
 商标分类
商标分类  商标转让
商标转让 
码垛产品自动捆扎装置的制作方法
 2021-02-20 07:02:56|
2021-02-20 07:02:56| 263|
263| 起点商标网
起点商标网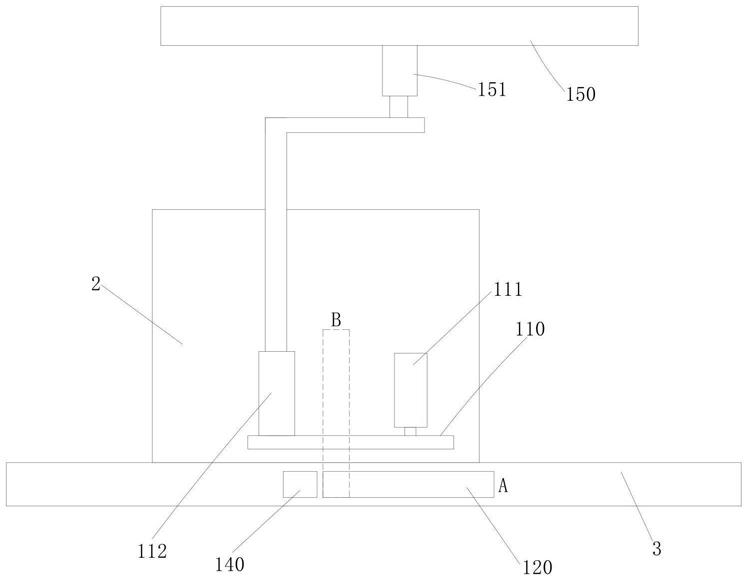
[0001]
本实用新型涉及货物捆扎技术领域,尤其涉及一种码垛产品自动捆扎装置。
背景技术:
[0002]
在产品(如饮料)完成生产、装箱并码垛后,需要用薄膜缠绕捆扎后进行运输,薄膜具有缓冲的作用。
[0003]
传统的自动捆扎设备在每个捆扎过程(完成一次码垛产品捆扎)开始前,均需要人工将薄膜卷上薄膜的头端进行固定,形成缠绕捆扎的膜头,效率较低。
技术实现要素:
[0004]
基于此,针对上述技术问题,提供一种码垛产品自动捆扎装置。
[0005]
为解决上述技术问题,本实用新型采用如下技术方案:
[0006]
一种码垛产品自动捆扎装置,包括:
[0007]
可围绕码垛产品水平转动并上下移动以完成每个捆扎过程的放卷架,所述放卷架上具有用于竖直设置薄膜卷的放卷辊;
[0008]
用于在夹膜位依次执行张开、夹紧动作以释放当前膜头并夹住经过的薄膜的夹手,所述夹膜位位于所述捆扎过程最后一圈的路径上;
[0009]
用于在所述放卷架结束捆扎过程最后第二圈后将所述夹手从初始位移动至所述夹膜位并待夹手夹住薄膜后使该夹手返回初始位的夹手移动机构,所述夹手移动机构与所述夹手连接;
[0010]
用于在所述夹手夹住薄膜后从码垛产品与夹手之间切断薄膜从而形成新的膜头的薄膜切断机构。
[0011]
本实用新型还包括上架,所述上架上具有竖直的转动电机,所述放卷架通过升降机构固定于一倒l形的转臂上,所述转臂与所述转动电机连接。
[0012]
所述夹手包括气缸、弹簧以及多个夹块,所述弹簧与气缸上下布置,该弹簧的下端与所述气缸固定,上端与所述气缸的活塞杆固定,所述多个夹块上下依次固定于所述弹簧圈部的外侧。
[0013]
所述夹块呈环状,该夹块同心固定于所述弹簧圈部的外侧。
[0014]
所述夹手移动机构包括用于将平躺状态的夹手从初始位90度上下翻转至夹膜位的第一翻转电机,所述第一翻转电机与所述夹手的气缸连接。
[0015]
所述薄膜切断机构包括熔断头以及用于带动所述熔断头从平躺状态90度上下翻转至竖直状态以恰好从码垛产品与夹手之间切断薄膜的第二翻转电机,所述第二翻转电机与熔断头连接。
[0016]
本实用新型只需在第一次捆扎前,由人工将放卷架上薄膜卷的薄膜头端固定至夹手上,后续对每个码垛产品进行捆扎前,均会自动形成新的膜头,不需要再人工将薄膜头端固定至夹手上,提高了效率。
附图说明
[0017]
下面结合附图和具体实施方式本实用新型进行详细说明:
[0018]
图1为本实用新型的结构示意图;
[0019]
图2为本实用新型的夹手的结构示意图;
[0020]
图3为本实用新型的夹手以及熔断头平躺状态的俯视图。
[0021]
图4(a)为本实用新型在捆扎前的状态示意图,图4(b)为新膜头形成示意图。
具体实施方式
[0022]
如图1以及图2所示,一种码垛产品自动捆扎装置,包括放卷架110、夹手120、夹手移动机构130以及薄膜切断机构140。
[0023]
放卷架110可围绕码垛产品2水平转动并上下移动,从而完成每个捆扎过程,放卷架110上具有用于竖直设置薄膜卷的放卷辊111。
[0024]
其中,捆扎过程是指对码垛产品2进行一次捆扎的过程,在此过程中,放卷架110绕码垛产品2水平转动的同时上下移动,如放卷架110可以从码垛产品2的下侧开始水平转动,同时逐渐上升至码垛产品2的上侧,然后再下降至码垛产品2的下侧,完成一次捆扎。
[0025]
夹手120用于在夹膜位b依次执行张开、夹紧动作,从而释放当前膜头并夹住经过的薄膜,上述夹膜位位于上述捆扎过程最后一圈的路径上。
[0026]
夹手移动机构130与夹手120连接,用于在放卷架110结束捆扎过程的最后第二圈后将夹手120从初始位a移动至夹膜位b,并待夹手120夹住薄膜后使该夹手120返回初始位,这样可以防止夹手120与放卷架110产生干涉。
[0027]
薄膜切断机构140用于在夹手夹住薄膜后从码垛产品2与夹手120之间切断薄膜,使完成捆扎的码垛产品2与放卷架110分离,从而形成新的膜头,便于对下一个码垛产品2进行捆扎。
[0028]
在开始捆扎前,如图4(a)所示,由人工将放卷架110上薄膜卷4的薄膜头端固定至初始位a的夹手120上,形成膜头41,开始捆扎过程,当放卷架110结束该捆扎过程的最后第二圈后,夹手移动机构130将夹手120移动至夹膜位b,此时,如图4(b)所示,夹手120张开释放当前膜头41,当放卷架110上的薄膜经过张开的夹手120时,夹手120夹住薄膜,之后,薄膜切断机构140从码垛产品2与夹手120之间切断薄膜,从而形成新的膜头。
[0029]
本实用新型只需在第一次捆扎前,由人工将放卷架上薄膜卷的薄膜头端固定至夹手上,后续对每个码垛产品进行捆扎前,均会自动形成新的膜头,不需要再人工将薄膜头端固定至夹手上,提高了效率。
[0030]
如图1所示,在本实施例中还设置了上架150,上架150上具有竖直的转动电机151,放卷架110通过升降机构112固定于一倒l形的转臂113上,转臂113与转动电机151连接,通过转动电机151以及升降机构112可以实现放卷架110围绕码垛产品2水平转动并上下移动。
[0031]
较佳地,上架150上还可以设置若干用于张紧薄膜的张紧辊。
[0032]
在本实施例中,如图2所示,夹手120包括气缸121、弹簧122以及多个夹块123,弹簧122与气缸121上下布置,该弹簧122的下端与气缸121固定,上端与气缸121的活塞杆121a固定,多个夹块123上下依次固定于弹簧122圈部的外侧,活塞杆121a伸出可以执行张开动作,缩回可以执行夹紧动作。
[0033]
具体地,夹块123呈环状,该夹块123同心固定于弹簧122圈部的外侧。
[0034]
夹手移动机构130包括用于将平躺状态的夹手120从初始位90度由下至上翻转至夹膜位的第一翻转电机131,第一翻转电机131与夹手120的气缸121连接。
[0035]
薄膜切断机构140包括熔断头141以及用于带动熔断头从平躺状态90度由下至上翻转至竖直状态以恰好从码垛产品2与夹手120之间切断薄膜的第二翻转电机142,第二翻转电机142与熔断头141连接。
[0036]
具体地,如图1以及图3所示,第一翻转电机131以及第二翻转电机142均固定在码垛产品输送带侧面的挡边3上,夹手120在平躺状态时与挡边3平行,熔断头141在平躺状态时与挡边3垂直。
[0037]
较佳地,可以在一控制器中预设捆扎过程中放卷架110的行程,当放卷架110结束捆扎过程的最后第二圈后,控制器控制第一翻转电机131将平躺状态的夹手120从初始位90度由下至上翻转至夹膜位,并且夹手的张开和夹紧以及薄膜切断机构140的动作均可以根据放卷架110的行程由控制器进行控制。
[0038]
但是,本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本实用新型,而并非用作为对本实用新型的限定,只要在本实用新型的实质精神范围内,对以上所述实施例的变化、变型都将落在本实用新型的权利要求书范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 电机

 热门咨询
热门咨询




tips