
 商标分类
商标分类  商标转让
商标转让 
一种贴膜铆合自动化设备的制作方法
 2021-02-21 16:02:18|
2021-02-21 16:02:18| 370|
370| 起点商标网
起点商标网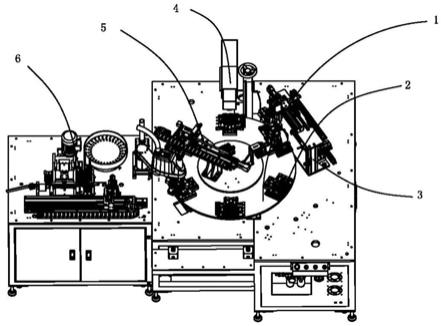
[0001]
本发明涉及麦拉膜自动化贴合技术领域,具体涉及一种贴膜铆合自动化设 备。
背景技术:
[0002]
麦拉有金属和非金属两种。金属迈拉片常用的有铜箔麦拉和铝箔麦拉,主 要作用是导电;非金属麦拉多是绝缘作用,常见材料有pc和pet,用于薄膜 开关或者电子电气产品的表面保护,或局部绝缘。
[0003]
麦拉的贴合目前主要采用人工的形式,严重占据生产力资源,增加企业生 产成本。
技术实现要素:
[0004]
为了克服现有技术中存在的缺点和不足,本发明的目的在于提供一种贴膜 铆合自动化设备。
[0005]
本发明的目的通过下述技术方案实现:
[0006]
一种贴膜铆合自动化设备,包括麦拉贴合去废装置和自动叠料翻转铆合装 置;
[0007]
所述麦拉贴合去废装置包括工作平台、设置于工作平台上的固定座、麦拉 自动贴合设备、激光裁切装置以及去废装置,所述麦拉自动贴合设备、激光裁 切装置以及去废装置按工件运输方向依次设置在工作平台上;
[0008]
所述自动叠料翻转铆合装置按工件运输方向依次包括机械手、翻转机构、 定位运输机构和螺母铆合机构;
[0009]
所述翻转机构包括用于堆叠放置工件的翻转平台、驱动翻转平台进行翻转 的翻转驱动装置;
[0010]
所述机械手用于将去废装置中去废后的工件堆叠在翻转平台上。
[0011]
其中,所述麦拉自动贴合设备包括放料装置、下压装置和驱动下压装置沿 x轴方向移动的第一x轴驱动装置,所述下压装置包括下压固定架、驱动下压固 定架沿z轴方向移动的第一z轴驱动装置以及转动连接于下压固定架的下压辊, 所述放料装置包括放料固定架以及转动连接于放料固定架的放料辊,所述放料 固定架与下压固定架固定连接,所述第一z轴驱动装置的输出端与下压固定架 固定连接,所述放料辊和下压辊的转轴均沿y轴方向设置。
[0012]
其中,所述下压固定架包括固定板和设置于固定板下方的轴架,所述固定 板与所述放料固定架固定连接,所述下压辊转动连接于所述轴架,所述固定板 设置有若干通孔,所述轴架的上端凸设有若干突伸出所述通孔的活动杆,所述 活动杆的上端设置有限位块,所述活动杆套接有弹簧,所述弹簧的一端与固定 板的下端抵接,另一端与轴架的上端连接。
[0013]
其中,所述下压装置还包括张力调节装置,所述张力调节装置包括与下压 固定架固定连接的张力调节固定架和转动连接于张力调节固定架的张力调节 辊,所述张力调节
辊用于调节放料辊和下压辊之间的麦拉膜的张力。
[0014]
其中,麦拉自动贴合设备还包括切断装置,所述切断装置包括切断固定架、 切断辅助座和驱动切断固定架沿y轴方向移动的第一y轴驱动装置,所述切断辅 助座设置于固定座的麦拉膜贴合的结束端,所述切断辅助座和固定座之间设置 有切断槽,所述切断固定架的下端设置有于切断槽内进行y轴方向移动的切刀。
[0015]
其中,麦拉自动贴合设备还包括防脱膜装置,所述防脱膜装置包括上压单 元、第一上压辅助座和第二上压辅助座,所述第一上压辅助座和第二上压辅助 座分别设置于固定座的麦拉膜贴合的启动端和结束端,所述第一上压辅助座和 第二上压辅助座分别与固定座之间设置有第一上压槽和第二上压槽,所述上压 单元包括上压杆、第二x轴驱动装置、第二y轴驱动装置、第二z轴驱动装置, 所述第二z轴驱动装置的输出端与上压杆连接,所述第二z轴驱动装置的输入端 与第二y轴驱动装置的输出端连接,所述第二y轴驱动装置的输入端与第二x轴 驱动装置的输入端连接;所述上压杆用于插入第一上压槽或第二上压槽后将麦 拉膜贴合于下压辊的下端。
[0016]
进一步地,麦拉自动贴合设备还包括机架,所述第一x轴驱动装置和第二x 轴驱动装置均设置于机架上。
[0017]
进一步地,所述切断装置还包括第三z轴驱动装置,所述第三z轴驱动装置 的输出端与第一y轴驱动装置的连接。
[0018]
其中,所述去废装置包括用于将工件周边的麦拉膜刮除的刮刀、用于将工 件内部麦拉膜吸附的吸盘、第三z轴驱动装置、第四z轴驱动装置、第三y轴驱 动装置,所述第三z轴驱动装置的输出端与所述刮刀连接,所述第四z轴驱动装 置的输出端与所述吸盘连接,所述第三z轴驱动装置的输入端和第四z轴驱动装 置的输入端均与所述第三y轴驱动装置的输出端连接。
[0019]
其中,所述固定座凹设有若干工件固定槽,所述工件固定槽内开设有去废 辅助孔;所述去废装置还包括用于穿过去废辅助槽将麦拉膜贴合吸盘的顶杆以 及驱动顶杆在z轴方向移动的第五z轴驱动装置。
[0020]
其中,所述翻转机构还包括将堆叠后的工件固定在翻转平台上的夹紧装 置,所述夹紧装置包括在xy轴平面斜向设置的斜臂、与斜臂的上端连接的横臂 以及驱动斜臂沿斜臂的斜向移动的斜向驱动装置,当斜臂斜向下移动后,所述 横臂与工件表面抵触。
[0021]
自动叠料翻转铆合装置按工件运输方向依次包括机械手、翻转机构、定位 运输机构和螺母铆合机构;
[0022]
所述翻转机构包括用于堆叠放置工件的翻转平台、驱动翻转平台进行翻转 的翻转驱动装置;
[0023]
所述机械手用于将工件堆叠在翻转平台上;
[0024]
所述定位运输装置包括用于夹取工件的冶具、驱动冶具在y轴方向移动的 第四y轴驱动装置以及驱动第四y轴驱动装置沿x轴方向移动的第三x轴驱动装 置;
[0025]
所述螺母铆合机构包括用于定位工件的定位导轨、用于将螺母装设到工件 上的螺母分料压入装置、压铆装置和用于检测螺母固定程度的检测装置,所述 螺母分料压入装置、压铆装置和检测装置按工件在定位导轨的运输方向依次设 置。
[0026]
其中,所述机械手为四轴机械手。
[0027]
其中,所述翻转机构还包括将堆叠后的工件固定在翻转平台上的夹紧装 置,所述夹紧装置包括在xy轴平面斜向设置的斜臂、与斜臂的上端连接的横臂 以及驱动斜臂沿斜臂的斜向移动的斜向驱动装置,当斜臂斜向下移动后,所述 横臂与工件表面抵触。
[0028]
其中,所述螺母分料压入装置包括螺母振动盘、与螺母振动盘出料口连通 的螺母运输导轨以及设置于定位导轨下的螺母定位装置,所述螺母定位装置包 括第一定位座、第四x轴驱动装置和第五y轴驱动装置,所述第一定位座设置分 别设置有x轴方向的x滑槽和y轴方向的y滑槽,所述x滑槽上设置有第二定位座, 所述y滑槽上设置有第三定位座,所述第二定位座用于将螺母运输轨道的输出 的螺母进行定位运输,所述第三定位座用于将第二定位座上的螺母运输至定位 导轨下,所述第四x轴驱动装置用于驱动第二定位座在x滑槽上进行x轴方向的 移动,所述第五y轴驱动装置用于驱动第三定位座在y滑槽上进行y轴方向的移 动;所述螺母分料压入装置还包括螺母穿杆以及驱动螺母穿杆在z轴方向移动 的第六z轴驱动装置,所述定位导轨开设有螺母穿孔,所述螺母穿杆用于穿入 固定第一定位座上的螺母并将螺母穿过螺母穿孔压入工件内。
[0029]
其中,所述压铆装置包括压铆杆以及驱动压铆杆在z轴方向移动的冲床, 所述压铆杆的下端凸设有圆环块。
[0030]
其中,所述检测装置包括用于放置工件并将工件上的螺母悬空的垫片、驱 动垫片在y轴方向移动的第六y轴驱动装置、用于冲压螺母的冲压杆以及驱动冲 压杆在z轴方向移动的第七z轴驱动装置。
[0031]
其中,所述定位导轨靠近定位运输机构的上端凸设有凸条。
[0032]
本发明的有益效果在于:本发明可以实现异型工件贴麦拉、裁剪去废、堆 叠铆合的全自动化,精确度高,生产效率好,废品率低,具有广泛的应用前景。
附图说明
[0033]
图1是本发明的结构示意图;
[0034]
图2是本发明的麦拉自动贴合设备的结构示意图;
[0035]
图3是本发明的放料装置和下压装置示意图;
[0036]
图4是本发明的下压装置的局部示意图;
[0037]
图5是本发明的切断装置的示意图;
[0038]
图6是本发明的防脱膜装置的示意图;
[0039]
图7是本发明去废装置的结构示意图;
[0040]
图8是本发明去废装置的局部结构示意图;
[0041]
图9是本发明的自动叠料翻转铆合装置的结构示意图;
[0042]
图10是本发明的翻转机构翻转前的结构示意图;
[0043]
图11是本发明的翻转机构翻转后的结构示意图;
[0044]
图12是本发明的螺母分料压入装置的结构示意图;
[0045]
图13是本发明的螺母分料压入装置的局部结构示意图;
[0046]
图14是本发明的螺母定位装置的结构俯视图;
[0047]
图15是本发明的螺母分料压入装置(无工件)的结构示意图;
[0048]
图16是本发明的定位运输装置的结构示意图;
[0049]
图17是本发明的压铆装置和检测装置的结构示意图;
[0050]
图18是本发明的压铆杆的结构示意图;
[0051]
图19是本发明的检测装置的结构示意图;
[0052]
附图标记为:1-工作平台、2-固定座、21-去废辅助孔、3-麦拉自动贴合 设备、31-工件、32-第一x轴驱动装置、33-固定板、34-轴架、35-通孔、36
-ꢀ
活动杆、37-限位块、38-第一z轴驱动装置、39-下压辊、40-放料固定架、41
-ꢀ
放料辊、42-张力调节固定架、43-张力调节辊、44-切断固定架、45-切断辅助 座、46-第一y轴驱动装置、47-切刀槽、48-切刀、49-第一上压辅助座、50-第 二上压辅助座、51-第一上压槽、52-第二上压槽、53-上压杆、54-第二x轴驱 动装置、55-第二y轴驱动装置、56-第二z轴驱动装置、57-机架、58-第三z 轴驱动装置、4-激光裁切装置、5-去废装置、511-刮刀、522-吸盘、533-第三z 轴驱动装置、544-第四z轴驱动装置、555-第三y轴驱动装置、566-顶杆、577
-ꢀ
第五z轴驱动装置、6-自动叠料翻转铆合装置、61-机械手、62-翻转平台、63
-ꢀ
翻转驱动装置、64-冶具、65-第四y轴驱动装置、66-第三x轴驱动装置、67
-ꢀ
定位导轨、68-凸条、69-斜臂、610-横臂、611-斜向驱动装置、612-螺母振动盘、 613-螺母运输导轨、614-第一定位座、615-x滑槽、616-y滑槽、617-第二定位 座、618-第四x轴驱动装置、619-第三定位座、620-第五y轴驱动装置、21
-ꢀ
螺母穿杆、622-第六z轴驱动装置、623-螺母穿孔、624-压铆杆、625-圆环块、 626-冲床、627-垫片、628-第六y轴驱动装置、629-冲压杆、630-第七z轴驱 动装置、7-工件
具体实施方式
[0053]
为了便于本领域技术人员的理解,下面结合实施例及附图1对本发明作进 一步的说明,实施方式提及的内容并非对本发明的限定。
[0054]
实施例1
[0055]
一种贴膜铆合自动化设备,包括麦拉贴合去废装置5和自动叠料翻转铆合 装置6;
[0056]
所述麦拉贴合去废装置5包括工作平台1、设置于工作平台1上的固定座2、麦拉自动贴合设备3、激光裁切装置4以及去废装置5,所述麦拉自动贴合 设备3、激光裁切装置4以及去废装置5按工件731运输方向依次设置在工作 平台1上;
[0057]
所述自动叠料翻转铆合装置6按工件731运输方向依次包括机械手61、翻 转机构、定位运输机构和螺母铆合机构;
[0058]
所述翻转机构包括用于堆叠放置工件731的翻转平台62、驱动翻转平台 62进行翻转的翻转驱动装置63;
[0059]
所述机械手61用于将去废装置5中去废后的工件731堆叠在翻转平台62 上。
[0060]
本发明可以实现异型工件731贴麦拉、裁剪去废、堆叠铆合的全自动化, 精确度高,生产效率好,废品率低,具有广泛的应用前景。
[0061]
其中,所述麦拉自动贴合设备3包括放料装置、下压装置和驱动下压装置 沿x轴方向移动的第一x轴驱动装置32,所述下压装置包括下压固定架、驱动 下压固定架沿z轴方向移动的第一z轴驱动装置38以及转动连接于下压固定 架的下压辊39,所述放料装置包括放料固定架40以及转动连接于放料固定架 40的放料辊41,所述放料固定架40与下压固定架固定连接,所述第一z轴驱 动装置38的输出端与下压固定架固定连接,所述放料辊41和下压辊39的转 轴均沿y轴方向设置。
[0062]
本发明通过第一z轴驱动装置38驱动下压装置进行下压,下压辊39将放 料辊41释放出来的麦拉膜压合到固定座2的工件731下,而后通过第一x轴 驱动装置32驱动下压装置进行移动,在下压辊39的滚动压力下,放料辊41 的麦拉膜不断释放并被下压辊39压合到工件731表面,直至工件731表面完 全覆盖麦拉膜,第一z轴驱动装置38驱动下压装置上移,第一x轴驱动装置 32驱动下压装置复位,完成一个自动化贴膜循环。在本实施例中,由于下压固 定架和放料固定架40是固定连接的,因此放料装置和下压装置是保持同步运 动的,但是放料辊41下移时不会抵触工件731表面,避免放料辊41压力不足 而导致贴合效果不好,也避免放料辊41压力过大而不利于麦拉膜的释放。
[0063]
其中,所述下压固定架包括固定板33和设置于固定板33下方的轴架34, 所述固定板33与所述放料固定架40固定连接,所述下压辊39转动连接于所 述轴架34,所述固定板33设置有若干通孔35,所述轴架34的上端凸设有若 干突伸出所述通孔35的活动杆36,所述活动杆36的上端设置有限位块37, 所述活动杆36套接有弹簧,所述弹簧的一端与固定板33的下端抵接,另一端 与轴架34的上端连接。
[0064]
由于工件731和固定座2难以保证完全的平整,固定下压位置的下压辊39 压力过大,容易损坏固定座2或工件731,压力过低,贴合效果得不到保障。 本发明的下压辊39安装在轴架34上,由于轴架34上的活动杆36可在固定板 33的通孔35内做z轴方向上的运动,因此轴架34具有一定的自由度。下压固 定架下压时,固定板33通过弹簧对轴架34施加足够的压力,使下压辊39贴 合工件731表面,在下压辊39进行x轴方向的贴合运动时,由于轴架34的自 由度,下压辊39的下压位置可以根据固定座2表面进行微调,从而保持较为 固定的压力,有利于提高贴合效果。
[0065]
其中,所述下压装置还包括张力调节装置,所述张力调节装置包括与下压 固定架固定连接的张力调节固定架42和转动连接于张力调节固定架42的张力 调节辊43,所述张力调节辊43用于调节放料辊41和下压辊39之间的麦拉膜 的张力。
[0066]
张力调节辊43的增设更有助于放料辊41的顺畅释放,避免卡膜或膜的张 力不足而缩卷,降低次品率,提高生产效率。在本实施例中,所述张力调节固 定架42与轴架34固定连接,有利于维持张力调节辊43与下压辊39的相对位 置,保障下压辊39和张力调节辊43之间的麦拉膜需要的张力。
[0067]
其中,麦拉自动贴合设备3还包括切断装置,所述切断装置包括切断固定 架44、切断辅助座45和驱动切断固定架44沿y轴方向移动的第一y轴驱动装 置46,所述切断辅助座45设置于固定座2的麦拉膜贴合的结束端,所述切断 辅助座45和固定座2之间设置有切断槽,所述切断固定架44的下端设置有于 切断槽内进行y轴方向移动的切刀48。
[0068]
本发明的切断装置可以对麦拉膜进行切割,分离放料辊41和工件731表 面贴合好的麦拉膜,提高自动化程度。为此,下压辊39需要进行过量x轴移 动,即下压辊39从固定座2的麦拉膜贴合的启动端开始,经过固定座2的麦 拉膜贴合的结束端,并越过切断槽,停留在切断辅助座45上或继续越过切断 辅助座45,此时下压辊39不会阻挡切刀48运动,因此切刀48可以沿着切断 槽进行y轴方向的运动并对切断槽上的麦拉膜进行切断,并且切刀48槽47的 设置使切刀48的位置可以低于工件731表面,因此更有利于进行切断以及保 护切刀48,若不设置切刀48槽47,则切刀48需要滑过固定座2表面,容易 损坏切刀48,切断效果也容易变差。
[0069]
其中,麦拉自动贴合设备3还包括防脱膜装置,所述防脱膜装置包括上压 单元、第一上压辅助座49和第二上压辅助座50,所述第一上压辅助座49和第 二上压辅助座50分别设置于固定座2的麦拉膜贴合的启动端和结束端,所述 第一上压辅助座49和第二上压辅助座50分别与固定座2之间设置有第一上压 槽51和第二上压槽52,所述上压单元包括上压杆53、第二x轴驱动装置54、 第二y轴驱动装置55、第二z轴驱动装置56,所述第二z轴驱动装置56的输 出端与上压杆53连接,所述第二z轴驱动装置56的输入端与第二y轴驱动装 置55的输出端连接,所述第二y轴驱动装置55的输入端与第二x轴驱动装置 54的输入端连接;所述上压杆53用于插入第一上压槽51或第二上压槽52后 将麦拉膜贴合于下压辊39的下端。
[0070]
当下压辊39与固定座2没有贴合时,下压辊39与麦拉膜不存在压力,因 此麦拉膜容易从下压辊39脱离,从而下次循环时下压辊39无法准确压合麦拉 膜。本发明中,在下压辊39未完全下压时,第二x轴驱动装置54、第二y轴 驱动装置55和第二z轴驱动装置56驱动上压杆53到相应位置,上压杆53将 麦拉膜贴合到下压辊39表面,从而避免麦拉膜脱位;由于下压辊39与下压辊 39贴合时,下压辊39的位置是始终低于麦拉膜的,即完全下压后,上压杆53 的位置要低于固定座2的表面,因此为了下压辊39完全下压前和开始上移时 下压杆能够施加合适的压力,需要增设第一上压辅助座49和第二上压辅助座 50,分别与固定座2形成低于固定座2表面的第一上压槽51和第二上压槽52, 以供下压辊39进行插入。在本实施例中,由于固定座2的麦拉膜贴合的结束 端已经设置有切断辅助座45,因此第二上压辅助座50设置于切断辅助座45 远离固定座2的一端,并且第二上压槽52形成于第二上压辅助座50和切断辅 助座45之间,此外本实施例中,第二上压槽52的底部设置有连接件,实现第 二上压辅助座50和切断辅助座45的一体化,更有利于节省生产成本和降低安 装难度。此外,由于本实施例中,下压辊39是具有一定z轴活动度的,因此 下压辊39停在第一上压槽51和第二上压槽52时,下压辊39会下移并部分卡 嵌于槽内,因此第一上压辅助座49和第二上压辅助座50还具有一定的限位作 用。
[0071]
进一步地,麦拉自动贴合设备3还包括机架57,所述第一x轴驱动装置 32和第二x轴驱动装置54均设置于机架57上。由于第一x轴驱动装置32和 第二x轴驱动装置54的驱动方向是一致的,甚至上压杆53和下压辊39在x 轴方向是优选保持同步运动的,因此将第一x轴驱动装置32和第二x轴驱动 装置54设置于同一个机架57上可以有效节约空间,并且有利于同步化运动 的设置。
[0072]
进一步地,所述切断装置还包括第三z轴驱动装置53358,所述第三z轴 驱动装置53358的输出端与第一y轴驱动装置46的连接。由于切刀48位置若 一直低于固定座2表面,则完成贴合后的固定座2需要进行转移时,切刀48 容易阻碍固定座2转移,因此进一步设置第三z轴驱动装置53358,当不需要 切断时,第三z轴驱动装置53358抬升切刀48使其位置高于固定座2,更有利 于提高效率以及进一步地生产线自动化延伸。
[0073]
其中,所述去废装置5包括用于将工件731周边的麦拉膜刮除的刮刀511、 用于将工件731内部麦拉膜吸附的吸盘522、第三z轴驱动装置53358、第四z 轴驱动装置544、第三y轴驱动装置555,所述第三z轴驱动装置53358的输 出端与所述刮刀511连接,所述第四z轴驱动装置544的输出端与所述吸盘522 连接,所述第三z轴驱动装置53358的输入端和第四z轴驱动装置544的输入 端均与所述第三y轴驱动装置555的输出端连接。
[0074]
本发明的工件731如图所示为异型工件731,即内部为半封闭式的空槽, 因此对于
空槽的废麦拉膜不适用刮除的方式,本发明先利用激光裁切装置4将 废麦拉膜切割出来,而后利用吸盘522将空槽的废麦拉膜进行吸附,而利用刮 刀511对工件731周边的麦拉膜进行刮除,已达到去废的目的。由于本发明在 前序的麦拉自动贴合设备3中可以通过对下压辊39的大小、位置和滚动方式 进行优化,使得工件731在y轴方向的周边不存在多余麦拉膜,而x轴方向的 周边麦拉膜即可以通过y轴方向移动的刮刀511进行刮除,简单高效。
[0075]
其中,所述固定座2凹设有若干工件731固定槽,所述工件731固定槽内 开设有去废辅助孔21;所述去废装置5还包括用于穿过去废辅助槽将麦拉膜贴 合吸盘522的顶杆566以及驱动顶杆566在z轴方向移动的第五z轴驱动装置 577。为了提高吸盘522的吸附效果,顶杆566可以将麦拉膜顶起,避免麦拉 膜与固定座2的粘性过大而无法吸附。
[0076]
自动叠料翻转铆合装置6按工件731运输方向依次包括机械手61、翻转机 构、定位运输机构和螺母铆合机构;
[0077]
所述翻转机构包括用于堆叠放置工件731的翻转平台62、驱动翻转平台 62进行翻转的翻转驱动装置63;
[0078]
所述机械手61用于将工件731堆叠在翻转平台62上;
[0079]
所述定位运输装置包括用于夹取工件731的冶具64、驱动冶具64在y轴 方向移动的第四y轴驱动装置65以及驱动第四y轴驱动装置65沿x轴方向移 动的第三x轴驱动装置66;
[0080]
所述螺母铆合机构包括用于定位工件731的定位导轨67、用于将螺母装设 到工件731上的螺母分料压入装置、压铆装置和用于检测螺母固定程度的检测 装置,所述螺母分料压入装置、压铆装置和检测装置按工件731在定位导轨67 的运输方向依次设置。
[0081]
本发明首先利用机械手61将工件731在翻转平台62上进行堆叠,而后将 工件731进行90
°
翻转,将工件731需要铆合螺母的平面朝上放置,然后定位 运输装置的冶具64将工件731夹取并移动至定位导轨67上进行定向移动,螺 母分料压入装置对螺母进行定位并将螺母初步压入工件731的孔槽中,压铆装 置将工件731向下压铆实现螺母的压合,最后在检测装置检测螺母的稳固性, 完成异型工件731的自动化压铆,精确度高,废品率低。
[0082]
为了更清楚的描述本发明,有必要对工件731进行描述,如图所示,工件 731由4个相同形状的异型铜片组成,其中3个异型铜片上贴合了麦拉膜,因 此需要对异型铜片进行堆叠以实现麦拉膜的电气的绝缘作用,此外本实施例 中,工件731内部为中空设置,但即使工件731为实心结构,也不影响自动叠 料翻转铆合装置6的运作。
[0083]
其中,所述机械手61为四轴机械手61,运动范围大,有利于空间节约。
[0084]
其中,所述翻转机构还包括将堆叠后的工件731固定在翻转平台62上的 夹紧装置,所述夹紧装置包括在xy轴平面斜向设置的斜臂69、与斜臂69的上 端连接的横臂610以及驱动斜臂69沿斜臂69的斜向移动的斜向驱动装置611, 当斜臂69斜向下移动后,所述横臂610与工件731表面抵触。
[0085]
如图所示,所述斜臂69和所述横臂610形成“7”字形结构,当斜臂69 在斜向驱动装置611的作用下斜向下移动时,横臂610靠近工件731表面并最 终形成抵触,从而达到夹紧固定的作用;在翻转平台62翻转后,斜臂69脱离 斜向驱动装置611处于自由状态,因此冶具64夹取工件731并在y轴方向与 翻转平台62远离时,斜臂69自然进行斜向复位,直至横臂610无法与工件731 表面抵触,即完成工件731与翻转平台62的脱离;在本实施例中,如图所
示, 夹紧装置的数量为2个,并且斜臂69斜向穿过工件731的中空部分,在其他 可替代的实施例中,为了适用实心工件731,可将夹紧装置进行镜像对称设置, 斜臂69斜向绕过工件731的外侧而横臂610向内弯折实现对工件731的固定。
[0086]
其中,所述螺母分料压入装置包括螺母振动盘612、与螺母振动盘612出 料口连通的螺母运输导轨613以及设置于定位导轨67下的螺母定位装置,所 述螺母定位装置包括第一定位座614、第四x轴驱动装置618和第五y轴驱动 装置620,所述第一定位座614设置分别设置有x轴方向的x滑槽615和y轴 方向的y滑槽616,所述x滑槽615上设置有第二定位座617,所述y滑槽616 上设置有第三定位座619,所述第二定位座617用于将螺母运输轨道的输出的 螺母进行定位运输,所述第三定位座619用于将第二定位座617上的螺母运输 至定位导轨67下,所述第四x轴驱动装置618用于驱动第二定位座617在x 滑槽615上进行x轴方向的移动,所述第五y轴驱动装置620用于驱动第三定 位座619在y滑槽616上进行y轴方向的移动;所述螺母分料压入装置还包括 螺母穿杆21以及驱动螺母穿杆21在z轴方向移动的第六z轴驱动装置622, 所述定位导轨67开设有螺母穿孔623,所述螺母穿杆21用于穿入固定第一定 位座614上的螺母并将螺母穿过螺母穿孔623压入工件731内。
[0087]
本发明中,螺母振动盘612通过振动实现螺母的整料,并通过螺母运输轨 道运输到第二定位座617,第二定位座617在第一定位座614的x滑槽615进 行滑动并将螺母聚集到中间的第三定位座619中(若直接进行y轴方向运输并 装设螺母,螺母运输导轨613在y轴方向的挤压力容易使螺母偏位),第三定 位座619在y滑槽616进行滑动并将螺母运输至预装位置上,而后螺母穿杆21 闯过螺母穿孔623将螺母提取上来并装入工件731的下端,实现初步的固定。
[0088]
其中,所述压铆装置包括压铆杆624以及驱动压铆杆624在z轴方向移动 的冲床626,所述压铆杆624的下端凸设有圆环块625。由于螺母的上端一部 分是突伸出工件731表面的,因此通过圆环块625的向下凸设,即相当于压铆 杆624的下端内部向上凹设,匹配工件731和螺母的形状,压铆杆624对工件 731施力并使工件731相对于螺母向下运动,从而实现螺母的进一步深固。
[0089]
其中,所述检测装置包括用于放置工件731并将工件731上的螺母悬空的 垫片627、驱动垫片627在y轴方向移动的第六y轴驱动装置628、用于冲压 螺母的冲压杆629以及驱动冲压杆629在z轴方向移动的第七z轴驱动装置 630。若螺母固定程度不足,冲压杆629在第二z轴驱动装置56的作用下对悬 空的螺母进行冲压,可将螺母顶出工件731,从而判断工件731螺母安装不稳, 并可以将螺母和工件731进行回收再重新加工。
[0090]
其中,所述定位导轨67靠近定位运输机构的上端凸设有凸条68。螺母和 工件731的非螺母安装面之间形成卡槽,凸条68突伸入卡槽内可以对工件731 进行一定程度的定位,避免工件731从定位导轨67上脱落,提高工作效率。
[0091]
需要说明的是,本发明的工作平台1为圆形工作平台1,麦拉贴合去废装 置5中定义的x轴是指相应装置在圆形平台位置的切线方向,z轴为相同的上 下方位,y轴进行相应的调整;而自动叠料翻转铆合装置6,由于工件731运 输方向是直线的,因此x轴方向是固定的,也即是x轴方向是对应工件731运 输方向的,视具体的实施方式而定。上述实施例为本发明较佳的实现方案,除 此之外,本发明还可以其它方式实现,在不脱离本发明构思的前提下任何显而 易见的替换均在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips