
 商标分类
商标分类  商标转让
商标转让 
一种可实现双模式驾驶的叉车三联液压控制系统的制作方法
 2021-02-19 00:02:47|
2021-02-19 00:02:47| 339|
339| 起点商标网
起点商标网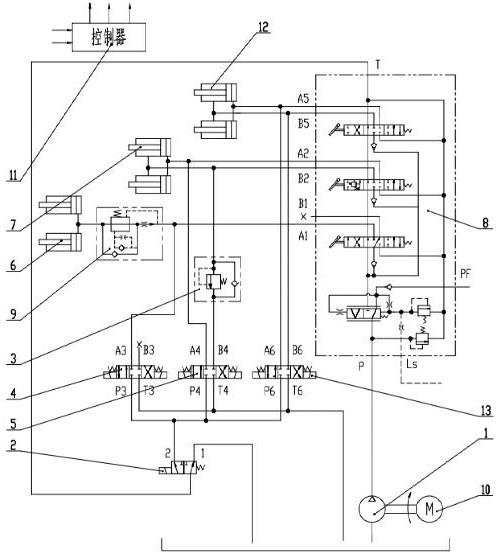
[0001]
本实用新型涉及一种电动叉车液压系统,具体是一种可实现双模式驾驶的叉车三联液压控制系统。
背景技术:
[0002]
电动平衡重叉车实现无人自动驾驶是一种趋势,可以提高生产率,现有人工驾驶模式的液压系统为传统的机械阀,无法使用控制器的电信号进行比例控制,考虑到全面切换电磁阀,成本增加太多,同时万一液压系统出现故障,自动驾驶的整车便无法行走,会降低生产效率。因此在自动驾驶模式的基础上,需要保留现有人工驾驶模式。
[0003]
中国专利公开了一种可实现自动驾驶和人工驾驶的叉车三联液压控制系统,选择阀第一油路连接多路阀,选择阀第二油路连接优先阀;优先阀出油口a分别连接第一电磁阀、第二电磁阀、第三电磁阀;第一电磁阀连接举升缸,第二电磁阀连接倾斜缸、第三电磁阀连接第三油缸;优先阀的pf口通过单向阀接多路阀的pf口;优先阀的ls口接多路阀的ls口;多路阀控制连接举升缸、倾斜缸、第三油缸;控制器与泵、选择阀、第一电磁阀、第二电磁阀、第三电磁阀电连接。该实用新型液压系统可以实现自动驾驶控制和人工驾驶控制,同时能具备自动驾驶的节能模式。上述技术存在的不足是:需要使用两个优先阀才能实现优先转向,油路复杂,控制不便。
技术实现要素:
[0004]
基于上述技术问题,本实用新型提供一种可实现双模式驾驶的叉车三联液压控制系统。
[0005]
本实用新型通过以下技术方案实现:一种可实现双模式驾驶的叉车三联液压控制系统,泵出油口连接有多路阀,多路阀分别连接有举升缸、倾斜缸和第三油缸;
[0006]
所述多路阀的回油口连接有选择阀;
[0007]
所述选择阀连接有第一电磁阀、第二电磁阀和第三电磁阀;
[0008]
所述第一电磁阀连接举升缸的进油口;
[0009]
所述第二电磁阀连接倾斜缸;
[0010]
所述第三电磁阀连接第三油缸。
[0011]
其进一步是:所述多路阀的a1口接举升缸的大腔,b1口用油堵进行封堵;多路阀的a2口接倾斜缸的大腔,b2口接倾斜缸的小腔;多路阀的a5口接第三油缸的大腔,b5口接第三油缸的小腔;多路阀的pf口接转向系统的进油口,ls口接转向系统的控制油口。
[0012]
所述选择阀的2口分别接第一电磁阀的p3口、第二电磁阀的p4口、第三电磁阀的p6口,选择阀的1口接油箱;
[0013]
所述第一电磁阀的a3口接举升缸的进油口,b3口用油堵进行封堵;所述第二电磁阀的a4口接倾斜缸的大腔进油口,b4口接倾斜缸的小腔进油口;所述第三电磁阀的a6口接第三油缸的大腔进油口,b6口接第三油缸的小腔进油口。
[0014]
所述第二电磁阀的b4口连接有平衡阀,平衡阀另一油口连接倾斜缸的小腔进油口。
[0015]
所述举升缸的大腔连接有缓速阀,缓速阀的进油口分别连接所述第一电磁阀的a3口、所述多路阀的a1口。
[0016]
所述泵与电机通过花键连接。
[0017]
控制器与泵电机、第一电磁阀、第二电磁阀、第三电磁阀和选择阀通过电路进行连接。
[0018]
与现有技术相比,本实用新型的有益效果是:
[0019]
1,选择阀连接在多路阀回油口,不影响原有的机械控制;自动驾驶的系统利用原有的多路阀中集成优先阀实现优先转向,简化了系统结构,更容易实现油路优先控制;
[0020]
2,平衡阀在叉车进行前倾动作时,保证叉车的平稳运行;缓速阀在货叉下降时,进行速度节流控制,下降平稳;
[0021]
3,当自动驾驶模式的液压系统出现故障时,选择阀可以实现自动断电,自动切换至人工驾驶的液压系统,驾驶员仍然可以正常操作叉车进行工作,或者驾驶到维修点进行定点维修,提升维修效率。
附图说明
[0022]
图1是本实用新型工作原理图;
[0023]
图中:1.泵;2.选择阀;3.平衡阀;4.第一电磁阀;5.第二电磁阀;6.举升缸;7.倾斜缸;8.多路阀;9.缓速阀;10.泵电机;11.控制器; 12.第三油缸;13.第三电磁阀。
具体实施方式
[0024]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0025]
结合图1所示,一种可实现双模式驾驶的叉车三联液压控制系统,泵1与电机10通过花键连接,泵1从油箱中吸油,泵1出油口连接多路阀8的p口;
[0026]
多路阀8的a1口接缓速阀9的进油口,缓速阀9的出油口接举升缸6的大腔,多路阀8的b1口用油堵进行封堵。多路阀8的a2口接倾斜缸7的大腔,多路阀8的b2口接倾斜缸7的小腔。多路阀8的a5口接第三油缸12的大腔,多路阀8的b5口接第三油缸12的小腔。多路阀8的pf口接转向系统的进油口,ls口接转向系统的控制油口。
[0027]
选择阀2进行自动驾驶和人工驾驶模式的切换。选择阀2的进油口接多路阀8的回油口t,选择阀的1口接油箱,选择阀2的2口分别接第一电磁阀4的p3口、第二电磁阀5的p4口、第三电磁阀13的p6口;
[0028]
第一电磁阀4的a3口接缓速阀9的进油口,b3口用油堵进行封堵;t3口接油箱进行回油。缓速阀对货叉的下降速度进行平稳控制,在货叉下降时,进行速度节流控制;
[0029]
第二电磁阀5的a4口接倾斜缸7的大腔进油口,b4口接平衡阀3进油口,平衡阀3出油口接倾斜缸7的小腔进油口;t4口接油箱进行回油。平衡阀主要控制整车进行在前倾动作
时,保证小腔回油具有一定的背压,确保前倾动作平稳运行;
[0030]
第三电磁阀13的a6口接第三油缸12的大腔进油口,b6口接第三油缸12的小腔进油口;t6口接油箱进行回油。
[0031]
进一步的:本实施例中的第三电磁阀13、第三油缸12可以去除,此时适用于叉车二联液压控制系统。
[0032]
控制器11与泵电机10、第一电磁阀4、第二电磁阀5、第三电磁阀13和选择阀2通过电路进行连接。第一电磁阀、第二电磁阀和第三电磁阀分别控制举升缸、倾斜缸和第三油缸,从而实现电动叉车的两种液压控制模式的集成。当自动驾驶模式的液压系统出现故障时,选择阀可以实现自动断电,自动切换至人工驾驶的液压系统,驾驶员仍然可以正常操作叉车进行工作,驾驶到维修点进行定点维修,提升维修效率。
[0033]
工作原理:
[0034]
泵出口经过多路阀,通过多路阀的回油口接选择阀,进行自动驾驶和人工驾驶模式的选择切换,而选择切换的电路信号由控制器进行控制;
[0035]
第一电磁阀采用o型机能,控制电动叉车的举升缸,当叉车举升时,控制器分别向泵电机、选择阀和第一电磁阀输出控制信号,泵电机带动泵进行运转,选择阀切换至自动驾驶模式,电磁阀得电后,阀芯右移,举升动作的油路接通,整车进行举升动作;
[0036]
当叉车货叉需要下降时,控制器分别向泵电机、选择阀和第一电磁阀输出控制信号,泵电机带动泵进行运转,选择阀切换至人工驾驶模式,电磁阀断电后,阀芯左移,举升缸下腔与回油油路接通,在重力作用下进行下降动作,而进油口不通,此时控制器控制泵电机进行低速运转,同时选择阀进行断电,主油路经过多路阀进行回油;即,货叉下降时,泵通过多路阀进行卸荷。
[0037]
第二电磁阀控制倾斜缸进行前倾或者后倾,当需要前倾时,控制器分别向泵电机、选择阀和第二电磁阀输出控制信号,泵电机带动泵进行运转,选择阀切换至自动驾驶模式,第二电磁阀得电,阀芯右移,液压油经泵、选择阀、第二电磁阀至倾斜缸,进行前倾动作,倾斜缸大腔进油,小腔回油时,需要经过平衡阀进行回油,确保前倾动作的平稳运行;当需要后倾时,控制器分别向泵电机、选择阀和第二电磁阀输出控制信号,泵电机带动泵进行运转,选择阀切换至自动驾驶模式,第二电磁阀得电,阀芯左移,液压油经泵、选择阀、第二电磁阀至倾斜缸,进行后倾动作,倾斜缸小腔进油,大腔回油。
[0038]
第三电磁阀控制第三油缸的伸出和缩回,当需要伸出时,控制器分别向泵电机、选择阀和第三电磁阀输出控制信号,泵电机带动泵进行运转,选择阀切换至自动驾驶模式,第三电磁阀得电,阀芯右移,液压油经泵、多路阀、选择阀、第三电磁阀至第三油缸,进行伸出动作,倾斜缸大腔进油,小腔回油;当需要缩回时,控制器分别向泵电机、选择阀和第三电磁阀输出控制信号,泵电机带动泵进行运转,选择阀切换至自动驾驶模式,第三电磁阀得电,阀芯左移,液压油经泵、多路阀、选择阀、第三电磁阀至第三油缸,进行缩回动作,倾斜缸小腔进油,大腔回油。由于第三油缸的动作要求平稳,因此控制器给泵电机的控制电流较小,一般泵电机维持较低的转速运转即可,约600r/min,因此,通过泵的转速实现变排量调速功能。
[0039]
当自动驾驶模式启动后,既没有举升、下降动作,也没有前倾、后倾动作,更没有转向动作,那么控制器会向选择阀和泵电机输出控制信号,选择阀自动切换至人工驾驶模式,
泵电机带动泵进行低速运转,泵通过多路阀进行卸荷,降低液压系统的发热,即节能模式。
[0040]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips