
 商标分类
商标分类  商标转让
商标转让 
旋转平移打包设备的制作方法
 2021-02-18 10:02:32|
2021-02-18 10:02:32| 284|
284| 起点商标网
起点商标网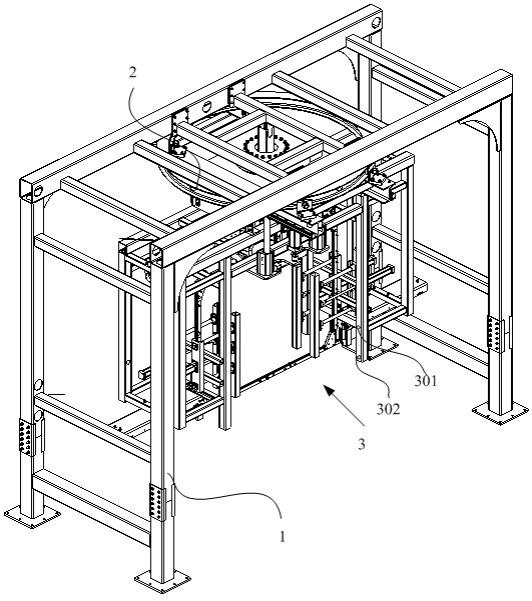
[0001]
本实用新型涉及打包机技术领域,尤其涉及一种旋转平移打包设备。
背景技术:
[0002]
目前,随着物流行业的不断发展,货物在运输前,通常需要通过打包带进行打包处理。而随着自动打包技术的推广,具有自动打包功能的打包机被广泛使用。例如:中国专利号200880103087.8公开了一种包装机,其主要利用打包带对货物进行打包处理。其中,该包装机中通常配置有包装头、包装斜槽和包装材料分配器等部件组成,其中,包装头具有引导包装材料(如打包带)进入和导出包装斜槽,并能够抓住、拉紧、切断和焊接包装材料。对于包装头而言,其通常包括拉紧组件和密封组件,在实际使用时,拉紧组件配置有拉紧爪来对包装材料进行牵引和施加拉紧力,而密封组件主要通过密封元件和切割器来焊接包装材料并切断包装材料。
[0003]
但是,常规的包装机在对货物进行打包过程中,货物通常需要缠绕多条打包带且需要对货物的前后和左右分别打包。而为了满足货物不同方向的打包要求,则需要在输送带上配置两台包装机,其中一台进行前后打包带的打包操作,而另一台则进行前后打包带的操作。而配置两台包装机,一方面使得运行成本增加,另一方面也占用较大的厂区面积。因此,如何设计一种占地面积小且运行成本低的打包技术是本实用新型所要解决的技术问题。
技术实现要素:
[0004]
本实用新型提供一种旋转平移打包设备,实现减小设备的占地面积,并降低运行成本低。
[0005]
本实用新型提供一种旋转平移打包设备,包括:
[0006]
支撑框架;
[0007]
旋转模块,所述旋转模块包括旋转导向部、旋转架和第一驱动机构,所述旋转导向部设置在所述支撑框架的顶部,所述旋转架可转动的设置在所述旋转导向部上,所述第一驱动机构用于驱动所述旋转架相对于所述旋转导向部转动;
[0008]
平移打包模块,所述平移打包模块包括滑动安装部、包装头、包装斜槽和第二驱动机构,所述滑动安装部可滑动的设置在所述旋转架上,所述包装头可上下移动的设置在所述滑动安装部上,所述包装斜槽设置在所述滑动安装部上,所述第二驱动机构用于驱动所述滑动安装部相对于所述旋转架往复移动。
[0009]
进一步的,所述旋转导向部包括回转支承,所述回转支撑的固定部设置在所述支撑框架的顶部,所述旋转架设置在所述回转支承的转动部上。
[0010]
进一步的,所述旋转导向部还包括环形滑轨,所述环形滑轨围绕在所述回转支承的外部并设置在所述支撑框架的顶部,所述旋转架还滑动设置在所述环形滑轨上。
[0011]
进一步的,所述环形滑轨设置环形导槽,所述旋转架设置有滚轮,所述滚轮位于所
述环形导槽中滚动。
[0012]
进一步的,所述旋转架包括两根横梁和至少一根加强梁,所述加强梁连接在两根所述横梁之间;每根所述横梁上设置有导轨,所述滑动安装部滑动设置在所述导轨上。
[0013]
进一步的,所述滑动安装部的顶部设置有两个相对布置的安装支架,所述安装支架上设置有滑块,所述滑块滑动设置在对应的所述导轨上
[0014]
进一步的,所述滑动安装部的两端部设置有朝下延伸的连接支架;所述包装斜槽包括两个侧部带槽,所述侧部带槽分布在所述包装头的两侧并相对布置,所述侧部带槽竖向设置在对应侧的所述连接支架上;其中,至少一所述侧部带槽的下端部设置有横向布置的底部带槽。
[0015]
进一步的,所述连接支架上还设置有定位组件,所述定位组件包括第一伸缩机构和压紧部件,所述第一伸缩机构横向设置在所述连接支架上,所述压紧部件设置在所述第一伸缩机构的移动部上,所述压紧部件位于所述侧部带槽的一侧。
[0016]
进一步的,所述连接支架底部设置有横向布置的第二伸缩机构,所述底部带槽设置在所述第二伸缩机构的移动部上。
[0017]
进一步的,所述滑动安装部上还设置有第三伸缩机构和升降平台,所述第三伸缩机构竖向设置在所述滑动安装部上,所述升降平台设置在所述第三伸缩机构的移动部上,所述包装头设置在所述升降平台上。
[0018]
本实用新型提供的一种旋转平移打包设备,通过旋转模块带动平移打包模块移动,以满足待打包的物品不同位置的打包要求,而旋转模块带动平移打包模块转动,以满足待打包的物品不同方向的打包要求;而在打包过程中,待打包的物品无需移动,仅需要通过所述旋转模块来带动所述平移打包模块转动和移动,便可以满足物品表面垂直交叉打包的要求,这样,便无需配置两台打包设备,一方面降低了企业的运行成本,另一方面旋转平移打包设备相比于两台设备而言,其占地面积更小。
附图说明
[0019]
图1为本实用新型旋转平移打包设备的结构示意图之一;
[0020]
图2为本实用新型旋转平移打包设备的结构示意图之二;
[0021]
图3为图2中a区域的局部放大示意图;
[0022]
图4为图2中b区域的局部放大示意图;
[0023]
图5为本实用新型旋转平移打包设备中旋转模块的结构示意图;
[0024]
图6为本实用新型旋转平移打包设备中旋转模块的爆炸图;
[0025]
图7为本实用新型旋转平移打包设备中平移打包模块的结构示意图;
[0026]
图8为本实用新型旋转平移打包设备的结构示意图之三。
具体实施方式
[0027]
下面结合附图对本实用新型进行详细说明。
[0028]
如图1-图7所示,本实用新型提供一种旋转平移打包设备,包括:
[0029]
支撑框架1;
[0030]
旋转模块2,旋转模块2包括旋转导向部21、旋转架22和第一驱动机构23,旋转导向
部21设置在支撑框架1的顶部,旋转架22可转动的设置在旋转导向部21上,第一驱动机构23用于驱动旋转架22相对于旋转导向部21转动;
[0031]
平移打包模块3,平移打包模块3包括滑动安装部31、包装头32、包装斜槽33和第二驱动机构34,滑动安装部31可滑动的设置在旋转架22上,包装头32可上下移动的设置在滑动安装部31上,包装斜槽33设置在滑动安装部31上,第二驱动机构34用于驱动滑动安装部31相对于旋转架22往复移动。
[0032]
在实际使用过程中,包装头32由外部的包装材料分配器来供给打包带进行打包,有关包装头32的具体结构形式可以参考常规打包机中的包装头,在此不做限制和赘述。同时,与包装头32配合使用的包装斜槽33而言,其用于供从包装头32输出的打包带传输使用,并且,在通过包装头32拉紧打包过程中,打包带又能够从包装斜槽33中脱离出并捆绑在待打包的物品表面。同样的,对于包装斜槽33的具体结构形式可以参考常规打包机中的包装斜槽结构,在此也不做限制和赘述。
[0033]
而在打包过程中,通过旋转模块2可以满足平移打包模块3旋转的要求,而平移打包模块3由能够带动包装头32和包装斜槽33平移。进而可以通过平移打包模块3围绕待打包的物品转动以满足两个相互垂直方向的打包要求,同时,平移打包模块3能够沿着待打包物品移动以实现在物品上打包形成多条打包带。具体过程如下:待打包的物品通过输送线或叉车运输至支撑框架1形成的打包工位处,通过旋转模块2带动平移打包模块3沿待打包物品的第一方向(如长度方向)移动,间隔设定的距离在物品上完成多道打包操作,以使得物品上捆扎所需数量的打包带;然后,通过旋转模块2带动平移打包模块3在物品的外侧转动,以使得平移打包模块3转动至第二方向(如宽度方向),然后,平移打包模块3在宽度方向上移动,并完成第二方向上多条打包带的捆扎要求。
[0034]
而在打包过程中,待打包的物品无需移动,仅需要通过旋转模块2来带动平移打包模块3转动和移动,便可以满足物品表面垂直交叉打包的要求,这样,便无需配置两台打包设备,一方面降低了企业的运行成本,另一方面旋转平移打包设备相比于两台设备而言,其占地面积更小。
[0035]
进一步的,由于平移打包模块3的整体重量较重,为了确保平移打包模块3能够由旋转模块2稳固可靠的承载并带动其转动,则旋转导向部21包括回转支承211,所述回转支撑的固定部设置在支撑框架1的顶部,旋转架22设置在回转支承211的转动部上。具体的,回转支承211具有平稳的转动性能和良好的承载能力,通过回转支承211能够承载平移打包模块3的整体重量,这样,通过第一驱动机构23提供驱动力来驱动旋转架22转动,以满足平移打包模块3的转动要求。
[0036]
优选地,为了进一步的提高转动平稳性和使用安全性,则旋转导向部21还包括环形滑轨212,环形滑轨212围绕在回转支承211的外部并设置在支撑框架1的顶部,旋转架22还滑动设置在环形滑轨212上。环形滑轨212位于回转支承211的外围并用于导向旋转架22转动,环形滑轨212引导旋转架22转动的同时,利用环形滑轨212还可以对旋转架22起到承载重量的辅助作用,进而更有利于提高旋转架22的转动平稳性和使用安全可靠性。其中,环形滑轨212设置环形导槽2121,旋转架22设置有滚轮220,滚轮220位于环形导槽2121中滚动。具体的,旋转架22通过配置滚轮220与环形滑轨212上的环形导槽2121配合来满足导向滑动和承载重量的要求。其中,环形滑轨212可以采用工字钢等钢构件加工而成。
[0037]
又进一步的,对于旋转架22而言,其上承载平移打包模块3,且能够满足平移打包模块3滑动的要求。为此,旋转架22可以包括两根横梁221和至少一根加强梁222,加强梁222连接在两根横梁221之间;每根横梁221上设置有导轨2211,滑动安装部31滑动设置在导轨2211上。具体的,加强梁222采用焊接的方式连接在两根横梁221之间,加强梁222则可以通过螺栓固定等方式连接在回转支承211的转动部上,同时,滚轮220则安装在横梁221的端部位置,以使得横梁221搭在环形滑轨212上。而横梁221上还配置有导轨2211,利用导轨2211来导向平移打包模块3中的滑动安装部31滑动,进而确保滑动安装部31能够平顺的滑动。其中,滑动安装部31的顶部设置有两个相对布置的安装支架311,安装支架311上设置有滑块312,滑块312滑动设置在对应的导轨2211上。
[0038]
更进一步的,为了满足包装斜槽33的安装要求,则滑动安装部31的两端部设置有朝下延伸的连接支架313,而包装斜槽33包括两个侧部带槽331和两个底部带槽332,侧部带槽331分布在包装头32的两侧并相对布置,侧部带槽331竖向设置在对应侧的连接支架313上。其中,至少一侧部带槽331的下端部设置有横向布置的底部带槽332。具体的,滑动安装部31整体采用框架结构,滑动安装部31的两侧配置有对应的连接支架313,连接支架313由滑动安装部31的顶部向下延伸,这样,便可以满足侧部带槽331纵向安装的要求,同时,对于底部带槽332则横向安装在连接支架313的底部位置。而在实际使用过程中,可以分别在侧部带槽331的底部配置有底部带槽332,进而在打包时,使得两侧的底部带槽332相对异向移动;或者,在其一侧部带槽331的底部配置有底部带槽332,在打包时,仅移动一侧的底部带槽332。最终,由包装头32、侧部带槽331和底部带槽332构成完整的类似于环形的通道共打包带输送。
[0039]
以下以配置两个底部带槽332为例,进行说明。对于打包带的输送路径,则打包带由外部包装材料分配器供给包装头32,包装头32将打包带先输送至其一侧的侧部带槽331,从包装头32输出的打包带经由一侧的侧部带槽331和该侧下方的底部带槽332输送,然后,进入另一侧下方的底部带槽332并向上进入到对应侧的侧部带槽331,最终,打包带返回至包装头32中。针对打包带的输送方式与常规打包机中打包带的输送方式类似,在此不做限制和赘述。
[0040]
其中,为了对打包的物品在打包过程中进行定位,则连接支架313上还设置有定位组件35,定位组件35包括第一伸缩机构351和压紧部件352,第一伸缩机构351横向设置在连接支架313上,压紧部件352设置在第一伸缩机构351的移动部上,压紧部件352位于侧部带槽331的一侧。具体的,物品在进行打包时,物品将位于两个连接支架313之间,然后,通过两侧的第一伸缩机构351动作,以使得压紧部件352抵靠在物品的侧部,进而实现对物品进行打包定位。而第一伸缩机构351的表现实体,可以采用气缸、电推杆或油缸等结构形式。
[0041]
另外,在平移打包模块3转动和移动过程中,为了避免底部带槽332碰到物品底部托盘上的垫块,则对于底部带槽332则采用可伸缩的结构设计,具体为:连接支架313底部设置有横向布置的第二伸缩机构36,底部带槽332设置在第二伸缩机构36的移动部上;在第二伸缩机构36带动底部带槽332伸出后,两个底部带槽332对接在一起,且底部带槽332与对应侧的侧部带槽331连接在一起。具体的,第二伸缩机构36能够带动底部带槽332移动,以使得两个相对布置的底部带槽332同步异向移动。当需要打包时,则第二伸缩机构36带动底部带槽332伸出并朝向连接支架313的内侧移动,最终,使得两个底部带槽332对接在一起;同时,
底部带槽332与对应侧的侧部带槽331也连接在一起。而在需要旋转平移打包模块3时,则第二伸缩机构36则带动底部带槽332回收,以使得底部带槽332回缩至连接支架313的内侧,这样,在平移打包模块3旋转过程中,连接支架313将外绕物品的外侧转动,同时,使得底部带槽332不至于碰到物品。第二伸缩机构36为了满足体积小且设备紧凑化的设计,则第二伸缩机构36优选采用无杆气缸,这样,可以最大限度的减小设备的整体尺寸。
[0042]
而对于包装头32而言,其要根据不同的物品高度要求,在打包过程中,滑动安装部31上还设置有第三伸缩机构37和升降平台38,第三伸缩机构37竖向设置在滑动安装部31上,升降平台38设置在第三伸缩机构37的移动部上,包装头32设置在升降平台38上。具体的,第三伸缩机构37能够驱动升降平台38上升和下降,以满足不同高度尺寸物品的打包要求。而相对应的,为了使得升降平台38能够顺畅的升降,则升降平台38上设置有导杆39和设置在滑动安装部31上的滑套391。
[0043]
其中,对于第一驱动机构23和第二驱动机构34而言,通常采用电机的方式来提供驱动力,而为了提高控制移动和转动的精确性,则优选采用伺服电机以提高精确性。例如:第一驱动机构23的电机上配置有齿轮,而回转支承211的转动部上配置有齿圈,齿轮与齿圈啮合实现旋转架22的转动。同样的,第二驱动机构34的电机上也配置有齿轮,而横梁221上则配置有齿条2212,齿轮与齿条2212啮合实现滑动安装部31的移动。
[0044]
优选实施例中,为了实现自适应调整打包带的位置和数量,则滑动安装部31上设置有用于检测待打包物品尺寸的第一检测模块301。具体的,第一检测模块301能够检测物品的尺寸,在滑动安装部31沿着物品移动过程中,通过第一检测模块301跟随滑动安装部31移动过程中,便可以对物品在该方向上的尺寸检测出;然后,再根据具体测量出的尺寸,依据事先设定好的打包规则进行打包。而针对不同尺寸物品在某一方向上的打包数量的规则设定,在此不做限制和赘述。
[0045]
同时,由于待打包的物品底部通常采用托盘来支撑,而打包带则需要穿过托盘上的叉车孔,并同时避让开托盘底部的垫块。考虑到托盘的影响,则滑动安装部31上还设置有用于检测承载待打包物品托盘的叉车孔位置的第二检测模块302,具体的,在滑动安装部31沿着物品移动过程中,一方面第一检测模块301能够对物品本身的尺寸进行检测,另一方面还可以通过第二检测模块302对物品下方的托盘进行测量,以确定托盘上叉车孔的位置。这样,在进行打包过程中,根据物品的整体尺寸并结合托盘上叉车孔的位置来确定打包带的打包位置和数量,以实现自适应打包操作。
[0046]
其中,对于第一检测模块301和第二检测模块302的表现实体有多种形式。例如:第一检测模块301和第二检测模块302可以采用光电传感器的方式,光电传感器能够检测其前方是否有物品遮挡,这样,可以根据光电传感器的开关信号结合伺服电机带动滑动安装部31的移动位移,检测出物品的尺寸参数以及托盘上叉车孔的位置。或者,第一检测模块301和第二检测模块302可以图像采集器(如摄像头),利用图像识别技术来获得物品的外形尺寸以及托盘上叉车孔和垫块的位置,而有关图像处理的具体方法可以参考常规图像处理技术,在此不做限制和赘述。
[0047]
其中,有关上述电机输出动力实现传动连接的方式,可以采用在电机转轴增加减速器的方式,在此不做限制和赘述。
[0048]
本实用新型还提供了一种旋转平移打包设备的打包方法,具体包括:将待打包物
品输送至支撑框架1的下方,平移打包模块3移动沿第一方向移动并在物品上完成多道打包操作,然后,平移打包模块3旋转90度并沿第二方向移动以在物品上完成多道打包操作。
[0049]
具体为:在实际使用过程中,待打包的物品则通过输送线或叉车运输至旋转平移打包设备的打包工位。通过移动平移打包模块3,进行第一方向上的打包操作,处理完后,再转动平移打包模块3并继续移动平移打包模块3,以进行第二方向上的打包操作。
[0050]
其中,具体的打包操作包括如下步骤:
[0051]
步骤1、待打包物品输送至支撑框架1的下方后,平移打包模块3沿第一方向移动并测量待打包物品第一方向的长度尺寸。物品放置在支撑框架1形成的打包工位处,然后,旋转模块2则带动平移打包模块3沿物品的第一方向移动,以通过第一检测模块301对物品第一方向上的尺寸进行测量。
[0052]
步骤2、根据测量的第一方向上待打包物品的长度尺寸信息,计算出第一方向打包带的捆扎数量和打包位置。步骤1中平移打包模块3从所述滑轨的一端部朝向另一端滑动并完成测量后,根据第一方向上物品的尺寸,结合事先设定的打包规则,则间隔一定的距离在物品外围打包特定数量的打包带。
[0053]
步骤3、平移打包模块沿第一方向反向移动,并在待打包物品上计算出的打包位置捆扎打包带。具体的,驱动平移打包模块3反向移动,以在第一方向上对物品进行打包处理。
[0054]
步骤4、旋转模块2带动平移打包模块3在待打包物品的外侧旋转90度,平移打包模块3沿第二方向移动并测量待打包物品第二方向的长度尺寸。在完成第一方向的打包操作后,则需要对平移打包模块3转动,以使得平移打包模块3旋转至第二方向上进行交叉打包处理。在平移打包模块3完成第一方向的打包操作后,其移动到所述滑轨的一端部以避让开物品,然后再旋转90度后。
[0055]
步骤5、根据测量的第二方向的长度尺寸信息,计算出第二方向打包带的捆扎数量和打包位置。在第二方向进行打包时,通过步骤4测量出物品第二方向上的尺寸后,再次计算第二方向上的打包位置和打包的次数。
[0056]
步骤6、平移打包模块沿第二方向反向移动,并在待打包物品上计算出的打包位置捆扎打包带。
[0057]
进一步的,在打包过程中,考虑到物品底部托盘的影响,则所述步骤1还包括:平移打包模块3沿第一方向移动过程中,检测待打包物品底部托盘沿第一方向上的叉车孔位置。具体的,通过第二检测模块302来对托盘第一方向上的叉车孔位置进行检测,进而在计算打包位置时,以避让开托盘的垫块,以使得打包带穿过叉车孔进行打包处理。相对应的,所述步骤2还包括:根据测量的第一方向上待打包物品的长度尺寸信息以及叉车孔位置信息,计算出第一方向打包带的捆扎数量和打包位置。
[0058]
同样的,在进行第二方向的物品打包过程中,则所述步骤4还包括:平移打包模块3沿第二方向移动过程中,检测待打包物品底部托盘沿第二方向上的叉车孔位置;所述步骤5还包括:根据测量的第二方向上待打包物品的长度尺寸信息以及叉车孔位置信息,计算出第二方向打包带的捆扎数量和打包位置。
[0059]
基于上述技术方案,可选的,在本实用新型另一个实施例中,为了实现功能集成化设计,在物品打包完成后,实现对物品表面进行裹膜处理,则如图8所示,则在其中一连接支架313上设置有缠膜模块4,所述缠膜模块用于向外输送薄膜并将薄膜缠绕在待打包的物品
上。在实际使用过程中,在通过平移打包模块3对物品完成打包操作后;利用滑动安装部31能够跟随旋转模块2转动,则在滑动安装部31转动过程中,通过缠膜模块4向外输送薄膜,以实现将薄膜缠绕在打包好的物品上,进而实现自动缠膜的操作。缠膜模块4利用滑动安装部31的转动功能来实现自动缠膜,使得设备的功能多样化,集成化程度更高,减少厂区内设备的采购数量,更有利于减少设备的占地面积。其中,缠膜模块4的表现实体可以采用常规技术中的设备,例如:中国专利号2004100353283公开的一种用于在物体周围包裹塑料膜网的包装机中的薄膜发放器,当然,本领域技术人员根据实际需要还可以采用其他能够向外输送薄膜的设备,在此不做限制和赘述。
[0060]
其中,为了针对不同高度的物品进行裹膜,则在连接支架313上还设置有升降机构41,升降机构41能够带动缠膜模块4上下移动,进而满足不同高度尺寸物品的裹膜要求。另外,相对应的,在对物品进行裹膜的过程中,底部还配置有用于夹持住薄膜端部的夹持机构42,夹持机构42夹持住薄膜的自由端部 ,然后,在缠膜模块4转动过程中,以使得薄膜能够更加紧实的包裹在物品的表面。同样的,为了实现自动断膜,还配置有断膜机构43,在缠绕完薄膜后,利用断膜机构43自动将薄膜切断。而针对夹持机构42和断膜机构43的具体表现实体,可以参考中国专利号2004100353283公开的一种用于在物体周围包裹塑料膜网的包装机中的相关配置结构,在此不做限制和赘述。
[0061]
对于上述实施例中记载的第一方向和第二方向,则可以以物品的长度方向为第一方向,以物品的宽度方向为第二方向,在此不做限制。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 打包带
 热门咨询
热门咨询




tips