
 商标分类
商标分类  商标转让
商标转让 
用于自动塑膜机的包装盒连体防撞装置的制作方法
 2021-02-18 10:02:11|
2021-02-18 10:02:11| 304|
304| 起点商标网
起点商标网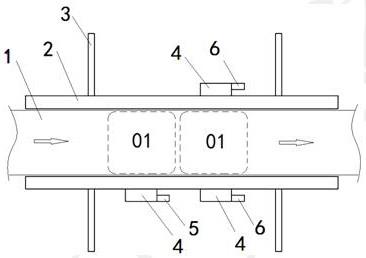
[0001]
本实用新型涉及全自动塑膜包装设备,特别涉及一种用于自动塑膜机的包装盒连体防撞装置。
背景技术:
[0002]
现有自动塑膜机自安装生产以来长期不稳定,配合进料的包装盒达不到一盒封一个膜的标准效果,经常会产生二个或多个包装盒塑膜后粘在一起的现象,以至会导致进入“推盒塑封顶部与底部”工序的时候,将包装盒推挤坏,而造成产品的损失。造成二个盒子的塑膜会粘在一起的原因有塑封膜与过渡辊摩擦而产生的静电,安装塑封膜的原纸筒有偏差导致膜有左右的摆动,使得下膜存在偏差,而造成前膜与后膜粘连在一起。因此会造成自动塑膜机卡机或停机现象,影响产品质量和生产效率。
技术实现要素:
[0003]
针对上述技术问题,本实用新型提供一种用于自动塑膜机的包装盒连体防撞装置,能够自动检测盒子粘连现象,解决自动塑膜机出现的盒子粘连现象,避免塑膜机进行推盒动作时,挤压而造成包装盒损坏,以防止产品在包装过程中的损失,提高产品质量。
[0004]
本实用新型采用以下技术方案实现上述目的。一种用于自动塑膜机的包装盒连体防撞装置,包括输送带,所述输送带的两侧通过支杆固定有侧挡板,侧挡板的上方通过固定架安装有第一光电传感器和第二光电传感器, 第一光电传感器和第二光电传感器均与控制器连接。
[0005]
本实用新型通过第一光电传感器和第二光电传感器将感应到信号后传输至控制器,进而触发下一步气缸动作,防止了因盒子粘合而损坏,达到节约盒子减少损失的目的,提高了产品的质量。
附图说明
[0006]
图1是本实用新型结构的主视图;
[0007]
图2是本实用新型结构的俯视图;
[0008]
图3是本实用新型中电控器线路图。
[0009]
图中:01.产品包装盒,1.输送带,2.侧挡板,3.支杆,4.固定架,5.第一光电传感器,6.第二光电传感器,7.控制器。
具体实施方式
[0010]
以下结合附图和实施例对本实用新型做进一步说明。参见图1,一种用于自动塑膜机的包装盒连体防撞装置,包括输送带1,输送带1的两侧通过支杆3固定有侧挡板2,侧挡板2的上方通过固定架4安装有第一光电传感器5和第二光电传感器6, 第一光电传感器5和第二光电传感器6均与控制器7连接。
[0011]
本实用新型连体盒子防撞装置,在输送带1的两侧通过支杆3固定有侧挡板2,侧挡板2的上方通过固定架4安装有第一光电传感器5和第二光电传感器6(如图1和图2所示),侧挡板2分别用m5螺丝固定在支杆3上,使其能够作为支撑盒子的两侧,当盒子通过输送带传送时,会被两侧的侧挡板2夹住而不会跑偏,使得传送顺利便于第一光电传感器5和第二光电传感器6进行检测,第一光电传感器5和第二光电传感器6分别由两颗m3的螺丝固定在固定架4上,避免设备运行中的抖动而导致光电传感器的脱落。
[0012]
控制器7(如图3所示)内装有plc(型号:fx3ga-14mr-cm)305、复位开关(zb2-be101c)303和连接直流电正极24v的中间继电器(jzx-22f2z)304。plc 305通过接口x0与单漫反射性电眼第一光电传感器5(型号:cx-422)连接,通过接口x1与双对射电眼第二光电传感器6(型号:cx-411e和cx-411d)连接,通过接口x3与复位开关303连接。采用三菱gx-developer编程软件编程,通过接口y0与中间继电器304连接。
[0013]
控制器7的输入端由外部塑膜机提供交流电火线l1、零线n1、地线pe、直流电正极24v和负极0v,当电压输入到控制器7得电后就处于运行当中。当塑膜好的单个产品包装盒01通过主机热封好上下面的时候,经过输送带1送至第一光电传感器5,第一光电传感器5感应到信号后输入一个信号x0传输至控制器装置7,采集第一光电传感器5至照射到单个产品包装盒01从开始进入至离开(即通过第一光电传感器5)所需要的时间,以及单个产品包装盒01再由输送带1传送至第二光电传感器6,第二光电传感器6采集到信号输入接口x1,再传送至控制器7,采集第二光电传感器6照到单个产品包装盒01开始至离开(即通过第二光电传感器6)所需的时间,并且与第一光电传感器5采集到的时间进行对比。当第二光电传感器6采集到的时间与第一光电传感器5采集到的时间一致时,产品包装盒01被传送带1送至下一步,然后接着进行上下膜的热封。当第二光电传感器6采集到的时间大于单个产品包装盒01采集到的时间时,说明产品包装盒01出现了粘合现象,进而通过控制器7输出接口y0,接口y0再与外部输入的正极24v控制中间继电器304,使得下一步气缸不允许动作,以免造成产品包装盒01的挤压损坏。本控制器7还采用了双保险措施,当单个产品包装盒01经过第一光电传感器5采集信号输入接口x0并传送至控制器7,再经过第二光电传感器6的时候,第二光电传感器6采集信号输入接口x1传送至控制器7,由于第一光电传感器5与第二传感器6的安装距离大于单个产品包装盒01的位置且又小于二个产品包装盒01的位置,所以当第一光电传感器5与第二光电传感器6之中只有一个信号的时候,说明产品包装盒01没有粘在一起,则产品包装盒01传送至下一步进行热封。当第一光电传感器5和第二光电传感器6同时输入信号的时候说明有二个产品包装盒01粘在了一起,二个信号共同输入的时候,通过控制器7输出接口y0与外部输入的正极24v控制中间继电器304,控制下一步气缸需要工作的常闭触点,使得常闭触点变常开触点,使得下一步气缸不允许动作,从而达到产品包装盒01不会被撞坏的效果。再启动设备的时候,将粘在一起的产品包装盒01取开,按下复位开关303将输入一个信号至接口x2并传送至控制器7,通过控制器7即复位上述所有动作,此时设备将继续正常运行,周而复始这样一直执行下去。从而达到减少损失和提高产品质量的目的。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips