
 商标分类
商标分类  商标转让
商标转让 
口罩成型机及成型方法与流程
 2021-02-22 19:02:18|
2021-02-22 19:02:18| 129|
129| 起点商标网
起点商标网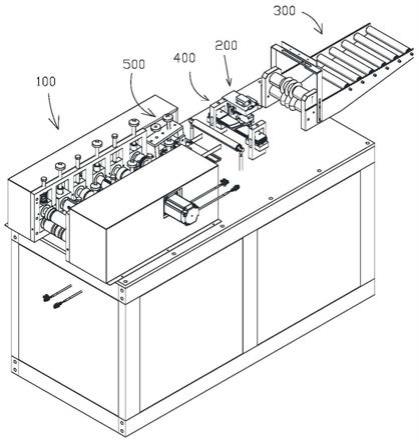
[0001]
本发明涉及口罩加工技术领域,尤其涉及一种口罩成型机及成型方法。
背景技术:
[0002]
口罩是一种卫生用品,指戴在口鼻部位用于过滤进入口鼻的空气,以达到阻挡有害的气体、气味、飞沫等进出佩戴者口鼻的用具。口罩对进入肺部的空气具有一定的过滤作用,在呼吸道传染病流行,以及在粉尘等污染的环境中,具有非常重要的作用。
[0003]
通常地,口罩主要由口罩本体、耳带和鼻条构成,耳带的数量为两个,并通过熔融焊接工艺固定于口罩本体的左右两侧;鼻条固定于口罩本体内部。其中口罩本体采用多层无纺布并通过热压和折叠等工序成型,并可根据口罩本体大小的不同分为儿童和成人佩带的两种型号。
[0004]
口罩大都为单色,例如白色或蓝色,但根据需要会在口罩外层的无纺布上添加图案,来达到提升口罩美观度的目的。为了实现标准化设计,需要每个图案均处于口罩的相同位置,鉴于此,亟需提供一种实现图案定位的口罩成型机及成型方法。
技术实现要素:
[0005]
为了解决上述问题,本发明提供了一种口罩成型机及成型方法。
[0006]
一种口罩成型机,包括:
[0007]
一焊接切割装置,包括一横向焊接机构、一纵向焊接机构、一纵向切割机构、一第一动力机构、一第二动力机构和一第三动力机构,所述纵向焊接机构位于所述横向焊接机构和所述纵向切割机构之间,所述第一动力机构与所述横向焊接机构传动连接,所述第二动力机构与所述纵向焊接机构传动连接,所述第三动力机构与所述纵向切割机构传动连接;
[0008]
一色标识别装置,包括一色标传感器,用于识别口罩本体的色标以生成色标信号;
[0009]
一控制系统,用于接收所述色标传感器生成的色标信号,来控制所述第二动力机构和所述第三动力机构的转速,以对所述口罩本体的图案进行定位。
[0010]
可选择地,所述焊接切割装置还包括一牵引件,所述牵引件和所述第一动力机构传动连接,用于对所述口罩本体进行牵引;
[0011]
所述控制系统根据所述第一动力机构生成的脉冲信号和所述色标信号,来控制所述第二动力机构和所述第三动力机构的转速,或者所述控制系统根据所述第一动力机构对应编码器生成的转速信号和所述色标信号,来控制所述第二动力机构和所述第三动力机构的转速。
[0012]
可选择地,所述牵引件包括一第一牵引机构、一第二牵引机构和一第三牵引构,所述第一牵引机构位于所述横向焊接机构和所述纵向焊接机构之间,所述第二牵引机构位于所述纵向焊接机构和所述纵向切割机构之间,所述第三牵引机构位于所述纵向切割机构背离所述第二牵引机构的一侧。
[0013]
可选择地,所述色标识别装置还包括两夹板,两所述夹板相对设置,以使所述口罩本体的外层无纺布从两所述夹板之间通过,所述色标和图案均位于所述外层无纺布上,所述夹板上开设有与所述色标相对配合孔,以使所述色标传感器通过所述配合孔检测所述外层无纺布上的色标。
[0014]
可选择地,所述色标识别装置还包括一撑开件,所述撑开件位于所述夹板背离所述焊接切割装置的一侧,用于撑开口罩本体的内、中层无纺布,以防止所述内、中层无纺布阻挡所述色标传感器检测所述外层无纺布上的色标。
[0015]
可选择地,所述色标识别装置还包括一色标支架和一色标滑动件,所述色标传感器、所述夹板、所述撑开件均安装在所述色标支架上,所述色标支架的底部安装有色标滑动件。
[0016]
可选择地,还包括鼻条添加装置位于所述焊接切割装置和所述叠合装置之间,所述鼻条添加装置包括一鼻条传动轴和一鼻条切刀轴,所述鼻梁条传动轴和所述鼻条切刀轴分别与所述第二动力机构传动连接。
[0017]
可选择地,还包括鼻条添加装置位于所述焊接切割装置和所述叠合装置之间,所述鼻条添加装置包括一鼻条传动轴和一鼻条切刀轴,所述鼻梁条传动轴和所述鼻条切刀轴分别与第四动力机构传动连接。
[0018]
可选择地,还包括鼻条添加装置位于所述焊接切割装置和所述叠合装置之间,所述鼻条添加装置包括一鼻条传动轴和一鼻条切刀轴,所述鼻条切刀轴与第四动力机构传动连接,所述鼻梁条传动轴与第五动力机构传动连接。
[0019]
一种口罩成型方法,包括以下步骤:
[0020]
通过色标传感器检测口罩本体外层无纺布的色标,并生成色标信号,所述外层无纺布上具有图案;
[0021]
控制第一动力机构带动横向焊接机构对口罩本体进行横向焊接;
[0022]
根据所述色标信号,控制第二动力机构驱动纵向焊接机构,及控制第三动力机构驱动纵向切割机构,以进行对口罩本体的图案定位。
[0023]
可选择地,所述根据色标信号包括:
[0024]
依据所述色标信号和所述脉冲信号,所述脉冲信号为驱动牵引件运行电机的脉冲信号,所述牵引件用于对所述口罩本体进行牵引。
[0025]
可选择地,所述根据色标信号包括:
[0026]
依据所述色标信号和所述转速信号,所述转速信号为通过编码器获取驱动牵引件运行的电机转速,以生成转速信号,所述牵引件用于对所述口罩本体进行牵引。
[0027]
与现有技术相比,本技术方案具有以下优点:
[0028]
所述第一动力机构带动所述横向焊接机构、所述第一牵引机构、所述第二牵引机构和所述第三牵引构运行,同时多层无纺布叠合形成的口罩本体通过色标识别装置进行色标识别,以使所述色标识别装置获得色标信号,并将其发给控制系统,并且所述控制系统获取所述第一动力机构所在编码器生成转速信号,以使所述控制系统根据所述转速信号和所述色标信号等,或者脉冲信号和色标信号等来控制所述第二动力机构和所述第三动力机构的转速,以使所述口罩本体的图案进行定位。其中,所述第二动力机构驱动所述纵向焊接机构对口罩本体进行纵向焊接,所述第三动力机构驱动所述纵向切割机构对口罩本体进行纵
向切割,进而实现对口罩本体图案的定位。还可根据需要制定不同横向长度的口罩,包括成人型和儿童型口罩等,有效提升使用效率,有利于推广应用。
[0029]
以下结合附图及实施例进一步说明本发明。
附图说明
[0030]
图1是根据本发明所述口罩成型机的一个优选实施例的结构示意图;
[0031]
图2是根据本发明所述焊接切割装置的一个优选实施例的结构示意图;
[0032]
图3是根据本发明所述焊接切割装置的上述优选实施例的俯视图;
[0033]
图4是根据本发明所述焊接切割装置的上述优选实施例的剖视图;
[0034]
图5是根据本发明所述色标识别装置的一个优选实施例的结构示意图;
[0035]
图6是根据本发明所述色标识别装置的上述优选实施例的侧视图;
[0036]
图7是根据本发明所述色标识别装置的上述优选实施例的剖视图;
[0037]
图8是根据本发明所述口罩本体的一个优选实施例的结构示意图;
[0038]
图9是根据本发明所述焊接切割装置的第一实施例的结构框图;
[0039]
图10是根据本发明所述焊接切割装置的第二实施例的结构框图;
[0040]
图11是根据本发明所述焊接切割装置的第三实施例的结构框图;
[0041]
图12是根据本发明所述口罩成型方法的流程图。
具体实施方式
[0042]
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
[0043]
本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
[0044]
可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
[0045]
如图1至图9所示,所述口罩成型机,用于对口罩本体的图案进行定位,所述口罩本体上还添加有用于所述色标传感器210识别的色标a,所述口罩成型机包括:
[0046]
一焊接切割装置100,包括一横向焊接机构111、一纵向焊接机构112、一纵向切割机构113、第一动力机构131、第二动力机构132和第三动力机构133,所述纵向焊接机构112位于所述横向焊接机构111和所述纵向切割机构113之间,所述第一动力机构131与所述横向焊接机构111传动连接,所述第二动力机构132与所述纵向焊接机构112传动连接,所述第三动力机构133与所述纵向切割机构113传动连接;
[0047]
一色标识别装置200,包括色标传感器210,用于识别口罩本体的色标a以生成色标
信号;
[0048]
一控制系统,分别与所述色标传感器210、第二动力机构132和第三动力机构133电性连接,用于接收所述色标传感器210生成的色标信号,来控制所述第二动力机构132和所述第三动力机构133的转速,以使所述口罩本体的图案进行定位,来保证每个口罩的图案均处于同一位置。
[0049]
所述口罩本体可采用多层无纺布叠合形成,所述图案和色标a均位于所述口罩本体的外层无纺布a上,所述图案和所述色标a可采用印花等方式添加在外层无纺布a上。需要说明的是,每层无纺布均为连续的,叠合后依次通过所述横向焊接机构111、所述纵向焊接机构112、所述纵向切割机构113形成多个独立的口罩,可见外层无纺布a上印有多个所述图案和所述色标a,并通过所述纵向切割机构113分割成多个独立的口罩,以使每个口罩均具有所述图案。
[0050]
参考图8,所述色标a位于所述外层无纺布a上,且位于所述外层无纺布a纵向的一侧并靠边设置。所述口罩本体可包含三层无纺布,分别为外层、中层和内层无纺布,其中外层无纺布a的纵向长度长于其它两层无纺布的纵向长度,当三层无纺布叠合时,其它两层无纺布位于外层无纺布a的中间位置,以使所述色标a露出,以待所述色标传感器210能够识别。可见所述色标a和图案可不处于同一位置,通过对所述色标a的识别,来实现对所述图案的定位。
[0051]
前述的所述纵向焊接机构112是由所述第二动力机构132驱动的,所述纵向切割机构113是由所述第三动力机构133驱动的,可见所述横向焊接机构111、所述纵向焊接机构112和所述纵向切割机构113是独立控制的,因此可先通过所述色标传感器210识别所述外层无纺布a上的色标a,然后来独立控制所述横向焊接机构111和所述纵向焊接机构112,以完成所述图案的定位,以使每个口罩的图案均处于同一位置。
[0052]
如图2至图4、图9所述,多层无纺布叠合的口罩本体通过所述焊接切割装置100时,外层无纺布a位于最下面,其先通过所述横向焊接机构111进行横向焊接,然后通过所述纵向焊接机构112进行纵向焊接,最后通过所述纵向切割机构113对纵向焊接的焊接处进行切割,以形成多个独立的口罩。
[0053]
如图2、图4和图9所示,所述横向焊接机构111包括一横向焊接件1111和一横向支撑件1112,所述横向焊接件1111和所述横向支撑件1112相对设置,所述横向焊接件1111呈圆柱形,其上设置有两个横向焊接部11111,分别对应口罩本体的两个横向的焊接位置,参考图3和图8,所述横向焊接件1111与所述第一动力机构131传动连接,通过所述第一动力机构131带动转动,以使通过所述横向焊接件1111和所述横向支撑件1112之间的口罩本体进行横向焊接。
[0054]
参考图4,所述横向支撑件1112与所述横向焊接件1111相对的侧面为平面,用于支撑所述口罩本体,以使所述横向焊接件1111对其上的口罩本体进行横向焊接。
[0055]
参考图3,所述横向焊接部11111呈环形,且环绕于所述横向焊接件1111的周缘,并且所述横向焊接部11111的数量为两个,且分别对应口罩本体的两个横向的焊接位置。其中两个所述横向焊接部11111之间的距离由所述口罩本体上两个横向的焊接处之间的距离决定。
[0056]
由于所述横向焊接部11111呈环形,因此横向焊接机构111对多层无纺布叠合的口
罩本体进行连续的横向焊接。
[0057]
如图2、图4和图9所示,纵向焊接机构112包括一纵向焊接件1121和一纵向支撑件1122,所述纵向焊接件1121和所述纵向支撑件1122相对设置,所述纵向焊接件1121呈圆柱型,其上设置有一纵向焊接部11211,所述纵向焊接部11211与所述纵向焊接件1121的轴线平行设置,对应所述口罩本体的纵向焊接位置,参考图4。所述纵向焊接件1121与所述第二动力机构132传动连接,通过所述第二动力机构132带动转动,以使通过所述纵向焊接件1121和所述纵向支撑件1122之间的口罩本体进行纵向焊接。
[0058]
所述控制系统通过所述第二动力机构132控制所述纵向焊接件1121转速和时间,以确定所述图案和口罩本体纵向焊接件的相对位置,以对所述口罩本体的图案进行定位。
[0059]
参考图4,所述纵向支撑件1122与所述纵向焊接件1121相对的侧面为平面,用于支撑所述口罩本体,以使所述纵向焊接件1121对其上的口罩本体进行纵向焊接。
[0060]
如图2、图4和图9所示,所述纵向切割机构113包括一纵向切割件1131和一切割支撑件1132,所述纵向切割件1131和所述切割支撑件1132相对设置,所述纵向切割件1131和所述切割支撑件1132均呈圆柱型,且两者轴线相平行,所述纵向切割件1131上设置有一纵向切割部11311,所述纵向切割部11311与所述纵向切割件1131的轴线相平行,以对所述口罩本体的纵向焊接处进行切割,参考图4。所述纵向切割件1131与所述第三动力机构133传动连接,所述纵向切割件1131和所述切割支撑件1132可通过齿轮啮合,所述第三动力机构133带动所述纵向切割件1131转动,所述纵向切割件1131带动所述切割支撑件1132反向转动,以对口罩本体的纵向焊接处进行切割。
[0061]
所述控制系统通过所述第三动力机构133控制所述纵向切割件1131的转速和时间,以确定所述纵向切割件1131对口罩本体纵向焊接处进行切割。
[0062]
如图3和图4所示,所述横向焊接件1111、所述纵向焊接件1121、所述纵向切割件1131和所述切割支撑件1132的轴线相平行。
[0063]
如图2至图4和图9所示,所述焊接切割装置100还包括牵引件,用于对所述口罩本体进行牵引移动,以便所述横向焊接件1111对口罩本体进行横向焊接,所述纵向焊接件1121对口罩本体进行纵向焊接,以及所述纵向切割件1131对口罩本体进行纵向切割。
[0064]
所述牵引件包括一第一牵引机构121、一第二牵引机构122和一第三牵引构123,所述第一牵引机构121位于所述横向焊接机构111和所述纵向焊接机构112之间,用于将多层无纺布叠合的口罩本体通过所述横向焊接机构111。所述第二牵引机构122位于所述纵向焊接机构112和所述纵向切割机构113之间,用于将经过所述横向焊接机构111进行横向焊接的口罩本体通过所述纵向焊接机构112。所述第三牵引机构123位于所述纵向切割机构113背离所述第二牵引机构122的一侧,用于将经过所述纵向焊接机构112进行纵向焊接的口罩本体通过所述纵向切割机构113。
[0065]
在一个实施例中,参考图9和图10,所述第一动力机构131分别与所述第一牵引机构121、所述第二牵引机构122、所述第三牵引构123和所述横向焊接机构111传动连接。即所述第一牵引机构121、所述第二牵引机构122、所述第三牵引构123和所述横向焊接机构111同时由所述第一动力机构131驱动运行。具体地,所述第一动力机构131通过齿轮或皮带轮分别与所述第一牵引机构121、所述第二牵引机构122、所述第三牵引构123和所述横向焊接机构111传动连接。
[0066]
所述第一动力机构131、所述第二动力机构132和所述第三动力机构133均为电机。其中,所述第一动力机构131、所述第二动力机构132和所述第三动力机构133均为伺服或步进电机,可加装或不加装减速机。并且驱动所述第一牵引机构121运行的所述第一动力机构131生成脉冲信号,以使所述控制系统根据所述脉冲信号和所述色标信号等,来控制所述第二动力机构132和所述第三动力机构133的转速,对所述口罩本体的图案进行定位。当然,所述第一动力机构131可为普通电机,并加装减速机和对应设置有编码器,通过所述编码器获取所述第一动力机构131的转速以生成转速信号,以使所述控制系统根据所述转速信号和所述色标信号等,来控制所述第二动力机构132和所述第三动力机构133的转速,以使所述口罩本体的图案进行定位。需要说明的,所述第一动力机构131还同时控制第一牵引机构121、第二牵引机构122和第三牵引构123,通过分析所述编码器生成的转速信号,可确定口罩本体合适到达所述纵向焊接件1121和所述纵向切割件1131处,进而控制所述第二动力机构132来驱动纵向焊接机构112,以及控制所述第三动力机构133来驱动所述纵向切割件1131,进而达到对口罩本体图案的定位作业。如图4和9所示,所述第一牵引机构121包括一第一牵引主动轮1211和一第一牵引从动轮1212,所述第一牵引主动轮1211和所述第一牵引从动轮1212相对设置,所述第一牵引主动轮1211和所述第一牵引从动轮1212均呈圆柱型,且平行设置,以使所述口罩本体从所述第一牵引主动轮1211和所述第一牵引从动轮1212之间通过,以完成对所述口罩本体的牵引。其中,所述第一牵引主动轮1211与所述第一动力机构131传动连接,所述第一动力机构131和所述第一牵引从动轮1212通过齿轮啮合,即所述第一动力机构131带动所述第一牵引主动轮1211转动,所述第一牵引主动轮1211带动所述第一动力机构131反向转动,以对所述口罩本体进行牵引。
[0067]
如图4和图9所示,所述第二牵引机构122包括一第二牵引主动轮1221和一第二牵引从动轮1222,所述第二牵引主动轮1221和所述第二牵引从动轮1222相对设置,所述第二牵引主动轮1221和所述第二牵引从动轮1222均呈圆柱型,且平行设置,以使所述口罩本体从所述第二牵引主动轮1221和所述第二牵引从动轮1222之间通过,以完成对所述口罩本体的牵引。其中,所述第二牵引主动轮1221与所述第一动力机构131传动连接,所述第二牵引主动轮1221和所述第二牵引从动轮1222通过齿轮啮合,即所述第一动力机构131带动所述第二牵引主动轮1221转动,所述第二牵引主动轮1221带动所述第二牵引从动轮1222反向转动,以对所述口罩本体进行牵引。
[0068]
如图4和图9所示,所述第三牵引构123包括一第三牵引主动轮1231和一第三牵引从动轮1232,所述第三牵引主动轮1231和所述第三牵引从动轮1232相对设置,所述第三牵引主动轮1231和所述第三牵引从动轮1232均呈圆柱型,且平行设置,以使所述口罩本体从所述第三牵引主动轮1231和所述第三牵引从动轮1232之间通过,以完成对所述口罩本体的牵引。其中,第三牵引主动轮1231与所述第一动力机构131传动连接,所述第三牵引主动轮1231和所述第三牵引从动轮1232通过齿轮啮合,即所述第一动力机构131带动第三牵引主动轮1231转动,所述第三牵引主动轮1231带动所述第三牵引从动轮1232反向转动,以对所述口罩本体进行牵引。
[0069]
所述第一牵引主动轮1211、所述第一牵引从动轮1212、所述第二牵引主动轮1221、所述第二牵引从动轮1222、所述第三牵引主动轮1231和所述第三牵引从动轮1232相互平行。继续参考图4,所述横向焊接件1111位于所述横向支撑件1112上部,所述纵向焊接件
1121位于所述纵向支撑件1122上部,所述纵向切割件1131位于所述切割支撑件1132上部。当然所述纵向切割件1131也可以位于所述切割支撑件1132下部。
[0070]
所述第一牵引主动轮1211位于所述第一牵引从动轮1212下部,所述第二牵引主动轮1221位于所述第二牵引从动轮1222下部,所述第三牵引主动轮1231位于所述第三牵引从动轮1232下部。当然所述第一牵引主动轮1211也可以位于所述第一牵引从动轮1212上部,所述第二牵引主动轮1221位于所述第二牵引从动轮1222上部,所述第三牵引主动轮1231位于所述第三牵引从动轮1232上部。
[0071]
如图2和图4所示,所述焊接切割装置100还包括两支板140,两所述支板140相对设置,分别连接所述横向焊接机构111、所述纵向焊接机构112、所述纵向切割机构113、所述第一牵引机构121、所述第二牵引机构122和所述第三牵引构123。
[0072]
以所述横向焊接机构111为例,所述横向焊接件1111的两端分别连接所述支板140,所述横向支撑件1112固定于所述横向焊接件1111下部,以使所述横向焊接件1111和所述横向支撑件1112相对设置。
[0073]
以所述第一牵引机构121为例,所述第一牵引主动轮1211的两端分别连接所述支板140,所述第一牵引从动轮1212的两端分别连接所述支板140,以使所述第一牵引主动轮1211和所述第一牵引从动轮1212相对设置。
[0074]
具体地,所述支板140上开设有多个支板限位槽141,所述横向焊接机构111、所述纵向焊接机构112、所述纵向切割机构113、所述第一牵引机构121、所述第二牵引机构122和所述第三牵引构123的端部可安装于所述支板限位槽141内。其中所述横向焊接机构111、所述纵向焊接机构112和所述纵向切割机构113等分别对应不同的所述支板限位槽141.
[0075]
以所述第一牵引机构121为例,第一牵引从动轮1212的端部安装于所述支板限位槽141内,通过紧固件穿过所述支板140抵接于所述第一牵引从动轮1212上,可调节所述第一牵引主动轮1211和所述第一牵引从动轮1212之间的位置关系,进而实现微调。
[0076]
以所述横向焊接机构111为例,所述横向焊接件1111的端部安装于所述支板限位槽141内,并且所述横向焊接件1111的端部下设置有弹簧150,通过紧固件穿过所述支板140抵接于横向焊接件1111,可带动所述横向焊接件1111克服弹簧150弹力移动,进而调节所述横向焊接件1111和所述横向支撑件1112之间的位置。
[0077]
以所述纵向焊接机构112为例,所述纵向焊接件1121的端部安装于所述支板限位槽141内,并且所述纵向焊接件1121的端部下设置有弹簧150,通过紧固件穿过所述支板140抵接于所述纵向焊接件1121,可带动所述纵向焊接件1121克服弹簧150弹力移动,进而调节所述纵向焊接件1121和所述纵向支撑件1122之间的位置。
[0078]
如图1所示,所述色标识别装置200位于所述焊接切割装置100的一侧,具体地位于所述横向焊接机构111背离所述第一牵引机构121的一侧,即口罩本体首先通过所述色标识别装置200进行识别,然后通过所述焊接切割装置100进行焊接切割。
[0079]
如图5至图8所示,所述色标识别装置200包括一色标传感器210和两夹板220,两所述夹板220相对设置,以使所述外层无纺布a从两所述夹板220之间通过,所述夹板220上开设有一配合孔221,所述色标传感器210与所述配合孔221相对设置,以使外层无纺布a从两夹板220之间通过后,所述色标传感器210通过所述配合孔221检测所述外层无纺布a上的色标a。
[0080]
具体地,所述色标传感器210位于所述夹板220的下部,当然所述色标传感器210也可位于所述夹板220的上部。
[0081]
如图5至图7所示,所述色标识别装置200还包括一撑开件230,所述撑开件230位于所述夹板220背离所述焊接切割装置100的一侧,用于撑开口罩本体的其它无纺布,包括中层和内层无纺布,防止其它无纺布遮挡色标识别传感器210识别外层无纺布上的图标。当口罩本体通过量夹板220时,外层无纺布从两所述夹板220之间通过,其它无纺布受撑开件230影响,以上层的夹板220位基准翘起,进而防止其它无纺布影响所述色标传感器210的检测。
[0082]
在一个示例中,所述撑开件230呈z型。
[0083]
如图5至图7所示,所述色标识别装置200还包括一光源240,所述光源240固定于所述夹板220背离所述色标传感器210,即两个所述夹板220位于所述光源240和所述色标传感器210之间,并且光源240与所述夹板220上的配合孔221相对设置,以使光源240通过所述配合孔221照射在所述外层无纺布上,便于所述色标传感器210检测外层无纺布上的色标。可见所述撑开件230撑开了口罩本体的其它无纺布,防止其它无纺布遮挡光源240。
[0084]
在一个示例中,所述光源240可为led。
[0085]
如图5至图7所示,所述色标识别装置200还包括一罩壳250,所述罩壳250位于所述夹板220的上部,所述光源240安装于所述罩壳250,通过设置所述罩壳250,提升所述光源240的照明效果。
[0086]
如图5至图7所示,所述色标识别装置200还包括一色标支架260,所述色标传感器210、所述夹板220、所述撑开件230均安装在所述色标支架260上。所述色标支架260的底部安装有色标滑动件270,以使所述色标支架260沿着所述色标滑动件270的轴线方向移动,其中,所述色标滑动件270的轴线与所述第一牵引主动轮1211、所述第一牵引从动轮1212、所述第二牵引主动轮1221等轴线相平行,以使所述夹板220上的配合孔221能够与所述外层无纺布上的色标对应调整。
[0087]
如图1所示,所述口罩成型机还包括一折痕成型装置300、一叠合装置400、一鼻条添加装置500,所述叠合装置400位于所述焊接切割装置100和所述色标识别装置200之间,所述折痕成型装置300位于所述色标识别装置200背离所述叠合装置400的一侧,所述鼻条添加装置500位于所述焊接切割装置100和所述叠合装置400之间,并靠近所述焊接切割装置100,其中所述折痕成型装置300用于对口罩本体进行折痕成型,所述叠合装置400对通过色标识别装置200进行色标检测而分离的多层无纺布进行叠合,以待后续焊接切割装置100进行整体焊接切割。
[0088]
在一个实施例中,如图10所示,所述鼻条添加装置500包括一鼻条传动轴510和一鼻条切刀轴520,所述鼻梁条传动轴510用于对鼻条进行传输,所述鼻条切刀轴520用于对所述鼻条进行切割,以符合每个口罩的长度。所述鼻梁条传动轴510和所述鼻条切刀轴520分别与所述第四动力机构134传动连接,由所述第四动力机构134带动所述鼻梁条传动轴510和所述鼻条切刀轴520运行。
[0089]
在另一个实施例中,如图9所示,所述鼻条添加装置500包括一鼻条传动轴510和一鼻条切刀轴520,所述鼻条切刀轴520与所述第四动力机构134传动连接,所述鼻梁条传动轴510与所述第五动力机构135传动连接。
[0090]
在另一个实施例中,如图11所示,所述鼻条添加装置500包括一鼻条传动轴510和
一鼻条切刀轴520,所述第二动力机构132分别与所述鼻梁条传动轴510和所述鼻条切刀轴520传动连接。综上所述,所述第一动力机构131带动所述横向焊接机构111、所述第一牵引机构121、所述第二牵引机构122和所述第三牵引构123运行,同时多层无纺布叠合形成的口罩本体通过色标识别装置200进行色标识别,以使所述色标识别装置200获得色标信号,并将其发给控制系统,并且所述控制系统获取所述第一动力机构131所在编码器生成转速信号,以使所述控制系统根据所述转速信号和所述色标信号等,或者脉冲信号和色标信号等来控制所述第二动力机构132和所述第三动力机构133的转速,以使所述口罩本体的图案进行定位。其中,所述第二动力机构132驱动所述纵向焊接机构112对口罩本体进行纵向焊接,所述第三动力机构133驱动所述纵向切割机构113对口罩本体进行纵向切割,进而实现对口罩本体图案的定位。
[0091]
需要说明是,由于采用上述结构,因此可根据需要制定不同横向长度的口罩,包括成人型和儿童型口罩等,有效提升使用效率,有利于推广应用。
[0092]
如图12所示,所述口罩成型方法,包括以下步骤:
[0093]
s100,通过色标传感器检测口罩本体外层无纺布的色标,并生成色标信号,所述外层无纺布上具有图案;
[0094]
s200,控制第一动力机构带动横向焊接机构对口罩本体进行横向焊接;
[0095]
s300,根据所述色标信号,控制第二动力机构驱动纵向焊接机构,及控制第三动力机构驱动纵向切割机构,以进行对口罩本体的图案定位。
[0096]
在步骤s100中,所述色标和图案均添加在所述口罩本体的外层无纺布上,并且两者可处在不同位置,其中色标传感器对应检测外层无纺布上的色标,以生成色标信号。
[0097]
在步骤s200,所述横向焊接机构连续的对所述口罩本体进行横向焊接。
[0098]
在一个实施例中,所述根据所述色标信号包括:
[0099]
依据所述色标信号和所述转速信号。
[0100]
其中,所述转速信号,是通过编码器获取驱动牵引件运行的电机转速,以生成转速信号。具体地,所述牵引件包括第一牵引机构、第二牵引机构和第三牵引构,并且所述牵引件是由第一动力机构带动的,因此所述编码器获取第一动力机构的转速生成转速信号。
[0101]
在另一个实施例中,所述根据所述色标信号包括:
[0102]
依据所述脉冲信号和所述色标信号。
[0103]
其中,所述脉冲信号,是获得驱动牵引件运动的电机脉冲信号。具体地,所述牵引件包括第一牵引机构、第二牵引机构和一第三牵引构,当所述牵引件是由第一动力机构带动时,获取所述第一动力机构的脉冲信号。
[0104]
前述的牵引机用于对所述口罩本体进行牵引。
[0105]
根据所述色标信号和所述转速信号等,或者所述脉冲信号和所述色标信号确定何时驱动所述纵向焊接机构和所述纵向切割机构运行的时间,当到达相应时间后,控制第二动力机构驱动所述纵向焊接机构对口罩本体进行纵向焊接,控制第三动力机构驱动纵向切割机构对口罩本体进行纵向切割,该纵向切割位置为纵向焊接的位置。
[0106]
除此以外,只要在本发明上述揭露的基础上,采用了与本发明相同或近似的技术方案,解决了与本发明相同或近似的技术问题,并且达到了与本发明相同或近似的技术效果,都属于本发明的保护范围之内,本发明的具体实施方式并不以此为限。
[0107]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0108]
本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips