
 商标分类
商标分类  商标转让
商标转让 
可移动微重力环境模拟装置的制作方法
 2021-02-18 20:02:31|
2021-02-18 20:02:31| 314|
314| 起点商标网
起点商标网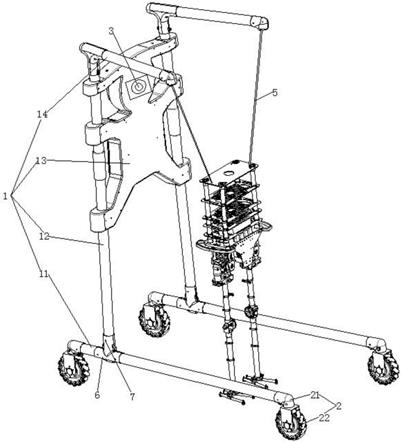
[0001]
本实用新型属于低重力模拟装置领域,特别是涉及一种可移动微重力环境模拟装置。
背景技术:
[0002]
目前,常用的微重力模拟方法包括落塔法、抛物飞行法、水浮法、气浮法、悬吊法和静平衡法等。现有的悬吊法主要采用的是固定悬吊方式的吊绳方案,存在控制难度大,占用面积较大等,而且位置固定不变,只能在室内实现,基本不具备可移动性,不能实现户外环境的模拟测试,使用效率较低。
技术实现要素:
[0003]
本实用新型的目的是克服了现有技术的问题,提供了一种可自动跟随目标移动、实现对所拉动的目标进行多种微重力的模拟、结构简单的可移动微重力环境模拟装置。
[0004]
为了达到上述目的,本实用新型采用以下方案:
[0005]
可移动微重力环境模拟装置,包括悬吊支架;还包括:
[0006]
自动导向移动装置,其设于所述悬吊支架底端,用于驱动所述悬吊支架移动;
[0007]
路线采集装置,其设于所述悬吊支架上且与所述自动导向移动装置电性连接;
[0008]
起吊装置,其设于所述悬吊支架上;
[0009]
牵引绳,其与所述起吊装置连接;所述起吊装置驱动所述牵引绳伸长或收缩;
[0010]
力量参数反馈装置,其设于所述悬吊支架上且与所述起吊装置电性连接。
[0011]
进一步地,所述悬吊支架包括:
[0012]
两根底支杆;所述自动导向移动装置设于所述底支杆上;
[0013]
两根竖向支杆,其分别与两根所述底支杆连接;
[0014]
人形支架,其连接于两根竖向支杆之间;所述路线采集装置设于所述人形支架上;
[0015]
两根顶支杆,其分别与两根所述竖向支杆的上端连接;每根顶支杆的前端均设有一个所述起吊装置和力量参数反馈装置。
[0016]
进一步地,每根所述底支杆的两端分别设有一个所述自动导向移动装置;所述自动导向移动装置包括方向控制装置和移动滚轮。
[0017]
进一步地,所述移动滚轮为麦克纳姆轮。
[0018]
进一步地,所述顶支杆的前端具有一个杆内腔;所述力量参数反馈装置设于所述杆内腔内;所述起吊装置设于所述杆内腔内;所述起吊装置包括驱动电机和绕绳轮;所述牵引绳连接在所述绕绳轮上;所述驱动电机的输出轴与所述绕绳轮连接且驱动所述绕绳轮旋转以伸长或收缩。
[0019]
进一步地,所述悬吊支架为碳纤维悬吊支架。
[0020]
进一步地,所述顶支杆与下方对应的所述底支杆相平行。
[0021]
进一步地,所述竖向支杆的下端与所述底支杆之间、所述竖向支杆的上端与所述
顶支杆之间通过螺钉和三通套筒连接。
[0022]
进一步地,所述力量参数反馈装置为拉力传感器。
[0023]
进一步地,所述路线采集装置为摄像采集装置。
[0024]
与现有的技术相比,本实用新型具有如下优点:
[0025]
本实用新型将牵引绳系目标上进行牵引,使目标处于低重力状态,通过力量参数反馈装置反馈的数据,使起吊装置可持续驱动牵引绳的伸长或收缩,以提供相同的牵引绳的拉力,实现精准的拉力抵消重力,保证目标处于低重力状态,同时,通过自动导向移动装置驱动悬吊支架跟随目标移动,并根据路线采集装置采集并反馈目标移动的路线数据,及时调整移动路线,使该可移动微重力环境模拟装置可全自动实现跟随目标移动,并且可持续在目标上方提供拉力,实现对所拉动的目标进行多种微重力的模拟,如固定在室内的微重力模拟、户外环境移动的微重力模拟,结构简单、灵活多变,使用效率高,成本低。
附图说明
[0026]
下面结合附图和具体实施方式对本申请作进一步详细的说明。
[0027]
图1是本实用新型的可移动微重力环境模拟装置的立体示意图。
[0028]
图2是本实用新型的可移动微重力环境模拟装置一方向角度的结构示意图。
[0029]
图3是本实用新型的起吊装置的结构示意图。
[0030]
图4是本实用新型的力量参数反馈装置与起吊装置之间电连接示意图。
[0031]
图中包括:
[0032]
悬吊支架1、底支杆11、竖向支杆12、人形支架13、顶支杆14、自动导向移动装置2、方向控制装置21、移动滚轮22、路线采集装置3、起吊装置4、驱动电机41、绕绳轮42、牵引绳5、力量参数反馈装置6、螺钉7、三通套筒8。
具体实施方式
[0033]
下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
[0034]
如图1至图4所示,可移动微重力环境模拟装置包括悬吊支架1、自动导向移动装置2、路线采集装置3、起吊装置4、牵引绳5和力量参数反馈装置6。自动导向移动装置2设于所述悬吊支架1底端,用于驱动所述悬吊支架1移动;该自动导向移动装置2具有数据分析、方向改变和驱动悬吊支架1移动的功能。路线采集装置3设于所述悬吊支架1上且与所述自动导向移动装置2电性连接;该路线采集装置3 为摄像采集装置;该路线采集装置3根据摄像头采集目标移动位置相对悬吊支架1前后、左右的位置,以及移动方向是否有障碍物,生成反馈信息反馈至自动导向移动装置2;自动导向移动装置2根据这些反馈信息,与自动导向移动装置2内的数据库相对比,自动调整移动的路线跟随目标同步移动。起吊装置4设于所述悬吊支架1上;牵引绳5,其与所述起吊装置4连接;所述起吊装置4驱动所述牵引绳5伸长或收缩;力量参数反馈装置6设于所述悬吊支架1上且与所述起吊装置4 电性连接。该力量参数反馈装置6为拉力传感器。目标移动,牵动牵引绳5,牵引绳5的拉力超过或低于设定的范围,该力量参数反馈装置 6及时检测并反馈数据至起吊装置4,起吊装置4根据力量参数反馈装置6反馈的数据可持续驱动牵引绳5的伸长或收缩,以提供相同的牵引绳5的拉力,实
现精准的拉力抵消重力,保证目标处于低重力状态。上述目标指人或微重力模拟实验体(机器人)等;在本具体实施方式中,目标是指微重力模拟实验体(机器人)。
[0035]
该可移动微重力环境模拟装置将牵引绳5系在目标上进行牵引,使目标处于低重力状态,通过力量参数反馈装置6反馈的数据,使起吊装置4可持续驱动牵引绳5的伸长或收缩,以提供相同的牵引绳5 的拉力,实现精准的拉力抵消重力,保证目标处于低重力状态,同时,通过自动导向移动装置2驱动悬吊支架1跟随目标移动,并根据路线采集装置3采集并反馈目标移动的路线数据,及时调整移动路线,使该可移动微重力环境模拟装置可全自动实现跟随目标移动,并且可持续在目标上方提供拉力,实现对所拉动的目标进行多种微重力的模拟,如固定在室内的微重力模拟、户外环境移动的微重力模拟,结构简单、灵活多变,使用效率高,成本低。
[0036]
悬吊支架1包括底支杆11、竖向支杆12、人形支架13和顶支杆 14。其中,所述自动导向移动装置2设于所述底支杆11上;两根竖向支杆12分别与两根所述底支杆11连接;人形支架13连接于两根竖向支杆12之间;所述路线采集装置3设于所述人形支架13上,方便该人形支架13设计是通过人带“t”字帽子,然后大字张开,形成一个“天”字;双手双脚分别与两根竖向支杆12连接,使该可移动微重力环境模拟装置整体美观,视觉效果好。两根顶支杆14分别与两根所述竖向支杆12的上端连接;每根顶支杆14的前端均设有一个所述起吊装置4和力量参数反馈装置6。通过将底支杆11、竖向支杆12、人形支架13和顶支杆14设置成悬吊支架1,使该可移动微重力环境模拟装置整体质量减轻,方便移动,大大缩小该可移动微重力环境模拟装置的占地面积。
[0037]
优选的,所述悬吊支架1为碳纤维悬吊支架1。该悬吊支架1采用碳纤维制成,具有良好的硬度和强度,同时可以大大地减轻可移动微重力环境模拟装置整体质量,方便移动,灵活多变,适用于不同的环境,使用效率高,成本低。
[0038]
其中,所述顶支杆14与下方对应的所述底支杆11相平行。通过设置顶支杆14和对应的顶支杆14相平衡,便于起吊装置4对牵引绳5 的长度调节。
[0039]
为了竖向支杆12和底支杆11之间安装方便;所述竖向支杆12的下端与所述底支杆11之间、所述竖向支杆12的上端与所述顶支杆14 之间通过螺钉7和三通套筒8连接。将底支杆11和竖向支杆12相配合套设在三通套筒8上,在通过螺钉7锁紧固定,结构简单,拆装方便。
[0040]
在本具体实施方式中,每根所述底支杆11的两端分别设有一个所述自动导向移动装置2;即该自动导向移动装置2具有4个。所述自动导向移动装置2包括方向控制装置21和移动滚轮22。该具有数据分析、方向改变和驱动移动滚轮22转动的功能,可以实现4个移动在地面上实现任意方向的直线移动,更加灵活,可保证时刻紧随目标。
[0041]
具体的,所述移动滚轮22为麦克纳姆轮。通过使用4个麦克纳姆轮实现移动,可以在地面上实现任意方向的直线移动,更加灵活,可保证时刻紧随目标。
[0042]
所述顶支杆14的前端具有一个杆内腔;所述力量参数反馈装置6 设于所述杆内腔内;所述起吊装置4设于所述杆内腔内;即起吊装置4 和力量参数反馈装置6的数量具有2个。所述起吊装置4包括驱动电机41和绕绳轮42;所述牵引绳5连接在所述绕绳轮42上;所述驱动电机41的输出轴与所述绕绳轮42连接且驱动所述绕绳轮42旋转以伸长或收缩。通过将驱动电机41和绕绳轮42设于杆内腔内,使该可移动微重力环境模拟装置整体美观,同时,驱
动电机41根据力量参数反馈装置6反馈的数据可持续驱动绕绳轮42滚转,以使牵引绳5的伸长或收缩,使两条提供相同的牵引绳5的拉力,实现精准的拉力抵消重力,保证目标处于低重力状态。
[0043]
综上,本实用新型实施例提供一种移动微重力环境模拟装置。其中,该移动微重力环境模拟装置将牵引绳5系在目标上进行牵引,使目标处于低重力状态,通过力量参数反馈装置6反馈的数据,使起吊装置4可持续驱动牵引绳5的伸长或收缩,以提供相同的牵引绳5的拉力,实现精准的拉力抵消重力,保证目标处于低重力状态,同时,通过自动导向移动装置2驱动悬吊支架1跟随目标移动,并根据路线采集装置3采集并反馈目标移动的路线数据,及时调整移动路线,使该可移动微重力环境模拟装置可全自动实现跟随目标移动,并且可持续在目标上方提供拉力,实现对所拉动的目标进行多种微重力的模拟,如固定在室内的微重力模拟、户外环境移动的微重力模拟,结构简单、灵活多变,使用效率高,成本低。
[0044]
以上所述仅是本申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本申请的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips