
 商标分类
商标分类  商标转让
商标转让 
一种U型绳子拉手的自动固定及切割设备的制作方法
 2021-02-22 02:02:31|
2021-02-22 02:02:31| 339|
339| 起点商标网
起点商标网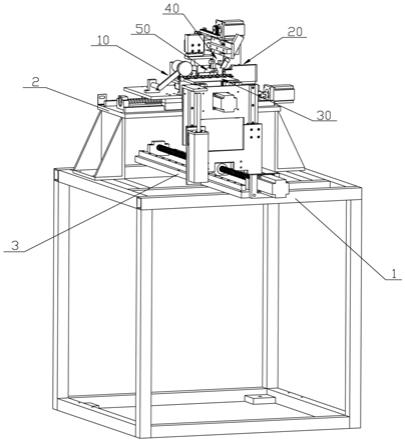
一种u型绳子拉手的自动固定及切割设备
技术领域
[0001]
本实用新型涉及一种绳子拉手的加工设备,更为具体地说是指一种u型绳子拉手的自动固定及切割设备。
背景技术:
[0002]
申请公布号为cn109531921a的中国发明专利公开了一种绳子拉手全自动摆绳切割一体机,包括:基座;绳子固定装置,所述绳子固定装置用于在加工过程中对绳子进行固定;拉绳装置,所述拉绳装置用于与所述绳子固定装置配合将所述绳子对折成u形,并将所述绳子对折之后的弯曲部拉伸至预定位置;剪裁热粘合装置,所述剪裁热粘合装置用于将所述绳子按照预定长度切断,并将切好的所述绳子的两端热熔粘合在一起;x轴丝杆模组,所述x轴丝杆模组用于驱动所述拉绳装置、绳子固定装置、剪裁热粘合装置沿x轴运动;z轴丝杆模组,所述z轴丝杆模组用于驱动所述拉绳装置、绳子固定装置、剪裁热粘合装置以及x轴丝杆模组沿z轴运动;输送装置,所述输送装置设置于所述基座的底部,所述输送装置用于将切好的绳子运送至注塑模具。
[0003]
该全自动摆绳切割一体机工作时,先通过拉绳装置与绳子固定装置配合将绳子对折成u形,并将绳子对折之后的弯曲部拉伸至预定位置;然后绳子固定装置的压舌块往固定压绳块方向移动使绳子部分重叠并夹在压舌块与固定压绳块之间;再由z轴丝杆模组动作将绳子重叠的一部分卡在夹绳板的缺口,并通过压绳块压入夹在卡槽内;最后通过剪裁热粘合装置将绳子按照预定长度切断,并将切好的绳子的两端热熔粘合在一起。
[0004]
以上全自动摆绳切割一体机仅可用于两个自由端粘合一起的绳子拉手的摆放切割,而对于两个自由端不粘合的u型绳子拉手则无法适用,只能采用人工手工摆放,生产效率极其低下。为此,我们提供一种u型绳子拉手的自动摆放切割设备。
技术实现要素:
[0005]
本实用新型提供一种u型绳子拉手的自动固定及切割设备,以解决u型绳子拉手无法采用现有绳子拉手全自动摆绳切割一体机进行生产,只能由人工摆放,生产效率极其低下等缺点。
[0006]
本实用新型采用如下技术方案:
[0007]
一种u型绳子拉手的自动固定及切割设备,包括:基座、绳子送料装置、绳子自由端固定装置、绳子夹持输送装置、绳子成型固定装置以及绳子热切装置,所述绳子送料装置与所述绳子自由端固定装置沿x轴间隔设置,所述绳子自由端固定装置对应配设有一个驱动其沿x轴向所述绳子送料装置一侧移动靠近的x轴移动机构;所述绳子夹持输送装置与所述绳子成型固定装置设于所述绳子送料装置与所述绳子自由端固定装置间隔处y轴方向的两侧,所述绳子夹持输送装置包括夹绳板、驱动所述夹绳板沿y轴移动的y轴驱动机构以及驱动所述夹绳板沿z轴移动的z轴移动机构,所述夹绳板的顶面沿x轴方向间隔开设有若干组夹绳槽,每组夹绳槽包括两个等间距设置的卡槽,每组夹绳槽的两个卡槽之间设有连接通
道;所述绳子成型固定装置包括一个拉动绳子沿所述绳子夹持输送装置一侧移动对折形成u型并卡设在所述夹绳槽上的夹具机构以及一个防止u型绳子上移脱出所述夹绳槽的压块机构,所述夹具机构包括一手指气缸、一对夹具以及一夹具升降气缸,所述手指气缸通过一连接板与所述夹具升降气缸连接,所述夹具对应设于所述手指气缸的夹臂上,所述夹具沿x轴方向上的宽度与所述夹绳槽x轴方向的宽度相适配,所述夹具机构设有一驱动其沿y轴方向移动的y轴移动机构;所述基座上还设有一个驱动所述绳子送料装置、绳子自由端固定装置、绳子成型固定装置以及绳子热切装置沿着x轴方向移动的x轴驱动机构。
[0008]
具体地,所述绳子送料装置靠近所述绳子自由端固定装置的一端设有一个送绳板,所述送绳板旁侧还设有过渡导向板一,所述过渡导向板一的径向侧面设有y轴导向槽一;所述绳子自由端固定装置与所述绳子送料装置相对的一侧设有过渡导向板二,该过渡导向板二的径向侧面对应设有y轴导向槽二。
[0009]
优选地,所述绳子热切装置包括封头、发热元件、切刀以及驱动所述封头沿y轴移动的封头驱动机构,所述发热元件设于所述封头内,所述封头的前端设有一个与所述过渡导向板一侧壁相对的热风出口,所述切刀设于所述封头前端,且位于热风出口远离所述y轴导向槽一一端的侧面。
[0010]
进一步地,所述y轴导向槽一的侧面还设有一个挡风机构,该档风机构包括档杆及驱动档杆沿z轴移动的档杆升降气缸,所述档杆为l型,该档杆的上部设于所述y轴导向槽一的侧面,档杆的底部与所述档杆升降气缸的活塞杆连接。
[0011]
进一步地,所述绳子送料装置设有一个计米轮,该计米轮上对应连接一个编码器。
[0012]
进一步地,所述基座的上方固定架设有一个支撑板,所述x轴驱动机构包括第一丝杆电机、第一丝杆、第一丝杆螺母、第一承载板、第一导块以及第一导轨,所述第一丝杆固定连接于所述第一丝杆电机的输出轴,所述第一丝杆螺母连接于所述第一丝杆上,所述第一承载板底面与所述第一丝杆螺母固定连接,所述支撑板上设有若干所述第一导轨,所述第一承载板通过若干所述第一导块设于所述第一导轨上。
[0013]
进一步地,所述x轴移动机构包括第一电机、第一齿轮、第一齿条、第一连接板、第一滑块以及第一滑轨,所述绳子自由端固定装置固定于所述第一连接板上,所述第一连接板通过第一滑块设于所述第一滑轨,该第一连接板上固定设有第一齿条,所述第一齿轮连接于所述第一电机的输出轴,该第一齿轮与所述第一齿条啮合连接。
[0014]
进一步地,所述y轴移动机构包括第二电机、第二齿轮、第二齿条、第二连接板、第二滑块以及第二滑轨,所述第二滑轨固定设于所述第一承载板上方,该第二滑轨的侧面设有所述第二滑块,所述夹具升降气缸通过所述第二连接板与所述第二滑块连接,所述第二连接板固定设有所述第二齿条,所述第二齿轮连接于所述第二电机的输出轴,该第二齿轮与所述第二齿条啮合连接。
[0015]
进一步地,所述y轴驱动机构包括第二丝杆电机、第二丝杆、第二丝杆螺母、第二导轨及导向座,所述基座上设有一y轴支撑板,该y轴支撑板上设有所述第二导轨,所述第二丝杆固定连接于所述第二丝杆电机的输出轴,所述第二丝杆螺母连接于所述第二丝杆上,所述导向座固定连接于所述第二丝杆螺母上,其底部对应设于所述第二导轨上,所述夹绳板通过所述z轴移动机构固定于所述导向座的侧壁上。
[0016]
进一步地,所述z轴移动机构包括z轴气缸、气缸固定座、第三连接板、第三滑块及
第三滑轨,所述夹绳板通过一个l型承接板安装于所述第三连接板上,所述第三连接板的侧壁上设有所述第三滑轨,所述气缸固定座固定于所述导向座的侧壁上,所述z轴气缸固定于所述气缸固定座的其中一个侧面上,该z轴气缸的活塞杆通过一个连接块与所述第三连接板连接,所述气缸固定座的另一侧面上固定有若干个所述第三滑块,所述第三滑块滑动设于所述第三滑轨。
[0017]
由上述对本实用新型结构的描述可知,和现有技术相比,本实用新型具有如下优点:
[0018]
1、该实用新型的u型绳子拉手自动固定及切割设备,通过绳子成型固定装置与绳子夹持输送装置之间相互配合,可使绳子成型为u型且其两端卡入夹绳槽,夹具机构的夹具宽度与夹绳槽宽度相适配,保证u型绳子的两端可准确挂入夹绳槽的两个卡槽内,且夹具机构在绳子两端挂入卡槽内继续拉动绳子移动时,压块机构压在连接通道上的绳子两端上,可防止绳子脱离卡槽而导致绳子固定不紧而影响后续的注塑工序。故该实用新型可适用于u型绳子拉手的自动固定及切割,大大提高了该类型绳子拉手的摆放固定效率。
[0019]
2、该实用新型的u型绳子拉手自动固定及切割设备,在y轴导向槽一的侧面还设有一个挡风机构,可使封头热风出口的出风偏向另一侧,保证待切割绳子一端的加热温度,提高了绳子的热切效果,还可防止热量浪费。
附图说明
[0020]
图1为本实用新型的结构示意图。
[0021]
图2为本实用新型省略绳子夹持输送装置的结构示意图。
[0022]
图3为图2中a的放大示意图。
[0023]
图4为本实用新型省略绳子夹持输送装置及绳子成型固定装置的结构示意图。
[0024]
图5为本实用新型绳子成型固定装置的结构示意图。
[0025]
图6为本实用新型绳子夹持输送装置的结构示意图一。
[0026]
图7为本实用新型绳子夹持输送装置的结构示意图二。
具体实施方式
[0027]
下面参照附图说明本实用新型的具体实施方式。为了全面理解本实用新型,下面描述到许多细节,但对于本领域技术人员来说,无需这些细节也可实现本实用新型。对于公知的组件、方法及过程,以下不再详细描述。
[0028]
一种u型绳子拉手的自动固定及切割设备,参照图1,包括:基座1、绳子送料装置10、绳子自由端固定装置20、绳子夹持输送装置30、绳子成型固定装置40以及绳子热切装置50。基座1的上方固定架设有一个支撑板2,绳子送料装置10、绳子自由端固定装置20、绳子成型固定装置40以及绳子热切装置50通过x轴驱动机构可滑动地设于支撑板2上。参照图2,x轴驱动机构包括第一丝杆电机11、第一丝杆12、第一丝杆螺母(角度原因,图中未示出)、第一承载板14、第一导块15以及第一导轨16,所述第一丝杆12固定连接于所述第一丝杆电机11的输出轴,第一丝杆螺母连接于所述第一丝杆12上,所述第一承载板14底面与所述第一丝杆螺母固定连接,支撑板2上设有若干所述第一导轨16,所述第一承载板14通过若干所述第一导块15设于所述第一导轨16上。
[0029]
参照图2,上述绳子送料装置10与绳子自由端固定装置20沿x轴间隔设置在支撑板2上,绳子送料装置10及绳子自由端固定装置20均为本领域常见的结构,本实施例中不做详细赘述。绳子送料装置10设有一个计米轮101,该计米轮101上对应连接一个编码器102,可精确对绳子的送线长度进行计量。
[0030]
参照图2至图4,绳子送料装置10靠近所述绳子自由端固定装置20的一端设有一个送绳板103,所述送绳板103旁侧还设有过渡导向板一104,所述过渡导向板一104的径向侧面设有y轴导向槽一105;所述绳子自由端固定装置20与所述绳子送料装置10相对的一侧设有过渡导向板二201,该过渡导向板二201的径向侧面对应设有y轴导向槽二202。y轴导向槽一105及y轴导向槽二202可在绳子成型固定装置40沿y轴方向拉绳成型时对y轴方向两端的绳子进行导向,使其精确地卡入绳子夹持输送装置30中。
[0031]
参照图2和图4,绳子自由端固定装置20对应配设有一个驱动其沿x轴向所述绳子送料装置一侧移动靠近的x轴移动机构,x轴移动机构包括第一电机21、第一齿轮22、第一齿条23、第一连接板24、第一滑块25以及第一滑轨26,第一滑轨26固定于上述第一承载板14上,所述绳子自由端固定装置固定于所述第一连接板24上,所述第一连接板24通过第一滑块25设于所述第一滑轨26,该第一连接板24上固定设有第一齿条23,所述第一齿轮22连接于所述第一电机21的输出轴,该第一齿轮22与所述第一齿条23啮合连接。
[0032]
参照图1、图6和图7,上述绳子夹持输送装置30与绳子成型固定装置40设于绳子送料装置10与绳子自由端固定装置20间隔处y轴方向的两侧。其中,绳子夹持输送装置30包括夹绳板31、驱动夹绳板31沿y轴移动的y轴驱动机构以及驱动夹绳板31沿z轴移动的z轴移动机构,夹绳板31的顶面沿x轴方向间隔开设有若干组夹绳槽311,每组夹绳槽311包括两个等间距设置的卡槽3110,每组夹绳槽311的两个卡槽3110之间设有连接通道3111。
[0033]
参照图6和图7,上述y轴驱动机构包括第二丝杆电机321、第二丝杆322、第二丝杆螺母323、第二导轨324及导向座325,所述基座1上设有一y轴支撑板3,该y轴支撑板3上设有所述第二导轨324,所述第二丝杆322固定连接于所述第二丝杆电机321的输出轴,所述第二丝杆螺母323连接于所述第二丝杆322上,所述导向座325固定连接于所述第二丝杆螺母323上,导向座325的底部对应设于所述第二导轨324上,所述夹绳板31通过所述z轴移动机构固定于所述导向座325的侧壁上。
[0034]
参照图6和图7, 上述z轴移动机构包括z轴气缸331、气缸固定座332、第三连接板333、第三滑块334及第三滑轨335,所述夹绳板31通过一个l型承接板34安装于所述第三连接板333上,所述第三连接板333的侧壁上设有所述第三滑轨335,所述气缸固定座332固定于所述导向座325的侧壁上,所述z轴气缸331固定于所述气缸固定座332的其中一个侧面上,z轴气缸331的活塞杆通过一个连接块与第三连接板333连接。所述气缸固定座332的另一侧面上固定有若干个所述第三滑块334,所述第三滑块334滑动设于所述第三滑轨335。
[0035]
参照图1和图5,绳子成型固定装置40包括一个拉动绳子沿所述绳子夹持输送装置30一侧移动对折形成u型并卡设在所述夹绳槽311上的夹具机构以及一个防止u型绳子上移脱出所述夹绳槽311的压块机构,所述夹具机构包括一手指气缸411、一对夹具412以及一夹具升降气缸413,所述手指气缸411通过一连接板与所述夹具升降气缸413连接,所述夹具412对应设于所述手指气缸411的夹臂上,所述夹具411沿x轴方向上的宽度与所述夹绳槽311的x轴方向宽度相适配,夹具机构还设有一驱动其沿y轴方向移动的y轴移动机构。
[0036]
参照图5,y轴移动机构包括第二电机421、第二齿轮422、第二齿条423、第二连接板424、第二滑块425以及第二滑轨426,所述第二滑轨426固定设于所述第一承载板14上方,该第二滑轨426的侧面设有所述第二滑块425,所述夹具升降气缸413通过所述第二连接板424与所述第二滑块425连接,所述第二连接板424固定设有所述第二齿条423,所述第二齿轮422连接于所述第二电机421的输出轴,该第二齿轮422与所述第二齿条423啮合连接。
[0037]
参照图5,压块机构包括一个倾斜设置的压块431及驱动压块431倾斜向下移动的压块气缸432,压块431在压块气缸432作用下,向下移动压在连接通道3111内的绳子两个自由端上,绳子两端刚挂入卡槽311内时,压块轻压在绳子上,绳子在夹具机构拉动下仍可继续沿y轴移动,直到达到预定长度。
[0038]
参照图2至图4,绳子热切装置50设于过渡导向板一104的侧面,包括封头51、发热元件、切刀52以及驱动所述封头51沿y轴移动的封头驱动机构53,所述发热元件设于所述封头51内,所述封头51的前端设有一个与过渡导向板一104侧壁相对的热风出口,所述切刀52设于所述封头51前端,且位于热风出口远离所述y轴导向槽一105一端的侧面。
[0039]
参照图2和图3,所述y轴导向槽一105的侧面还设有一个挡风机构,该档风机构包括档杆61及驱动档杆61沿z轴移动的档杆升降气缸62,所述档杆61为l型,该档杆61的上部设于所述y轴导向槽一105的侧面,档杆61的底部与所述档杆升降气缸62的活塞杆连接。该挡风机构可使封头热风出口的出风偏向另一侧,保证待切割绳子一端的加热温度,提高了绳子的热切效果,还可防止热量浪费。
[0040]
本实用新型的u型绳子拉手自动固定及切割设备,其工作流程如下:
[0041]
1、位于绳子送料装置10与绳子自由端固定装置20间隔处侧面的绳子夹持输送装置30沿z轴向下移动,使夹绳板顶端位于绳子水平面的下方;
[0042]
2、绳子自由端固定装置在x轴移动机构作用下向绳子送料装置一端移动,将绳子固定夹紧后返回;
[0043]
3、绳子成型固定装置40沿y轴移动使夹具机构位于绳子正上方,夹具机构在夹具升降气缸413作用下向下移动至绳子之间,再由y轴移动机构作用使夹具勾住绳子向绳子夹持输送装置30一侧移动形成u型;
[0044]
4、绳子夹持输送装置30的夹绳板沿z轴向上移动,使u型绳子的两个自由端卡入夹绳板的夹绳槽内;
[0045]
5、压块机构的压块向下移动压在连接通道内的两个绳子自由端上(非紧压状态);
[0046]
6、夹具机构在y轴移动机构作用下继续拉动绳子沿y轴移动,直至达到预定的长度,手指气缸动作使两个夹具夹紧绳子;
[0047]
7、挡风机构沿y轴上移,挡在y轴导向槽一105的侧面,热切机构开启对过渡导向板侧面上的绳子进行热风加热,再由切刀将其切断。
[0048]
8、热切机构、挡风机构、压块机构以及夹具机构分别回位,且x轴驱动机构动作,使绳子送料装置10、绳子自由端固定装置20、绳子成型固定装置40以及绳子热切装置50沿x轴移动一个夹绳槽宽度的距离,进行下一u型绳子的固定与切割。
[0049]
9、重复步骤1-8。
[0050]
上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips