
 商标分类
商标分类  商标转让
商标转让 
分类转运垃圾中转站的制作方法
 2021-02-19 13:02:52|
2021-02-19 13:02:52| 303|
303| 起点商标网
起点商标网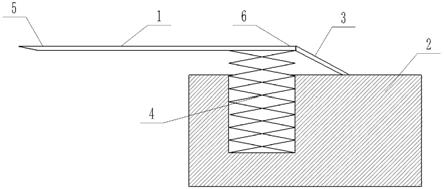
[0001]
本实用新型涉及垃圾运输储藏的技术领域,特别涉及分类转运垃圾中转站。
背景技术:
[0002]
垃圾转运站是为了减少垃圾清运过程的运输费用而在垃圾产地(或集中地点) 至垃圾处理厂之间所设置的垃圾中转站。最初的垃圾中转站包括垃圾存放坑和升降台,垃圾运输到垃圾中转站倾倒进垃圾存放坑暂时存放,在需要转运时,由升降台将垃圾存放坑中的垃圾顶上来,便于搬运。这种将垃圾混合统一处理的方式,存在很多问题:1.垃圾中的易腐败垃圾,造成污水和异味,滋生蚊蝇,影响环境。2.可回收垃圾和不可回收垃圾混合,需要清洁员从众多垃圾中筛找,垃圾中的致病原影响清洁员的健康,且降低了垃圾的回收率;3.有毒垃圾随着污水流入土壤中污染水源和侵蚀土壤。
[0003]
为了解决上述问题,当前的垃圾中转站设置有垃圾储存室和装卸平台,装卸平台便于垃圾箱直接从转运车车斗和装卸平台之间转运,垃圾储存室设置有隔离的单间能对垃圾进行分类存储,从而便于垃圾分类回收处理。
[0004]
转运车车斗所装载的垃圾重量变化,会导致转运车车斗距离地面高度的变化。因此,通过上述方案存在装载不同重量垃圾的转运车车斗与装卸平台不在一个高度,引起转运垃圾箱时,存在装卸平台与转运车车斗之间的坡或坎,不便于垃圾箱转运。
技术实现要素:
[0005]
为解决转运车车斗所装载的垃圾重量变化,导致装卸平台与转运车车斗之间存在坡或坎,不便于垃圾箱在转运车车斗与装卸平台之间转运的技术问题,本实用新型提供分类转运垃圾中转站。
[0006]
本实用新型基础方案为:分类转运垃圾中转站,包括装卸平台,装卸平台包括位置检测机构和调整机构,其中:
[0007]
装卸平台上设置有载物板,载物板的一号端伸出装卸平台;
[0008]
调整机构用于调整载物板的位置;
[0009]
位置检测机构用于检测转运车车斗的位置。
[0010]
有益效果:本方案中载物板连接装卸平台与转运车车斗,相较于转运车车斗与装卸平台靠在一起的方式,使得垃圾箱转运的路径更加稳固,且平稳。另外,本方案中位置检测机构检测转运车车斗的位置,当转运车车斗的高度与载物板的高度不匹配时,通过调整机构可以调整载物板的位置,让载物板与转运车车斗对准,从而可以弱化装卸平台与转运车车斗之间存在坡或坎,便于垃圾箱在转运车车斗与装卸平台之间转运。
[0011]
避免方便垃圾向从转运车车斗转运到装卸平台。
[0012]
进一步,载物板伸出装卸平台的一号端的末端设置有倾角。
[0013]
有益效果:使得载物板更容易沿着转运车车斗的边缘滑进转运车车斗。
[0014]
进一步,调整机构包括升降台和电机,载物板对应的装卸平台设置有空腔,升降台
设置在空腔内,升降台的底部与空腔内壁固定连接,升降台的顶部与载物板固定连接,载物板的一号端的末端铰接有滑板。
[0015]
有益效果:实现载物板上下移动,并且滑板作为载物板与装卸平台的过渡连接,便于垃圾箱平稳的从载物板上移动到装卸平台上。
[0016]
进一步,载物板的二号端的末端与装卸平台转动连接,调整机构包括离心轮和电机,离心轮与电机电连接,载物板下方的装载平台设有空腔,离心轮与空腔内壁固定连接。
[0017]
有益效果:实现载物板上下摆动。
[0018]
进一步,位置检测机构包括一号激光位置传感器和二号激光位置传感器,一号激光位置传感器和二号激光位置传感器分别固定在载物板一号端的上下面。
[0019]
有益效果:通过检测转运车车斗在否在一号激光位置传感器和二号激光位置传感器的检测范围可以得到载物板位于转运车车斗的上方还是下方,还是对齐。
[0020]
进一步,一号激光位置传感器和二号激光位置传感器的检测范围均为0.5 到6厘米。
[0021]
有益效果:在不影响检测距离的前提下,降低激光位置传感器的检测距离长度,从而降低成本。
[0022]
进一步、包括一号按键和二号按键,一号按键控制调整机构向上调整载物板,二号按键控制调整机构向下调整载物板。
[0023]
有益效果:通过按键方便控制调整机构调整载物板。
[0024]
进一步、包括一号警示灯和二号警示灯,一号警示灯与一号激光位置传感器电连接,一号警示灯与二号激光位置传感器电连接,一号激光位置传感器检测到位置信号时,一号警示灯亮,二号激光位置传感器检测到位置信号时,二号警示灯亮。
[0025]
有益效果:便于警示该通过调整机构向上或者向下调整载物板。
[0026]
进一步,一号警示灯设置在一号按键上,二号警示灯设置在二号按键上。
[0027]
有益效果:直接根据灯光按按键,更加直观,避免按错按键。
[0028]
进一步,还包括控制器,控制器的输入端与一号激光位置传感器和二号激光位置信号连接,控制器的输出端与电机控制连接。
[0029]
有益效果:实现自动控制调整机构调整载物板的位置。
附图说明
[0030]
图1为分类转运垃圾中转站实施例一的示意图;
[0031]
图2为分类转运垃圾中转站实施例一的局部示意图;
[0032]
图3为分类转运垃圾中转站实施例二的示意图。
具体实施方式
[0033]
下面通过具体实施方式进一步详细说明:
[0034]
说明书附图中的附图标记包括:载物板1、装卸平台2、滑板3、升降台4、一号端5、二号端6、离心轮7。
[0035]
实施例一
[0036]
分类转运垃圾中转站,如图1所示,包括装卸平台2,装卸平台2包括位置检测机构
和调整机构,其中:装卸平台上设置有载物板1,载物板1的一号端5 伸出装卸平台2,载物板1的一号端5的末端设置有倾角;调整机构用于调整载物板1的位置,调整机构包括升降台4和电机,载物板1对应的装卸平台2设置有空腔,升降台4设置在空腔内,升降台4的底部与空腔内壁螺栓连接,升降台 4的顶部与载物板1螺栓固定,载物板1的一号端5的末端铰接有滑板3,滑板 3随着载物板1的位置变化改变与装卸平台2的倾角,起到载物板1与装卸平台 2的过渡连接。
[0037]
如图2所示,位置检测机构用于检测转运车车斗的位置,位置检测机构包括一号激光位置传感器和二号激光位置传感器,一号激光位置传感器和二号激光位置传感器分别焊接在载物板1伸出装卸平台的一端的上下面,且靠边缘位置,一号激光位置传感器和二号激光位置传感器的检测范围均为0.5到6厘米,本实施例中激光位置传感器采用的是型号为lr-zb100cp激光位置传感器。
[0038]
装卸平台还包括一号按键和二号按键,一号按键控制调整机构向上调整载物板,二号按键控制调整机构向下调整载物板。装卸平台还包括一号警示灯和二号警示灯,一号警示灯与一号激光位置传感器电连接,一号警示灯与二号激光位置传感器电连接,一号激光位置传感器检测到位置信号时,一号警示灯亮,二号激光位置传感器检测到位置信号时,二号警示灯亮。一号警示灯粘接在一号按键上,二号警示灯粘接在二号按键上,且一号按键和二号按键上均粘接有玻璃罩或者透明的塑料罩,防止一号警示灯和二号警示灯损坏。在其他实施例中,使用控制器控制调整机构,控制器的输入端与一号激光位置传感器和二号激光位置信号连接,控制器的输出端与电机控制连接。
[0039]
具体实施过程:
[0040]
转运车靠近装卸平台,此时,若转运车车斗处于载物板上方5厘米,一号激光位置传感器检测到位置信号,一号警示灯亮,清洁员按一号按键,电机驱动升降台向上伸展,载物板向上移动,直到转运车车斗距载物板小于0.5厘米,一号警示灯熄灭,清洁员松开一号按键。此时,载物板与转运车车斗达到对准范围。
[0041]
若采用控制器控制调整机构,实施过程为转运车靠近装卸平台,此时,若转运车车斗处于载物板上方5厘米,一号激光位置传感器检测到位置信号,控制器接收到一号激光位置传感器检测的位置信号,控制电机驱动升降台向上伸展,载物板向上移动,滑板在载物板的拖动下倾斜,直到转运车车斗距载物板小于0.5 厘米,控制器未接收到位置信号,停止对电机的控制。此时,载物板与转运车车斗达到对准范围。
[0042]
实施例二
[0043]
与实施例一的区别之处在于:如图3所示,载物板1的二号端6的末端与装卸平台2合页连接,调整机构包括离心轮7和电机,离心轮7与电机电连接,载物板1下方的装卸平台2设有空腔,离心轮7与空腔内壁螺栓固定。电机驱动离心轮转动,由于离心轮旋转过程对载物板顶出的距离不同,实现让载物板上下摆动。
[0044]
以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips