
 商标分类
商标分类  商标转让
商标转让 
一种可用触摸屏设定宽度的手提袋折叠机的制作方法
 2021-02-19 16:02:24|
2021-02-19 16:02:24| 353|
353| 起点商标网
起点商标网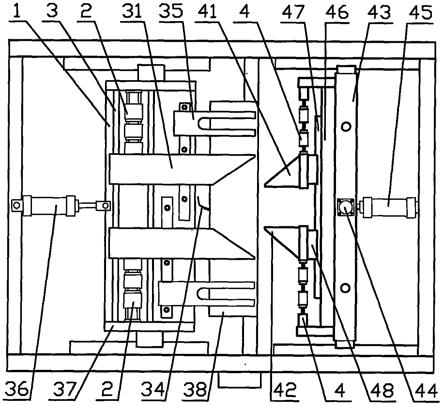
[0001]
本实用新型涉及一种可用触摸屏设定宽度的手提袋折叠机。
背景技术:
[0002]
本实用新型所述的手提袋是一种具有两个提手状态的塑料手提袋,也称背心袋、方便袋、手提购物袋等。经过制袋机生产出来的塑料袋一般是几十条为一摞,然后通过手提袋折叠机将其折叠成长方形。手提袋折叠机主要包括袋体折叠装置和把手折叠装置两部分,在本实用新型中对手提袋宽度的设定和调节主要涉及到把手折叠装置。授权公告号cn208361526u公开了一种手提袋折叠机构(下称对比文件1),包括把手折叠装置、袋体折叠装置。其中的把手折叠装置包括有托袋板(左托板和右托板)、把手折叠导向部件(导向板)、与导向部件配合对手提袋的把手进行折叠的折叠部件以及防止把手松散的定位部件,还包括有可以左右移动的左推板和右推板、移动部件(滑台)等。授权公开号cn208867634u公开了一种制袋机的可调折叠结构(下称对比文件2),主要包括:侧板、可调管正装置、压平压痕装置、移动装置、袋头折叠装置和袋体折叠装置;所述的袋头折叠装置设于可调管正装置的下方。对比文件2中所述的袋头折叠装置相当于对比文件1的把手折叠装置,其区别是把左推板和右推板安装在了压痕板横梁上;把导板分成两个三角板,并且使两个三角板之间的距离可调;所述的管正板相当于对比文件1的左托板、右托板,可采用丝杠对左托板和右托板之间的距离进行手工调整,从而实现对手提袋袋宽度的手动调节。授权公告号cn103318698b公开了一种双线塑料袋折叠机的提手折叠装置(下称对比文件3),提手折叠装置相当于对比文件1的把手折叠装置,其中的提手上翻托盘于对比文件1中的左托板、右托板是相同的技术特征,也是通过调整两个提手上翻托盘(左托板和右托板)的相对距离来对相应宽度的手提袋进行折叠的。
[0003]
无论是对比文件1还是对比文件2和3,对于手提袋宽度的调节都需要人工手动来完成。一提到自动控制,人们自然会联想到伺服电机、步进电机等,伺服电机可驱动运动件在多个位置上停留,并且可以采用触摸屏设置。但是伺服电机不仅价格昂贵,而且重量大,还需要配备滚珠丝杆等繁琐的机构,连线太多,不适合在手提袋折叠机这种冲击力大、托袋板相对于机架运动的场合。
技术实现要素:
[0004]
本实用新型所要解决的技术问题是:一种可用触摸屏设定宽度的手提袋折叠机,连接相应的调整装置,为手提袋折叠机提供一种结构简单稳定、成本低廉的一种可用触摸屏设定宽度的手提袋折叠机。
[0005]
为实现上述技术目的,本实用新型的技术方案是:一种可用触摸屏设定宽度的手提袋折叠机,包括机架、袋体折叠装置、把手折叠装置,其特征在于:所述的把手折叠装置包括滑台、左托板、右托板、导向板,所述的左托板和右托板滑动设置在所述的滑台上,在所述的左托板和右托板与滑台之间连接有组合气缸,所述组合气缸的每一工作位置分别由相应
的电磁阀控制,所述的电磁阀分别连接plc控制器,所述的plc控制器上连接有触摸屏。
[0006]
所述的组合气缸,包含多个工作位置,每一工作位置分别由相应的电磁阀控制;所述的电磁阀分别连接plc控制器,就是每一个电磁阀都分别连接到plc控制器的一个输出点上。当plc控制器的某一个或几个输出点打开或释放相应的电磁阀时,可使组合气缸中相应的工作位置的缸杆伸出或缩回,其运动行程会相应的增加或减小一定距离,是一种可以实现多个点循环的气缸。普通直线运动气缸只能在两点间进行运动循环,而组合气缸可以在三点、四点、五点之间进行循环,组合气缸可以实现运动件在多个位置停留。
[0007]
所述的组合气缸由多个直线运动气缸串联组合而成,每个直线运动气缸分别用气管与所述的电磁阀连接。每一个直线运动气缸就是所述的一个工作位置,所述的直线运动气缸包括双杆气缸、滑台气缸、导杆气缸、普通的伸缩气缸等等。
[0008]
作为组合气缸的多种实施方案之一,所述的组合气缸由多个(普通)气缸、直线导轨、滑块构成,多个滑块滑动设置在直线导轨上,气缸的气缸杆和尾部分别连接在滑块上。当气缸推动滑块时将该滑块上的气缸一起向前推进,该滑块上的气缸杆推动另一个滑块及气缸推进。
[0009]
作为优选的技术方案,所述的组合气缸设置两组,分别连接在左托板上和右托板上,两组组合气缸中相对应的工作位置的行程大体相同,气路相连,共用一个电磁阀。例如:一组组合气缸由a1、b1、c1构成,另一组由a2、b2、c2构成,那么气缸a1和气缸a2的行程是基本上相同的,用气管将a1、a2两个气缸连接起来,并且连接到一个电磁阀上。同样的,气缸b1和气缸b2,气缸c1和气缸c2也是如此连接。
[0010]
所述的在左托板和右托板与滑台之间连接有组合气缸,其实施方式有两种,一种是左托板与滑台之间安装一组组合气缸,右托板与滑台之间安装一组组合气缸;另一种方式是在左托板与右托板之间连接一组组合气缸,然后将组合气缸的连接到滑台上。
[0011]
所述的导向板设置在左托板和右托板对应的上方,当左托板也右托板之间的位置发生变化时,导向板也需要进行相应的调节。通常采取两种方式来调节:一种方式是配备多种规格的导向板,当变更手提袋的宽度时就更换一个与之相应的导向板;另一种方式是将梯形的导向板前后纵向分为两个三角形的板状体,将两个板状体滑动设置在导轨上,然后采用正反丝丝杠来调整。因为导向板处在机架的上部位置,并且结构简单,更换或者手动调节时相对方便,所以,在本实用新型的技术方案中在导向板上设置组合气缸并不属于必要技术特征。
[0012]
作为优选的技术方案,所述的导向板由两个类似于三角形的板状体构成,分为左导向板和右导向板,左导向板和右导向板滑动设置在导轨上,在左导向板和右导向板上连接有组合气缸。在组合气缸的驱动下左托板和右托板相对移动时,连接到左导向板和右导向板上的组合气缸也相应的打开,驱动左导向板和右导向板随左托板和右托板相应的移动。这种设计可以免去导向板的人工更换或调节,使得宽度调节的自动化程度更进了一步。
[0013]
作为优选的技术方案,所述的组合气缸设置四组,分别连接在左导向板和右导向板上,以及左托板和右托板上,四组组合气缸中相对应的每一工作位置的行程大体相同,气路相连,共用一个电磁阀。这种设计可以在很大程度上简化控制程序,使得气路简单,节约电磁阀和安装空间
[0014]
所述的plc控制器和触摸屏在本领域属于公知技术,通过在触摸屏上设定运动程
序然后再由plc来控制组合气缸相应的工作位置打开或释放,从而驱动所述的左托板和右托板移动到某一位置,这是本领域技术人员无需创造性的劳动即可实施的。所述的plc的替代方式较多,包括单片机等。
[0015]
所述的手提袋折叠机包括单通道和双通道两种。在单通道手提袋折叠机上设置一个左托板,一个右托板,一个左导向板,一个右导向板,通过调整左右两个托袋板的相对位置,以及两个导向板的相对位置,就可适应不同宽度手提袋的折叠,可以一次折叠一摞手提袋。
[0016]
作为优选的技术方案,所述的左托板和右托板分别设置两个,将两个左托板和两个右托板分别用连杆连接,在左托板与滑台之间,以及右托板与滑台之间分别连接组合气缸;同样的,设置两个左导向板,两个右导向板,将两个左导向板用连杆连接,再将右导向板用连杆连接,然后在左导向板和右导向板上分别连接组合气缸。这样就可以实现对双通道手提袋折叠机的宽度调节,这种双通道折叠机可以一次同时折叠两摞手提袋,并且一次设定就可以对两摞手提袋的宽度同时进行调节;并且是在不增加组合气缸的条件下实现对双通道手提袋折叠机的宽度调节。
[0017]
所述的触摸屏上可以设置一些与手提袋宽度相对应的数字或图标,也可以直接输入与手提袋的宽度相应的数字。当触摸或输入相应的数字或文字或图标时,plc会控制电磁阀使一个或几个气缸的缸杆伸出或缩回,从而驱动所述的左托板和右托板运动后停留在预定的与手提袋的宽度相适应的位置。例如:组合气缸由3个气缸构成,其行程分别为:气缸a的行程10厘米,气缸b的行程20厘米,气缸c的行程30厘米。每组组合气缸气缸分别驱动左托板和右托板,通过控制这3个气缸的打开货释放可获得:a=10、b=20、c=30、a+c=40、b+c=50、a+b+c=60,共6个行程。假定手提袋折叠机的折叠范围是20厘米至60厘米。初始状态下,左托板和右托板之间的位置的相对距离是20厘米,当需要折叠宽度为40厘米的手提袋时,就按动触摸屏上的数字40,这时plc便经过电磁阀a使两组组合气缸的气缸a打开,在气缸a的驱动下,每组气缸分别驱动左托袋板和右托板向两侧移动了10厘米,左托板和右托板移动的距离加在一起就是20厘米,对称移动,这样就可以对宽度是40厘米的手提袋进行折叠。如果需要折叠60厘米的手提袋时就按动一下触摸屏上的数字60,这时plc就会使气缸b打开,将气缸a释放,因为气缸b的行程是20厘米,这样一来左托板和右托板的相对移动的距离是40厘米,再加上初始位置的20厘米,这样左托板和右托板的相对距离就变成了60厘米,这样就可以对60厘米宽度的手提袋进行折叠。假如说组合气缸由a、b、c、d四个气缸构成,假如a的行程是5,b的行程是10,c的行程是20,d的行程是30,那么就可以实现:a=5、b=10、ab=15、c=20、ac=25、d=30、ad=35、bc=40、abc=45、cd=50、acd=55、abcd=60,共12个工作位置。这对于手提袋的宽度调节来说,12个级别的调整范围就算是细分了,能够满足其宽度调节的要求。
[0018]
本实用新型的有益效果是:只需在现有的手提袋折叠机的左托板和右托板上设置组合气缸,然后经过相应的电磁阀连接到plc控制器和触摸屏上,就可对多种宽度规格的手提袋在触摸屏上进行设定。结构简单,成本低廉,实现了数字化控制。
附图说明
[0019]
图1是实施例一的结构原理俯视示意图;
[0020]
图2是实施例一的结构原理侧视示意图;
[0021]
图3是实施例一的控制原理示意图;
[0022]
图4是实施例二的多位置气缸的结构原理示意图。
[0023]
图中:1
--
机架;2
--
导杆气缸;21
--
气缸a;22
--
气缸b;23
--
气缸c;24
--
滑块;25
--
滑块;26
--
连接块;27
--
连接块;28
--
直线导轨;29
--
连杆;3
--
托板导轨;31
--
左托板;32
--
右托板;33
--
托板滑块;34
--
定位部件;35
--
折叠组件;36
--
滑台气缸;37
--
滑台;38
--
前翻板;4
--
双杆气缸;41
--
左导向板;42
--
右导向板;43
--
横梁;44
--
升降气缸;45
--
导向板气缸;46
--
支架;47
--
导轨;48
--
滑块。
具体实施方式
[0024]
实施例一,如图1、图2所示:在机架的后部(图1的右侧)安装袋体折叠装置,袋体折叠装置主要包括后翻板、插板机构(略)等,袋体折叠装置和把手折叠装置属于现有技术,在对比文件1、对比文件3中已经公开,可参考授权公告号cn208361526,或cn208867634u实用新型或者授权公告号cn103318698b的发明专利,在此不再赘述。在机架1的前部滑动安装一个滑台37,在滑台的前部与机架1之间连接一个滑台气缸36,当滑台气缸36工作时可驱动滑台37沿导轨在机架1的前部进行往复直线运动;所述的把手折叠装置包括左托板31、右托板32、托板导轨3、托板滑块33、折叠组件35、左导向板41、右导向板42、前翻板38、定位部件34等。在滑台37的上面左右横向安装两条托板导轨3(也可以采用圆轴),在两条托板导轨3上左右安装两个托板滑块33(或直线轴承)33;设置两组组合气缸,组合气缸由导杆气缸2构成,每三个导杆气缸2为一组,其中一组的导杆气缸2分别是导杆气缸a1、导杆气缸b1、导杆气缸c1,另一组的组合气缸分别为导杆气缸a2、b2、c2。将导杆气缸a1的尾端连接到导杆气缸b1的导杆座上,再将导杆气缸b1的尾端连接到导杆气缸c的导杆座上,然后再将导杆气缸c的尾端连接到左托板31对应的连杆22上,将导杆气缸a1的导杆座连接到滑台37上;将另一组的导杆气缸a2的导杆座连接在滑台37上,将导杆气缸a2的尾端连接到导杆气缸b2的导杆座上,将导杆气缸c2的尾端连接到导杆气缸b2的导杆座上,然后将导杆气缸c2的导杆座连接到右托板32对应的连杆22上。两组导杆气缸2(即组合气缸)的行程分别为:导杆气缸a1和a2的行程相同都是10厘米;导杆气缸b1和b2的行程相同都是20厘米;导杆气缸c1和c2的行程相同都是30厘米。如图2所示:分别用气管将导杆气缸a1和a2连接在一起然后再连接到电磁阀a上(如图3所示);将导杆气缸b1和b2连接到电磁阀b上;将导杆气缸c1和c2连接在一起然后再连接到电磁阀b上,这种连接方式就是所述的:两组组合气缸中相对应的工作位置的行程大体相同,气路相连,共用一个电磁阀(a1和a2连接电磁阀a;b1和b2连接电磁阀b;ci和c2连接电磁阀c)。如图1所示:在机架1的后部滑动安装一条横梁43,在横梁43的中间位置上下安装一条升降气缸44,在气缸44的左右两侧分别滑动安装两个导杆,在两个导杆的下端和升降气缸44的气缸杆上安装支架46,在支架46上左右安装一条导轨47,在导轨47上滑动安装两个滑块48,在两个滑块48上分别安装左导向板41、右导向板42,所述的左导向板41和右导向板42是一种类似于三角形的板状体,左导向板41和右导向板41之间形成的外部轮廓与左托板31后部和右托板32的后部之间形成的空间上下对应;在左导向板41和右导向板42上分别连接一组组合气缸,两组组合气缸由3个双杆气缸4构成;一组是由a3,b3、c3三个双杆气缸组成,另一组是由a4、b4、c4三个双杆气缸构成(如图2图3所示)。其中,a3和a4的行程
相同都是10里面;b3和b4的行程相同都是20厘米;c3和c4的行程相同都是30厘米。然后用气管将双杆气缸a3与a1连接;b3与b1连接;c3与c1连接;c4与c2连接;b4与b2连接;a4与a2连接。这就是所述的:四组组合气缸中相应的工作位置的行程大体相同,气路相连,共用一个电磁阀。然后将3个电磁阀a、b、c分别连接到plc控制器的输出端;然后再将plc控制器与触摸屏连接。
[0025]
实施例一的控制原理如下:假如说初始状态下手提袋的最小宽度是20厘米,左托板31和右托板32的距离为20里面,这种情况下只能对最窄的宽度为20厘米的手提袋进行折叠。假定说需要折叠的手提袋的宽度为40厘米,首先按动触摸屏上的宽度调节数字40,或者说在触摸屏上输入一个数字40,plc控制器的控制端就会使电磁阀a打开,使导杆气缸a1、a2以及双杆气缸a3、a4都打开,气缸杆都伸出10厘米,这样一来就将左托板31和左导向板41在a1和a3的驱动下都向左移动了10厘米,另一组导杆气缸的a4和a2也将驱动右托板32和右导向板42向右移动10厘米,左托板31和右托板32以及左导向板41和右导向板42向两侧移动的距离是20厘米,并且能够保持左托板32和右托板32之间的中心点不变,形成对称移动,这样就可以折叠40厘米宽度的手提袋。假如需要折叠宽度为120厘米宽度的手提袋,就按动触摸屏上的宽度调节数字120,触摸屏的通讯信号就会使plc控制器关掉控制电磁阀a的输出点,接通电磁阀b和电磁阀c,使气缸b1、b2、b3、b4以及c1、c2、c3、c4都打开,因为b1加c1的行程是20+30=50厘米,左托板31.右托板32、左导向板41、右导向板42向两侧移动的距离就是50+50=100厘米,再加上初始位置的20厘米就是120厘米,这样就可以对120厘米宽度的手提袋进行折叠。如果手提袋的宽度范围较大,可以采用增加组合气缸的气缸数量的方式解决,例如再增加导杆气缸d、e、f等。
[0026]
实施例二,实施例二与实施一的不同之处在于:如图4所示:组合气缸主要由3个普通的气缸21、气缸22、气缸23(即气缸a、气缸b、气缸c),以及直线导轨28和滑块24、滑块25构成。如图4所示:在机架1上安装一条直线导轨28,在直线导轨28上滑动安装滑块24、滑块25,将气缸23的尾部连接在机架1上,气缸杆连接在连接块27上,连接块27安装在滑块25上;在连接块27的另一侧连接气缸22即气缸b的尾端,气缸杆连接在连接块26上,连接块26的另一侧连接气缸21的尾端,气缸21的气缸杆与连杆22连接。
[0027]
实施例二的具体工作过程是:假定手提袋的宽度是60厘米,气缸23的行程是20厘米,气缸22的行程是10厘米。那么只需打开气缸23和气缸22就可驱动左托板31向外移动30厘米,同样的,另一组多位置气缸也会驱动右托板向相反的方向移动30厘米,加上初始距离的20厘米,这样一来左托板和右托板的距离就会变为80厘米,就可以对宽度80厘米的手提袋进行折叠。具体设定时,可在触摸屏上输入手提袋的宽度数字80,plc控制器的两个输出点就会使电磁阀c和电磁阀b通电打开,从而控制气缸23和气缸22都打开。当气缸23打开后,其气缸杆会推动连接块27和连接块26、滑块24和滑块25、气缸22和气缸21一起沿直线导轨28经过连杆29和滑块33将左托板31向左推移15厘米(因为气缸23的行程是15厘米);与此同时,气缸b也打开,其气缸杆推动连接块26和滑块24、气缸21一起相对于连接块27又将左托板31向左移动了5厘米,至此,左托板31总计向左位移了20厘米;另一侧的多位置气缸也同样将右托板向右推移了30厘米(略),这样一来左托板和右托板之间相对移动了60厘米,再加初始距离的20厘米就是80厘米,就可以对宽度80厘米的手提袋进行折叠。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips