
 商标分类
商标分类  商标转让
商标转让 
一种激光叉车的智能化自动控制系统的制作方法
 2021-02-20 11:02:43|
2021-02-20 11:02:43| 366|
366| 起点商标网
起点商标网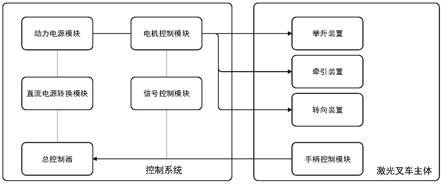
[0001]
本实用新型涉及激光叉车电路控制领域,特别是涉及一种激光叉车的智能化自动控制系统。
背景技术:
[0002]
随着物料输送系统、柔性制造系统、自动化立体仓库系统等的发展, agv(automated guided vehicle,自动运输小车)作为物料输送系统和柔性制造系统中的重要组成部分,可以解决传统物流系统的弊端,在制造业输送环节得到了广泛的应用。其原理为:利用激光的准确性和不发散性对运载机器人所处的位置进行精确定位来指导叉车行走。在叉车的工作场所预先安置了具有一定间隔的反射板,行进中的agv通过车载的旋转激光头发射激光,在激光扫描一周后,照到发射板,激光原路返回,可以得到一系列发射板的反射角,经过计算,即可算得激光旋转中心的坐标。近年来,激光叉车因其智能化程度高、柔性强的特点,越来越受到各类企业的青睐。激光叉车相比于其他导航方式的agv,突破了固定路径导航方式轨迹不能改变和需要铺设导轨的弊端,其只需安装反光板和布置网络等简单的施工,具有转弯半径小、路径更改方便的优势,可直接应用在人工驾驶叉车的使用场景中。一般而言,激光叉车具有升降、转向、牵引等功能,现有的激光叉车是通过方向盘、操作杆等物理机械结构对激光叉车的转向、升降等进行控制。但该种物理控制方式需要操作者在方向盘附近,对其进行操控;而激光叉车的体积一般较为庞大,有时候操作者在使用操作杆、方向盘时,会存在视觉盲区,无法很好地观测到叉车的作业情况;且操作者需要时刻在操作杆附近,无法走动观察周侧情况。另外,物理操作平台的设计,也会增加叉车的重量及体积,使用上较为笨重。
[0003]
因此,针对现有技术中存在的技术问题,亟需提供一种电路结构简单,操作简便,且能够通过手柄对激光叉车进行控制的激光叉车手柄遥控控制技术显得尤为重要。
技术实现要素:
[0004]
本实用新型的目的在于克服上述现有技术的不足,提供一种激光叉车的智能化自动控制系统,该系统通过使用手柄取代物理操作装置(例如方向盘、操作杆等)实现对举升、牵引、转向等操作;通过设计电气电路结构,来实现手柄对激光叉车的电控;同时,采用型号为cvc600的总控制器,来增设多种功能,使激光叉车更加智能化;该控制系统具有操作简便,灵活性好,实用性强,且电路结构简单的优点。
[0005]
为了实现上述目的,本实用新型通过以下技术方案实现:
[0006]
一种激光叉车的智能化自动控制系统,包括激光叉车主体和控制系统;所述激光叉车主体包括手柄、举升装置、牵引装置和转向装置;其中,举升装置配置为用于使激光叉车货叉进行升降移动作业;牵引装置配置为牵引激光叉车主体运动;转向装置配置为控制激光叉车主体进行转向作业;
[0007]
所述手柄、举升装置、牵引装置、转向装置均与控制系统连接;手柄配置为向控制
系统发送按键信号,以使所述控制系统根据按键信号控制所述举升装置、牵引装置或转向装置作业;手柄内设有手柄控制模块,其中,手柄控制模块与手柄上设置的多个按键连接;
[0008]
所述控制系统包括动力电源模块、直流电源转换模块、电机控制模块、信号控制模块和总控制器;所述总控制器配置为与接收来自手柄控制模块的按键信号;
[0009]
动力电源模块包括自动充电电路、电池和动力电源提供电路;电池包括供电端和充电端;所述自动充电电路与电池的充电端连接,配置为向电池的充电端充电;电池的供电端与动力电源提供电路连接,配置为向动力电源提供电路供电;
[0010]
直流电源转换模块配置为接收来自动力电源模块的电压,并经过转换后,为系统提供直流电源;
[0011]
所述电机控制模块包括牵引控制电路、转向控制电路和用于驱动货叉升降的直流液压泵电机;所述牵引控制电路包括交流伺服电机驱动器和交流伺服电机,交流伺服电机与激光叉车主体的牵引装置连接,用于为牵引装置提供动力;所述转向控制电路包括直流转向控制器和直流伺服电机,直流伺服电机与激光叉车主体的转向装置连接,用于为转向装置提供动力;直流液压泵电机与激光叉车主体的举升装置连接,用于为举升装置提供动力;所述交流伺服电机驱动器配置为接收信号控制模块的通断信号,控制交流伺服电机通断;直流转向控制器配置为接收信号控制模块的通断信号,控制直流伺服电机通断;
[0012]
所述信号控制模块包括急停联锁电路、举升控制电路、自动充电控制电路、牵引电机制动电路;急停联锁电路、举升控制电路、自动充电控制电路、牵引电机制动电路均与总控制器的输出引脚连接,配置为接收总控制器的控制信号,以实现控制电路通断,并将通断信号传输至电机控制模块;
[0013]
具体的,急停联锁电路的通断用于控制交流伺服电机驱动器和直流转向控制器的电源供给,从而控制交流伺服电机、直流伺服电机的开启或关闭,进而实现对激光叉车牵引装置、转向装置的控制。
[0014]
具体的,举升控制电路的通断用于控制直流液压泵电机的通断,从而实现对激光叉车举升装置的控制。自动充电控制电路用于控制自动充电电路的通断,进而实现对电池充电的控制;其中,对于电池的充电并非手柄控制,而是通过总控制器判断电池内的电池量是否达到预设的阈值,再通过总控制器输出信号至自动充电控制电路,使电路连通,进而实现对电池的自动充电。而牵引电机制动电路则是通过控制制动器来实现对交流伺服电机的制动,完成对牵引装置的控制。
[0015]
所述总控制器包括输入引脚、输出引脚以及收发引脚;其中,总控制器的输入引脚配置为接收来自手柄控制模块的按键信号,总控制器根据按键信号生成控制信号,并经输出引脚将该控制信号发送至信号控制模块,以使信号控制模块控制电机控制模块的通断;所述总控制器的收发引脚配置为与其他模块进行数据交互。
[0016]
具体的,上述技术方案的原理为:用户操作手柄上的按键,按键触发后,手柄控制模块发送对应的信号至控制系统的总控制器,总控制器生成对应的控制信号,并通过总控制器的输出引脚将信号输出至电机控制模块;例如用户在手柄上按下“牵引”按钮,此时,手柄控制模块发送牵引按钮受触发的信号给总控制器;总控制器根据该按键信号,选中牵引控制电路并触发其导通,此时动力电源模块为牵引控制电路供电的电路导通,交流伺服电机驱动器驱动交流伺服电机启动,进而实现对牵引装置的启动。而当用户按下“急停”按钮,
则手柄控制模块发送该按键所对应的信号给总控制器,总控制器根据该按键信号,选中急停联锁电路,此时牵引控制电路断开,则交流伺服电机驱动器关闭,停止对交流伺服电机的驱动,进而实现对牵引装置的暂停。对于其他模块的控制原理,与前述原理相同,在此不再赘述。
[0017]
以上的,所述总控制器的型号为cvc600。
[0018]
以上的,所述自动充电电路包括自动充电电极和第三接触器,第三接触器两端分别接自动充电电极正极、电池充电端正极,电池充电端负极接自动充电电极 cha负极;动力电源提供电路至少包括急停按钮、钥匙开关、第一接触器、第二接触器;所述急停按钮一端与电池供电端正极连接,另一端分别与钥匙开关、第一接触器、第二接触器连接;电池供电端负极、钥匙开关另一端分别与直流电源转换模块负极、正极连接;第一接触器另一端与直流液压泵电机连接;第二接触器另一端分为两条支路,其中一条支路与直流转向控制器连接,另一条支路与交流伺服电机驱动器连接;
[0019]
具体的,第一接触器所在的线路是用于控制电池对直流液压泵电机的供电,接触器的闭合或断开实现对电机的控制;第二接触器所在线路分为两条支路,该两条支路分别实现对直流转向控制器、交流伺服电机驱动器的供电。而钥匙开关所在线路则用于对直流电源转换模块供电。
[0020]
以上的,直流电源转换模块包括dc/dc转换芯片。
[0021]
以上的,所述手柄控制模块的型号为mcd8。
[0022]
以上的,所述交流伺服电机驱动器至少包括电源连接引脚,与交流伺服电机连接的三相电机连接引脚,以及与总控制器连接的收发引脚;其中,交流伺服电机驱动器的电源连接引脚正极端与第二接触器连接,其电源连接引脚负极端接 0v/24v电源;其中,所述直流转向控制器至少包括电源连接引脚,与直流伺服电机连接的电机连接引脚,以及与总控制器连接的收发引脚;其中,直流转向控制器的电源连接引脚正极端与第二接触器连接,其电源连接引脚负极端接0v/24v电源;其中,所述直流液压泵电机一端与第一接触器连接,另一端接 0v/24v电源。
[0023]
优选的,所述交流伺服电机驱动器的型号为acd175;直流转向控制器的型号为dcd50。
[0024]
以上的,所述急停联锁电路包括第一中间继电器,第一中间继电器一端与总控制器输出引脚连接,另一端连接第二接触器;急停联锁电路用于控制交流伺服电机驱动器或直流转向控制器的通断;
[0025]
所述举升控制电路包括货叉上升控制电路和货叉下降控制电路,货叉上升控制电路包括第二中间继电器,第二中间继电器一端接总控制器输出引脚,另一端连接第一接触器,货叉上升控制电路用于控制直流液压泵电机的通断;
[0026]
所述自动充电控制电路包括第四中间继电器,第四中间继电器一端接总控制器输出引脚,另一端与第三接触器连接;自动充电控制电路用于控制自动充电电路的通断;货叉下降控制电路用于控制货叉下降;
[0027]
所述牵引电机制动电路包括第三中间继电器和制动器,第三中间继电器一端接总控制器输出引脚,另一端与制动器连接;制动器另一端接交流伺服电机驱动器。
[0028]
以上的,所述直流转向控制器还包括四个输出端口,分别用于输出前侧激光区域
切换信号、左侧激光区域切换信号、右侧激光区域切换信号和后侧激光区域切换信号;且该四个输出端口分别与四个安全扫描仪连接;其中,四个安全扫描仪分别为前激光扫描仪、左激光扫描仪、右激光扫描仪和后激光扫描仪。
[0029]
具体的,上述四个安全扫描仪分别用于检测激光叉车前后左右的障碍情况,并反馈给直流转向控制器,通过直流转向控制器实现对不同方位扫描仪的切换。
[0030]
以上的,所述控制系统还包括与总控制器连接的显示模块;其中,显示模块的型号为opt100。
[0031]
本实用新型的有益效果:
[0032]
本实用新型提供了一种激光叉车的智能化自动控制系统,该系统通过使用手柄取代物理操作装置(例如方向盘、操作杆等)实现对举升、牵引、转向等操作;通过设计电气电路结构,来实现手柄对激光叉车的电控;且激光叉车无需设置物理装置,使激光叉车的重量、体积均能相应减小,能够有效节约控制系统的供电;同时,采用型号为cvc600的总控制器,来增设多种功能,使激光叉车更加智能化;该控制系统具有操作简便,灵活性好,实用性强的优点,且电路结构简单。
附图说明
[0033]
图1为本实用新型提供的自动控制系统的电路原理框架图。
具体实施方式
[0034]
下面结合附图对本实用新型的具体实施方式作进一步说明。
[0035]
如图1所示,本实施例提供了一种激光叉车的智能化自动控制系统,包括激光叉车主体和控制系统;所述激光叉车主体包括手柄、举升装置、牵引装置和转向装置;其中,举升装置配置为用于使激光叉车货叉进行升降移动作业;牵引装置配置为牵引激光叉车主体运动;转向装置配置为控制激光叉车主体进行转向作业;
[0036]
所述手柄、举升装置、牵引装置、转向装置均与控制系统连接;手柄配置为向控制系统发送按键信号,以使所述控制系统根据按键信号控制所述举升装置、牵引装置或转向装置作业;手柄内设有手柄控制模块,其中,手柄控制模块与手柄上设置的多个按键连接;
[0037]
所述控制系统包括动力电源模块、直流电源转换模块、电机控制模块、信号控制模块和总控制器;所述总控制器配置为与接收来自手柄控制模块的按键信号;
[0038]
动力电源模块包括自动充电电路、电池和动力电源提供电路;电池包括供电端和充电端;所述自动充电电路与电池的充电端连接,配置为向电池的充电端充电;电池的供电端与动力电源提供电路连接,配置为向动力电源提供电路供电;
[0039]
直流电源转换模块配置为接收来自动力电源模块的电压,并经过转换后,为系统提供直流电源;
[0040]
所述电机控制模块包括牵引控制电路、转向控制电路和用于驱动货叉升降的直流液压泵电机;所述牵引控制电路包括交流伺服电机驱动器和交流伺服电机,交流伺服电机与激光叉车主体的牵引装置连接,用于为牵引装置提供动力;所述转向控制电路包括直流转向控制器和直流伺服电机,直流伺服电机与激光叉车主体的转向装置连接,用于为转向装置提供动力;直流液压泵电机与激光叉车主体的举升装置连接,用于为举升装置提供动
力;所述交流伺服电机驱动器配置为接收信号控制模块的通断信号,控制交流伺服电机通断;直流转向控制器配置为接收信号控制模块的通断信号,控制直流伺服电机通断;在本实施例中,所述交流伺服电机驱动器的型号为acd175;直流转向控制器的型号为dcd50。
[0041]
所述信号控制模块包括急停联锁电路、举升控制电路、自动充电控制电路、牵引电机制动电路;急停联锁电路、举升控制电路、自动充电控制电路、牵引电机制动电路均与总控制器的输出引脚连接,配置为接收总控制器的控制信号,以实现控制电路通断,并将通断信号传输至电机控制模块;
[0042]
具体的,急停联锁电路的通断用于控制交流伺服电机驱动器和直流转向控制器的电源供给,从而控制交流伺服电机、直流伺服电机的开启或关闭,进而实现对激光叉车牵引装置、转向装置的控制。
[0043]
具体的,举升控制电路的通断用于控制直流液压泵电机的通断,从而实现对激光叉车举升装置的控制。自动充电控制电路用于控制自动充电电路的通断,进而实现对电池充电的控制;其中,对于电池的充电并非手柄控制,而是通过总控制器判断电池内的电池量是否达到预设的阈值,再通过总控制器输出信号至自动充电控制电路,使电路连通,进而实现对电池的自动充电。而牵引电机制动电路则是通过控制制动器来实现对交流伺服电机的制动,完成对牵引装置的控制。
[0044]
所述总控制器包括输入引脚、输出引脚以及收发引脚;其中,总控制器的输入引脚配置为接收来自手柄控制模块的按键信号,总控制器根据按键信号生成控制信号,并经输出引脚将该控制信号发送至信号控制模块,以使信号控制模块控制电机控制模块的通断;所述总控制器的收发引脚配置为与其他模块进行数据交互。
[0045]
具体的,上述技术方案的原理为:用户操作手柄上的按键,按键触发后,手柄控制模块发送对应的信号至控制系统的总控制器,总控制器生成对应的控制信号,并通过总控制器的输出引脚将信号输出至电机控制模块;例如用户在手柄上按下“牵引”按钮,此时,手柄控制模块发送牵引按钮受触发的信号给总控制器;总控制器根据该按键信号,选中牵引控制电路并触发其导通,此时动力电源模块为牵引控制电路供电的电路导通,交流伺服电机驱动器驱动交流伺服电机启动,进而实现对牵引装置的启动。而当用户按下“急停”按钮,则手柄控制模块发送该按键所对应的信号给总控制器,总控制器根据该按键信号,选中急停联锁电路,此时牵引控制电路断开,则交流伺服电机驱动器关闭,停止对交流伺服电机的驱动,进而实现对牵引装置的暂停。对于其他模块的控制原理,与前述原理相同,在此不再赘述。
[0046]
在本实施例中,所述总控制器的型号为cvc600。
[0047]
在本实施例中,所述自动充电电路包括自动充电电极和第三接触器,第三接触器两端分别接自动充电电极正极、电池充电端正极,电池充电端负极接自动充电电极负极;动力电源提供电路至少包括急停按钮、钥匙开关、第一接触器、第二接触器;所述急停按钮一端与电池供电端正极连接,另一端分别与钥匙开关、第一接触器、第二接触器连接;电池供电端负极、钥匙开关另一端分别与直流电源转换模块负极、正极连接;第一接触器另一端与直流液压泵电机连接;第二接触器另一端分为两条支路,其中一条支路与直流转向控制器连接,另一条支路与交流伺服电机驱动器连接;
[0048]
具体的,第一接触器所在的线路是用于控制电池对直流液压泵电机的供电,接触
器的闭合或断开实现对电机的控制;第二接触器所在线路分为两条支路,该两条支路分别实现对直流转向控制器、交流伺服电机驱动器的供电。而钥匙开关所在线路则用于对直流电源转换模块供电。
[0049]
在本实施例中,直流电源转换模块包括dc/dc转换芯片,用于对电压进行转换后输出,为系统芯片供电。
[0050]
在本实施例中,所述手柄控制模块的型号为mcd8。
[0051]
在本实施例中,所述交流伺服电机驱动器至少包括电源连接引脚,与交流伺服电机连接的三相电机连接引脚,以及与总控制器连接的收发引脚;其中,交流伺服电机驱动器的电源连接引脚正极端与第二接触器连接,其电源连接引脚负极端接0v/24v电源;
[0052]
所述直流转向控制器至少包括电源连接引脚,与直流伺服电机连接的电机连接引脚,以及与总控制器连接的收发引脚;其中,直流转向控制器的电源连接引脚正极端与第二接触器连接,其电源连接引脚负极端接0v/24v电源;
[0053]
所述直流液压泵电机一端与第一接触器连接,另一端接0v/24v电源。
[0054]
在本实施例中,所述急停联锁电路包括第一中间继电器,第一中间继电器一端与总控制器输出引脚连接,另一端连接第二接触器;急停联锁电路用于控制交流伺服电机驱动器或直流转向控制器的通断;
[0055]
所述举升控制电路包括货叉上升控制电路和货叉下降控制电路,货叉上升控制电路包括第二中间继电器,第二中间继电器一端接总控制器输出引脚,另一端连接第一接触器,货叉上升控制电路用于控制直流液压泵电机的通断;货叉下降控制电路用于控制货叉下降;
[0056]
所述自动充电控制电路包括第四中间继电器,第四中间继电器一端接总控制器输出引脚,另一端与第三接触器连接;自动充电控制电路用于控制自动充电电路的通断;
[0057]
所述牵引电机制动电路包括第三中间继电器和制动器,第三中间继电器一端接总控制器输出引脚,另一端与制动器连接;制动器另一端接交流伺服电机驱动器。
[0058]
在本实施例中,所述直流转向控制器还包括四个输出端口,分别用于输出前侧激光区域切换信号、左侧激光区域切换信号、右侧激光区域切换信号和后侧激光区域切换信号;且该四个输出端口分别与四个安全扫描仪连接;其中,四个安全扫描仪分别为前激光扫描仪、左激光扫描仪、右激光扫描仪和后激光扫描仪。上述四个安全扫描仪分别用于检测激光叉车前后左右的障碍情况,并反馈给直流转向控制器,通过直流转向控制器实现对不同方位扫描仪的切换。
[0059]
根据上述说明书的揭示和教导,本实用新型所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本实用新型并不局限于上面揭示和描述的具体实施方式,对实用新型的一些修改和变更也应当落入本实用新型的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本实用新型构成任何限制。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips