
 商标分类
商标分类  商标转让
商标转让 
一种球型水果自动套网机的制作方法
 2021-02-19 14:02:53|
2021-02-19 14:02:53| 409|
409| 起点商标网
起点商标网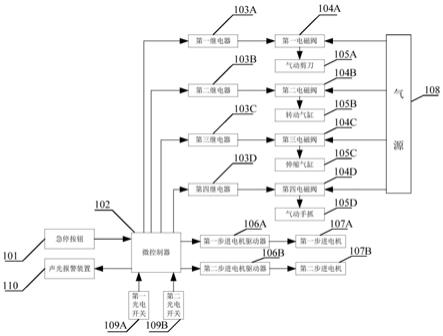
:
[0001]
本发明涉及一种球型水果自动套网机,属于农用机械领域。
背景技术:
[0002]
水果套网可实现水果的防护,降低水果在运输、储藏过程中的破损率,但当前市面上水果自动套网机器具有体积大、结构复杂和成本高的缺点,虽可提升水果包装的效率,但对于用户而言设备的运行成本以及后期维护成本过高。因此,人工套网仍是当下水果套网的主要方式。人工套网效率低,不定因素多。一定程度上阻碍了成品水果的大规模生产,无法顺应我国当前水果行业的发展趋势,不利于水果行业的发展。
技术实现要素:
:
[0003]
本发明是为了解决现有水果套网机体积大、结构复杂、成本高,且人工套网效率低的问题,提出一款便于推广的球型水果自动套网机。
[0004]
本发明所述的一种球型水果自动套网机,它包括急停按钮(101)、微控制器 (102)、第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d)、第一电磁阀(104a)、第二电磁阀(104b)、第三电磁阀(104c)、第四电磁阀(104d)、气动剪刀(105a)、转动气缸(105b)、伸缩气缸(105c)、气动手爪(105d)、第一步进电机驱动器(106a)、第二步进电机驱动器(106b)、第一步进电机(107a)、第二步进电机(107b)、气源(108)、第一光电开关(109a)、第二光电开关(109b)、声光报警装置(110)、气缸支架(201)、气缸转接件(202)、第一托杯(301a)、第二托杯(301b)、第三托杯(301c)、第一托杯支架(302a)、第二托杯支架(302b)、第三托杯支架(302c)、转盘(303)、平键(304)、交叉滚子轴承(305)、步进电机支架(306)、光电开关固定架(307)和传送带(308)。
[0005]
所属急停按钮(101)输出端和第一光电开关(109a)、第二光电开关(109b) 输出端均与微控制器(102)输入端连接。所述微控制器(102)输出端分别与第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d) 输入端、第一步进电机驱动器(106a)、第二步进电机驱动器(106b)输入端和声光报警装置(110)输入端连接,所述第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d)输出端分别与第一电磁阀(104a)、第二电磁阀(104b)、第三电磁阀(104c)、第四电磁阀(104d)线圈连接。所述气源(108)输出端与第一电磁阀(104a)、第二电磁阀(104b)、第三电磁阀(104c)、第四电磁阀(104d)输入端连接,所述第一电磁阀(104a)输出端与气动剪刀(105a) 输入端连接。所述第二电磁阀(104b)输出端与转动气缸(105b)输入端连接。所述第三电磁阀(104c)输出端与伸缩气缸(105c)输入端连接。所述第四电磁阀(104d)输出端与气动手爪(105d)输入端连接。所述第一步进电机驱动器(106a)、第二步进电机驱动器(106b)输出端分别与第一步进电机(107a)、第二步进电机(107b)输入端连接。
[0006]
所述气缸支架(201)通过螺栓与气动剪刀(105a)外壳连接,所述气动剪刀(105a)外壳通过螺栓与转动气缸(105b)连接,所述转动气缸(105b)通过螺栓与气缸转接件(202)
一端连接,所述气缸转接件(202)另一端通过螺栓与伸缩气缸(105c)缸体连接,所述伸缩气缸(105c)活塞杆通过螺栓与气动手爪 (105d)外壳连接。
[0007]
所述第一托杯(301a)、第二托杯(301b)、第三托杯(301c)通过螺栓分别与第一托杯支架(302a)、第二托杯支架(302b)、第三托杯支架(302c)一端连接,所述第一托杯支架(302a)、第二托杯支架(302b)、第三托杯支架(302c) 另一端通过螺栓与转盘(303)连接。所述转盘(303)通过螺栓与交叉滚子轴承 (305)内圈连接,所述交叉滚子轴承(305)外圈通过螺栓与步进电机支架(306) 连接。所述步进电机支架(306)通过螺栓与第一步进电机(107a)外壳连接。所述第一步进电机(107a)输出轴通过平键(304)与转盘(303)连接。
[0008]
所述第一光电开关(109a)通过自身螺纹与步进电机支架(306)连接。
[0009]
所述转盘(303)上开有通孔,配合第一光电开关(109a)实现转盘转动位置定位,实现第一托杯(301a)、第二托杯(301b)、第三托杯(301c)转动位置定位,便于水果套网。
[0010]
所述第二光电开关(109b)通过自身螺纹与光电开关固定架(307)一端连接,光电开关固定架(307)另一端通过螺栓与步进电机支架(306)连接。
[0011]
所述急停按钮(101)和声光报警装置(110)通过螺栓与气缸支架(201) 连接。
[0012]
所述第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d)均为双路触点继电器,一路常开触点、一路常闭触点。
[0013]
所述气动手爪(105d)具有三个手指。
[0014]
所述第一托杯(301a)、第二托杯(301b)、第三托杯(301c)开设三个矩形槽,便于气动手爪(105d)动作。
[0015]
所述第二光电开关(109b)用于检测第一托杯(301a)、第二托杯(301b)、第三托杯(301c)中是否具有预套网水果,避免误操作。
[0016]
所述传送带(308)用于将水果输送至第一托杯(301a)、第二托杯(301b)、第三托杯(301c)中。
[0017]
本发明的优点:本发明可实现球形水果的自动套网,设备具有体积小、重量轻、成本低、维护方便、操作简单、包装效率高和便于推广的特点。同时,该套网机适用水果类型多,实现一机多用。
附图说明:
[0018]
图1自动套网机控制原理框图
[0019]
图2自动套网机结构原理图
[0020]
图3托杯转盘局部图
[0021]
图4平键断面图
具体实施方式:
[0022]
具体实施方式:下面结合图1、图2和图3说明水果自动套网机工作过程。本发明所述一种水果自动套网机,它包括急停按钮(101)、微控制器(102)、第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d)、第一电磁阀(104a)、第二电磁阀(104b)、第三电磁阀(104c)、第四电磁阀(104d)、气动剪刀(105a)、转动气缸(105b)、伸缩气缸(105c)、气动手爪(105d)、第一步进电机驱动器(106a)、第二步进电机驱动器(106b)、第
一步进电机(107a)、第二步进电机(107b)、气源(108)、第一光电开关(109a)、第二光电开关(109b)、声光报警装置(110)、气缸支架(201)、气缸转接件(202)、第一托杯(301a)、第二托杯(301b)、第三托杯(301c)、第一托杯支架(302a)、第二托杯支架(302b)、第三托杯支架(302c)、转盘(303)、平键(304)、交叉滚子轴承(305)、步进电机支架(306)、光电开关固定架(307)和传送带(308)。
[0023]
所属急停按钮(101)输出端和第一光电开关(109a)、第二光电开关(109b) 输出端均与微控制器(102)输入端连接。所述微控制器(102)输出端分别与第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d) 输入端、第一步进电机驱动器(106a)、第二步进电机驱动器(106b)输入端和声光报警装置(110)输入端连接,第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d)输出端与第一电磁阀(104a)、第二电磁阀(104b)、第三电磁阀(104c)、第四电磁阀(104d)线圈连接。所述气源(108) 输出端与第一电磁阀(104a)、第二电磁阀(104b)、第三电磁阀(104c)、第四电磁阀(104d)输入端连接,所述第一电磁阀(104a)输出端与气动剪刀(105a) 输入端连接。所述第二电磁阀(104b)输出端与转动气缸(105b)输入端连接。所述第三电磁阀(104c)输出端与伸缩气缸(105c)输入端连接。所述第四电磁阀(104d)输出端与气动手爪(105d)输入端连接。所述第一步进电机驱动器(106a)、第二步进电机驱动器(106b)输出端分别与第一步进电机(107a)、第二步进电机(107b)输入端连接。
[0024]
所述气缸支架(201)通过螺栓与气动剪刀(105a)外壳连接,所述气动剪刀(105a)外壳通过螺栓与转动气缸(105b)连接,所述转动气缸(105b)通过螺栓与气缸转接件(202)一端连接,所述气缸转接件(202)另一端通过螺栓与伸缩气缸(105c)缸体连接,所述伸缩气缸(105c)活塞杆通过螺栓与气动手爪 (105d)外壳连接。
[0025]
所述第一托杯(301a)、第二托杯(301b)、第三托杯(301c)通过螺栓分别与第一托杯支架(302a)、第二托杯支架(302b)、第三托杯支架(302c)一端连接,所述第一托杯支架(302a)、第二托杯支架(302b)、第三托杯支架(302c) 另一端通过螺栓与转盘(303)连接。所述转盘(303)通过螺栓与交叉滚子轴承 (305)内圈连接,所述交叉滚子轴承(305)外圈通过螺栓与步进电机支架(306) 连接。所述步进电机支架(306)通过螺栓与第一步进电机(107a)外壳连接。所述第一步进电机(107a)输出轴通过平键(304)与转盘(303)连接。
[0026]
所述第一光电开关(109a)通过自身螺纹与步进电机支架(306)连接。
[0027]
所述转盘(303)上开有通孔,配合第一光电开关(109a)实现转盘转动位置定位,实现第一托杯(301a)、第二托杯(301b)、第三托杯(301c)转动位置定位,便于水果套网。
[0028]
所述第二光电开关(109b)通过自身螺纹与光电开关固定架(307)一端连接,光电开关固定架(307)另一端通过螺栓与步进电机支架(306)连接。
[0029]
所述急停按钮(101)和声光报警装置(110)通过螺栓与气缸支架(201) 连接。
[0030]
所述第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d)均为双路触点继电器,一路常开触点、一路常闭触点。
[0031]
所述气动手爪(105d)具有三个手指。
[0032]
所述第一托杯(301a)、第二托杯(301b)、第三托杯(301c)开设三个矩形槽,便于气动手爪(105d)动作。
[0033]
所述第二光电开关(109b)用于检测第一托杯(301a)、第二托杯(301b)、第三托杯
(301c)中是否具有预套网水果,避免误操作。
[0034]
所述传送带(308)用于将水果输送至第一托杯(301a)、第二托杯(301b)、第三托杯(301c)中。
[0035]
初始时刻,第一继电器(103a)、第二继电器(103b)、第三继电器(103c)、第四继电器(103d)线圈断开,常开触点断开、常闭触点闭合,分别控制第一电磁阀(104a)、第二电磁阀(104b)、第三电磁阀(104c)、第四电磁阀(104d) 线圈得电,控制气动剪刀(105a)张开,转动气缸(105b)带动气动手爪(105d) 在托杯运动轨迹线正上方,伸缩气缸(105c)缩回。
[0036]
套网时,微控制器(102)通过第二步进电机驱动器(106b)驱动第二步进电机(107b)带动传送带(308)动作,将水果传送至第一托杯(301a),第二光电开关(109b)检测第一托杯(301a)有水果时发出信号,微控制器(102)接收第二光电开关(109b)信号后,通过第二步进电机驱动器(106b)控制第二步进电机(107b)停止转动。通过第一步进电机驱动器(106a)驱动第一步进电机 (107a)转动,第一托杯(301a)转动至气动手抓(105d)正下方位置。第一光电开关(109a)发出信号,微控制器(102)接收第一光电开关(109a)信号后, 微控制器(102)发出信号控制第三继电器(103c)线圈闭合,第三电磁阀(104c) 阀芯动作,伸缩气缸(105c)伸出。待一定时间后,微控制器(102)发出信号控制第四继电器(103d)线圈闭合,第四电磁阀(104d)阀芯动作,气动手抓(105d) 闭合,实现水果套网。待一定时间后,微控制器(102)发出信号控制第三继电器(103c)线圈断开,第三电磁阀(104c)阀芯动作,伸缩气缸(105c)缩回。待一定时间后,微控制器(102)发出信号控制第一继电器(103a)线圈闭合,第一电磁阀(104a)阀芯动作,气动剪刀(105a)闭合,剪开套网。待一定时间后,微控制器(102)发出信号控制第一继电器(103a)线圈断开,第一电磁阀 (104a)阀芯动作,气动剪刀(105a)张开。待一定时间后,微控制器(102) 发出信号控制第二继电器(103b)线圈闭合,第二电磁阀(104b)阀芯动作,转动气缸(105b)转动,将套网水果转至期望位置。待一定时间后,微控制器(102) 发出信号控制第四继电器(103d)线圈断开,第四电磁阀(104d)阀芯动作,气动手抓(105d)张开,将套网水果放置期望位置。待一定时间后,微控制器(102) 发出信号控制第二继电器(103b)线圈断开,第二电磁阀(104b)阀芯动作,转动气缸(105b)复位,继续套网动作。
[0037]
本发明运行包括如下工况:
[0038]
工况一:套网机正常套网时,微控制器(102)通过第二步进电机驱动器(106b) 驱动第二步进电机(107b)带动传送带(308)动作,将水果传送至第一托杯(301a),第二光电开关(109b)检测第一托杯(301a)有水果时发出信号,微控制器(102) 接收第二光电开关(109b)信号后,通过第二步进电机驱动器(106b)控制第二步进电机(107b)停止转动。通过第一步进电机驱动器(106a)驱动第一步进电机(107a)转动,第一托杯(301a)转动至气动手抓(105d)正下方位置。第一光电开关(109a)发出信号,微控制器(102)接收第一光电开关(109a)信号后,微控制器(102)发出信号控制第三继电器(103c)线圈闭合,第三电磁阀(104c) 阀芯动作,伸缩气缸(105c)伸出。待一定时间后,微控制器(102)发出信号控制第四继电器(103d)线圈闭合,第四电磁阀(104d)阀芯动作,气动手抓(105d) 闭合,实现水果套网。待一定时间后,微控制器(102)发出信号控制第三继电器(103c)线圈断开,第三电磁阀(104c)阀芯动作,伸缩气缸(105c)缩回。待一定时间后,微控制器(102)发出信号控制第一继电器(103a)线圈闭合,第一电磁阀(104a)阀芯动作,气动剪刀(105a)闭合,剪开套网。待
一定时间后,微控制器(102)发出信号控制第一继电器(103a)线圈断开,第一电磁阀 (104a)阀芯动作,气动剪刀(105a)张开。待一定时间后,微控制器(102) 发出信号控制第二继电器(103b)线圈闭合,第二电磁阀(104b)阀芯动作,转动气缸(105b)转动,将套网水果转至期望位置。待一定时间后,微控制器(102) 发出信号控制第四继电器(103d)线圈断开,第四电磁阀(104d)阀芯动作,气动手抓(105d)张开,将套网水果放置期望位置。待一定时间后,微控制器(102) 发出信号控制第二继电器(103b)线圈断开,第二电磁阀(104b)阀芯动作,转动气缸(105b)复位,继续套网动作。
[0039]
工况二:预套网第一托杯(301a)定位出现偏差时,第一光电开关(109a) 发出信号,微控制器(102)控制声光报警装置(110)发出报警信号。
[0040]
工况三:突发情况需停机时,按下急停按钮(110),微控制器(102)接收信号后控制声光报警装置(110)发出报警信号。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips