧件1的固定时,拉簧6d拉动活动块6c回位,活动块6c带动旋转连动组件3回位,成型模具8的安装完成,工作完毕。
[0129]
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
[0130]
步骤一、工作人员需要将辅助夹紧件1分别安装于第一成型件8a和第二成型件8b的非工作部;
[0131]
步骤二、将两个辅助夹紧件1分别安装于开合夹紧机构2的两个输出端;
[0132]
步骤三、工作人员在将电缆的端部放置于第一成型件8a和第二成型件8b之间;
[0133]
步骤四、开合夹紧机构2开始工作,开合夹紧机构2的输出端带动两个辅助夹紧件1互相靠近,两个辅助夹紧件1带动第一成型件8a和第二成型件8b互相靠近,通过第一成型件8a和第二成型件8b将电缆夹紧;
[0134]
步骤五、旋转驱动组件4开始工作,旋转驱动组件4的输出端带动旋转连动组件3进行转动,旋转连动组件3带动开合夹紧机构2旋转九十度,开合夹紧机构2通过两个辅助夹紧件1带动第一成型件8a和第二成型件8b旋转九十度,此时电缆的端部朝向固定座9的通绳孔9d;
[0135]
步骤六、直线驱动器7开始工作,直线驱动器7的输出端带动回弹组件6进行移动,回弹组件6靠近固定座9并使得第一成型件8a和第二成型件8b位于通孔9a内;
[0136]
步骤七、冲模组件5开始工作,冲模组件5的输出端推动成型模具8的尾部使其进入导向孔9b内,成型模具8的首部抵触凸台9c;
[0137]
步骤八、冲模组件5工作端收回的同时开合夹紧机构2的输出端也进行收回,这时回弹组件6的输出端带动旋转连动组件3回位;
[0138]
步骤九、成型模具8的安装完成,工作完毕。
[0139]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips