
 商标分类
商标分类  商标转让
商标转让 
叉式AGV搬运穿梭车精确放置巷道的控制系统及方法与流程
 2021-02-19 20:02:56|
2021-02-19 20:02:56| 329|
329| 起点商标网
起点商标网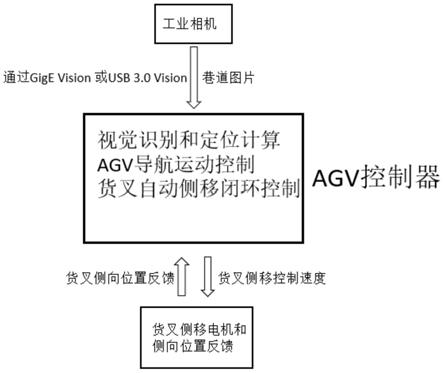
叉式agv搬运穿梭车精确放置巷道的控制系统及方法
技术领域
[0001]
本发明涉及agv技术领域,尤其涉及叉式agv搬运穿梭车精确放置巷道的控制系统及方法。
背景技术:
[0002]
agv,全称automated guided vehicle,一般应用于物流系统或工厂内,用于根据用户指令自动将货物运送到目的地,也可将穿梭车搬运到指定货架上的指定巷道。当货架上的巷道层数较少时,例如只有一两层时,agv一般都能够将穿梭车准确放置到指定巷道。但当货架上的巷道层数较多时,例如三层以上,此时如果地面稍不平整,agv(或者货架)会有一定角度的倾斜(左右倾斜、或者前后倾斜),即使很小角度的倾斜,随着agv货叉的升高,货叉相对于货架的位置偏移会逐渐加大,而穿梭车的放置对精度要求较高,三层及更高层的位置,很可能因为随高度的升高而增大的偏差而无法将穿梭车放置到相应巷道中。此问题亟需解决。
技术实现要素:
[0003]
鉴于目前现有技术的不足,本发明的目的在于提供一种准确平稳放置穿梭车的叉式agv搬运穿梭车精确放置巷道的控制系统及方法。
[0004]
为达到上述目的,本发明的实施例采用如下技术方案:一种叉式agv搬运穿梭车精确放置巷道的控制系统,所述控制系统包括:叉式agv,其上设有agv控制器,控制叉式agv根据指令搬运穿梭车行驶到指定位置,并将穿梭车放置到指定货架上的指定巷道;工业相机,设置于叉式agv上,对货架上的巷道进行拍摄,并将拍摄的巷道图片发送给所述agv控制器;所述agv控制器根据所述工业相机拍摄的巷道图片,进行视觉识别和定位计算,对巷道定位,控制货叉自动侧移,使穿梭车精确放置到巷道。
[0005]
进一步,所述叉式agv上还设有货叉侧移电机和侧向位置反馈装置,所述agv控制器将货叉侧移控制速度发送给货叉侧移电机以控制货叉自动侧移,所述侧向位置反馈装置反馈货叉侧向位置给所述agv控制器,所述agv控制器对货叉自动侧移进行闭环控制。
[0006]
进一步,所述叉式agv上还设有激光导航装置,所述激光导航装置与所述agv控制器配合对所述叉式agv进行导航运动控制。
[0007]
进一步,所述工业相机为红外相机。
[0008]
进一步,所述agv控制器与所述工业相机通过gige vision协议或usb 3.0 vision协议相连。
[0009]
一种叉式agv搬运穿梭车精确放置巷道的控制方法,所述控制方法包括:配置叉式agv,其上设有agv控制器,控制叉式agv根据指令搬运穿梭车行驶到指定位置,并将穿梭车放置到指定货架上的指定巷道;配置工业相机,设置于叉式agv上,对货架上的巷道进行拍摄,并将拍摄的巷道图片发
送给所述agv控制器;所述agv控制器根据所述工业相机拍摄的巷道图片,进行视觉识别和定位计算,对巷道定位,控制货叉自动侧移,使穿梭车精确放置到巷道。
[0010]
进一步,所述叉式agv上还设有货叉侧移电机和侧向位置反馈装置,所述agv控制器将货叉侧移控制速度发送给货叉侧移电机以控制货叉自动侧移,所述侧向位置反馈装置反馈货叉侧向位置给所述agv控制器,所述agv控制器对货叉自动侧移进行闭环控制。
[0011]
进一步,所述叉式agv上还设有激光导航装置,所述激光导航装置用于与所述agv控制器配合对所述叉式agv进行导航运动控制。
[0012]
本发明所述叉式agv搬运穿梭车精确放置巷道的控制系统及方法,包括:叉式agv,其上设有agv控制器,控制叉式agv根据指令搬运穿梭车行驶到指定位置,并将穿梭车放置到指定货架上的指定巷道;工业相机,设置于叉式agv上,对货架上的巷道进行拍摄,并将拍摄的巷道图片发送给所述agv控制器;所述agv控制器根据所述工业相机拍摄的巷道图片,进行视觉识别和定位计算,对巷道定位,控制货叉自动侧移,使穿梭车精确放置到巷道。如此,叉式agv在搬运放置穿梭车时,可以通过工业相机获取到相应巷道的实际位置,并控制货叉自动侧移,可确保将穿梭车准确平稳的放置到指定巷道;而且无论多少层,均可以平稳放置。
附图说明
[0013]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0014]
图1为本发明一实施方式一种叉式agv搬运穿梭车精确放置巷道的控制系统的结构示意图。
具体实施方式
[0015]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0016]
请参见图1所示,为本发明一实施方式一种叉式agv搬运穿梭车精确放置巷道的控制系统的结构示意图。所述叉式agv搬运穿梭车精确放置巷道的控制系统,包括:叉式agv,其上设有agv控制器,控制叉式agv根据指令搬运穿梭车行驶到指定位置,并将穿梭车放置到指定货架上的指定巷道;工业相机,设置于叉式agv上,对货架上的巷道进行拍摄,并将拍摄的巷道图片发送给所述agv控制器;所述agv控制器根据所述工业相机拍摄的巷道图片,进行视觉识别和定位计算,对巷道定位,控制货叉自动侧移,使穿梭车精确放置到巷道。如此,叉式agv在搬运放置穿梭车时,可以通过工业相机获取到相应巷道的实际位置,并控制货叉自动侧移,可确保将穿梭车准确平稳的放置到指定巷道;而且无论多少层,均可以平稳放置。
[0017]
其中,所述工业相机为红外相机,如此,可以用于夜间或光线不好的场合。所述agv
控制器与所述工业相机通过gige vision协议或usb 3.0 vision协议相连。
[0018]
进一步,所述叉式agv上还设有货叉侧移电机和侧向位置反馈装置,所述agv控制器将货叉侧移控制速度发送给货叉侧移电机以控制货叉自动侧移,所述侧向位置反馈装置反馈货叉侧向位置给所述agv控制器,所述agv控制器对货叉自动侧移进行闭环控制。如此,agv控制器可以实时调整货叉侧移的距离,更加精确的控制货叉将穿梭车放置到巷道上。
[0019]
又,所述叉式agv上还设有激光导航装置,所述激光导航装置与所述agv控制器配合对所述叉式agv进行导航运动控制,用于控制叉式agv根据用户指令自动行驶,即可将穿梭车搬运到指定货位。
[0020]
本发明还提供一种叉式agv搬运穿梭车精确放置巷道的控制方法,包括:配置叉式agv,其上设有agv控制器,控制叉式agv根据指令搬运穿梭车行驶到指定位置,并将穿梭车放置到指定货架上的指定巷道;配置工业相机,设置于叉式agv上,对货架上的巷道进行拍摄,并将拍摄的巷道图片发送给所述agv控制器;所述agv控制器根据所述工业相机拍摄的巷道图片,进行视觉识别和定位计算,对巷道定位,控制货叉自动侧移,使穿梭车精确放置到巷道。如此,叉式agv在搬运放置穿梭车时,可以通过工业相机获取到相应巷道的实际位置,并控制货叉自动侧移,可确保将穿梭车准确平稳的放置到指定巷道;而且无论多少层,均可以平稳放置。
[0021]
进一步,所述叉式agv上还设有货叉侧移电机和侧向位置反馈装置,所述agv控制器将货叉侧移控制速度发送给货叉侧移电机以控制货叉自动侧移,所述侧向位置反馈装置反馈货叉侧向位置给所述agv控制器,所述agv控制器对货叉自动侧移进行闭环控制。如此,agv控制器可以实时调整货叉侧移的距离,更加精确的控制货叉将穿梭车放置到巷道上。
[0022]
又,所述叉式agv上还设有激光导航装置,所述激光导航装置用于与所述agv控制器配合对所述叉式agv进行导航运动控制,用于控制叉式agv根据用户指令自动行驶,即可将穿梭车搬运到指定货位。
[0023]
本发明所述叉式agv搬运穿梭车精确放置巷道的控制系统及方法,包括:叉式agv,其上设有agv控制器,控制叉式agv根据指令搬运穿梭车行驶到指定位置,并将穿梭车放置到指定货架上的指定巷道;工业相机,设置于叉式agv上,对货架上的巷道进行拍摄,并将拍摄的巷道图片发送给所述agv控制器;所述agv控制器根据所述工业相机拍摄的巷道图片,进行视觉识别和定位计算,对巷道定位,控制货叉自动侧移,使穿梭车精确放置到巷道。如此,叉式agv在搬运放置穿梭车时,可以通过工业相机获取到相应巷道的实际位置,并控制货叉自动侧移,可确保将穿梭车准确平稳的放置到指定巷道;而且无论多少层,均可以平稳放置。
[0024]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域技术的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips