
 商标分类
商标分类  商标转让
商标转让 
腊肉、腊肠并联机器人自动装箱的专用组合夹持机构的制作方法
 2021-02-18 22:02:59|
2021-02-18 22:02:59| 361|
361| 起点商标网
起点商标网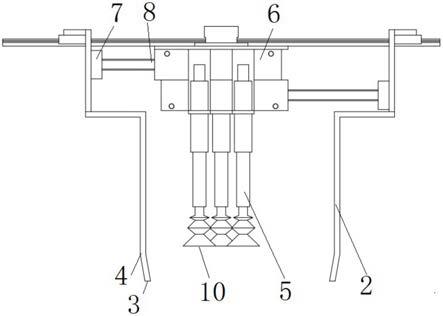
[0001]
本实用新型属于夹持装置技术领域,具体涉及一种腊肉、腊肠并联机器人自动装箱的专用组合夹持机构。
背景技术:
[0002]
装箱是食品、日化等许多产品生产过程的最后一个环节,产品经过装袋、装箱后才能发往终端销售,装箱工作通常采用人工装箱、自动装箱和机器人装箱三种方式,机器人装箱由于部署周期短、安装灵活,应用范围逐步扩大。一个典型的机器人装箱生产线主要包括物料输出线、纸箱输送线和机器人三部分构成,机器人以很高的速度从物料输送线上抓取物料,并将其以一定模式摆放在纸箱中。
[0003]
机器人自动装箱系统的重要指标为,装箱速度以及装箱成功率,其中装箱成功率更是作为一种重要的参数用来评定机器人装箱系统最终是否成功。由于受到物料形状与性状不同的制约,常规的吸盘拾取很难适应所有的物料,尤其装箱柔性比较大的物料时,常规拾取方法无论是吸盘吸取,还是气动抓手夹持,都很难克服物料形变从而导致拾取失败,或者勉强拾取后,由于装箱动作快,加减速剧烈而发生物料甩飞装箱不成功。
[0004]
在现有的解决方案中,无论是对吸盘的改进,例如海绵吸盘、伯努利吸盘等可以柔性的贴合物料表面,或是通过气缸连接的气动手爪,利用抓取的方式捡拾物料,都无法保证成功抓取,并抑制柔性物料在离开物料承载体表面,如物料输送带等约束后的大幅度形变。比较典型的是腊肉、腊肠等物料的自动装箱,由于此两种物料在拾取离开输送带约束后会产生比较大的形变,传统的捡拾机构无法快跟随这种形变导致夹持失败、装箱不成功。
技术实现要素:
[0005]
为了克服现有技术领域存在的上述技术问题,本实用新型的目的在于,提供一种腊肉、腊肠并联机器人自动装箱的专用组合夹持机构, 能够快速约束腊肠、腊肉物料发生形变, 可以实现腊肉、腊肠的自动装箱。
[0006]
本实用新型提供的腊肉、腊肠并联机器人自动装箱的专用组合夹持机构,包括机架、主夹持抓手、辅助约束吸盘、驱动装置,所述主夹持抓手、驱动装置安装在机架上,所述主夹持抓手与驱动装置连接,且主夹持抓手与驱动装置之间设有磁缓冲机构,所述辅助约束吸盘固定在驱动装置上,所述主夹持抓手的长度较辅助约束吸盘的长度长。
[0007]
所述机架的底部安装有滑轨,所述主夹持抓手包括夹持手掌、夹持手指、直线轴承,所述直线轴承安装在滑轨上,所述夹持手掌一端连接直线轴承,另一端连接夹持手指,中部连接磁缓冲机构,其主要完成夹持腊肉及腊肠物料,完成固定、兜底、防脱落的功能,另外较为宽大的夹持手指可以在快速移动的装箱过程中约束物料避免甩料。
[0008]
所述夹持手指呈v形,v形夹持手指保证夹持物料后,夹持手指向里靠拢,贴合物料的底部。
[0009]
进一步的,所述夹持手指设有倒锯齿防脱层。
[0010]
所述夹持手指上采用软硅胶附着一层倒锯齿防脱层,倒锯齿状的防脱落层,增加接触面积,提高接触摩擦力,保证物料成功被捡拾。
[0011]
进一步的v形夹持手指与倒锯齿防脱层相配合,夹持过程中,通过向内的挤压力使物料移动至倒锯齿防脱层的锯齿上方,使物料在高速运动中也不易出现滑落。
[0012]
所述夹持手掌包括水平设置的上、下连接部和竖直设置的受力部,所述上、下连接部与受力部连接形成方向相反的直角。
[0013]
所述夹持手掌与夹持手指侧面呈t形,t形主夹持抓手,较窄的夹持手掌与宽阔的夹持手指的组合在保证最小重量的前提下尽量增大手指与物料的接触面积,提高夹持成功率。
[0014]
所述辅助约束吸盘包括吸盘和缓冲杆,所述吸盘安装在缓冲杆的底部,所述缓冲杆上设有缓冲弹簧。
[0015]
所述驱动装置包括驱动气缸、磁缓冲机构和连接块,所述磁缓冲机构一侧连接驱动装置,另一端连接连接块,所述连接块连接主夹持抓手。
[0016]
进一步的,所述驱动装置安装在机架的中部,所述主夹持抓手包括左、右主夹持抓手,左、右主夹持抓手安装在机架上且对称设于驱动装置两侧,所述驱动气缸包括左驱动气缸和右驱动气缸,分别控制左、右主夹持抓手。
[0017]
本实用新型提供的腊肉、腊肠并联机器人自动装箱的专用组合夹持机构,其有益效果在于,设置滑轨以及直线轴承,在主夹持抓手夹持物料时抵消作用在夹持手指上的力产生的力矩。以此保证手掌处的平滑运动,保护驱动气缸的气缸杆,提高使用寿命,同时设置磁缓冲机构,在主夹持抓手快速开合时起缓冲保护作用;设置辅助约束吸盘配合夹持手指,相互作用稳定物料,使物料保持在夹持手指夹持力的作用范围内,不会由于形变而脱离夹持手指的夹持,设置倒锯齿防脱层由倒锯齿状的软硅胶构成,增大夹持手指与物料表面的摩擦力,防止物料在装箱快速运动中滑落,装箱成功率达99.99%,装箱后物料摆放规整、装箱速度快。
附图说明
[0018]
图1是本实用新型一个实施例的整体俯视图;
[0019]
图2是本实用新型一个实施例的整体主视图;
[0020]
图3是本实用新型一个实施例的整体左视图;
[0021]
图4是本实用新型一个实施例的立体结构图;
[0022]
图中标注:
[0023]
1.机架;2.夹持手掌;3.夹持手指;4.倒锯齿防脱层;5.缓冲杆;6.驱动气缸;7.连接块;8.磁缓冲机构;9.滑轨;10.吸盘。
具体实施方式
[0024]
下面参照附图,结合一个实施例,对本实用新型提供的腊肉、腊肠并联机器人自动装箱的专用组合夹持机构进行详细的说明。
实施例
[0025]
参照图1-图4,本实施例的腊肉、腊肠并联机器人自动装箱的专用组合夹持机构,包括机架1、主夹持抓手、辅助约束吸盘、驱动装置,所述主夹持抓手、驱动装置安装在机架1上,所述主夹持抓手与驱动装置连接,且主夹持抓手与驱动装置之间设有磁缓冲机构,所述辅助约束吸盘固定在驱动装置上,所述主夹持抓手的长度较辅助约束吸盘的长度长。
[0026]
所述机架的底部安装有滑轨9,所述主夹持抓手包括夹持手掌2、夹持手指3、直线轴承,所述直线轴承安装在滑轨上,所述夹持手掌2一端连接直线轴承,另一端连接夹持手指3,中部连接磁缓冲机构8,其主要完成夹持腊肉及腊肠物料,完成固定、兜底、防脱落的功能,另外较为宽大的夹持手指3可以在快速移动的装箱过程中约束物料避免甩料。
[0027]
所述夹持手指3呈v形,v形夹持手指保证夹持物料后,夹持手指3向里靠拢,贴合物料的底部。
[0028]
所述夹持手指3设有倒锯齿防脱层4。
[0029]
进一步的,所述夹持手指3上采用软硅胶附着一层倒锯齿防脱层4,倒锯齿状的防脱落层,增加接触面积,提高接触摩擦力,保证物料成功被捡拾。
[0030]
进一步的v形夹持手指与倒锯齿防脱层4相配合,夹持过程中,通过向内的挤压力使物料移动至倒锯齿防脱层4的锯齿上方,使物料在高速运动中也不易出现滑落。
[0031]
所述夹持手掌2包括水平设置的上、下连接部和竖直设置的受力部,所述上、下连接部与受力部连接形成方向相反的直角。
[0032]
所述夹持手掌2与夹持手指3侧面呈t形,t形主夹持抓手,较窄的夹持手掌与宽阔的夹持手指的组合在保证最小重量的前提下尽量增大手指与物料的接触面积,提高夹持成功率。
[0033]
所述辅助约束吸盘包括吸盘10和缓冲杆5,所述吸盘10安装在缓冲杆5的底部,所述缓冲杆5上设有缓冲弹簧。
[0034]
所述驱动装置包括驱动气缸6、磁缓冲机构8和连接块7,所述磁缓冲机构一侧连接驱动装置,另一端连接连接块,所述连接块连接主夹持抓手。
[0035]
进一步的,所述驱动装置安装在机架的中部,所述主夹持抓手包括左、右主夹持抓手,左、右主夹持抓手安装在机架上且对称设于驱动装置两侧,所述驱动气缸包括左驱动气缸和右驱动气缸,分别控制左、右主夹持抓手。
[0036]
进一步的,所述辅助约束吸盘设有3个,且呈品字形设置。
[0037]
腊肉、腊肠物料形变的主要原因是由于夹持两侧对中间生成的挤压力,或者吸盘吸附中心位置提升时两侧由于重力产生的下坠。而两者同时作用时却刚好可以相互约束彼此对物料产生的形变。辅助约束吸盘的作用即是在主夹持抓手夹持物料两侧时,通过对中心位置的压力抵消抓手由两侧向中心的挤压力,使物料保持夹持范围内的平整,提高夹持效率。
[0038]
在物料入箱的过程中,主夹持抓手松开,但是由于倒锯齿防脱层使得物料无法顺利下落,此时辅助约束吸盘的缓冲弹簧,由于失去了夹持力的约束开始复位,复位的过程中将物料下压脱离倒锯齿防脱层,进入箱中,完成装箱落料动作。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips