
 商标分类
商标分类  商标转让
商标转让 
一种上料压合机械臂的制作方法
 2021-02-18 01:02:46|
2021-02-18 01:02:46| 106|
106| 起点商标网
起点商标网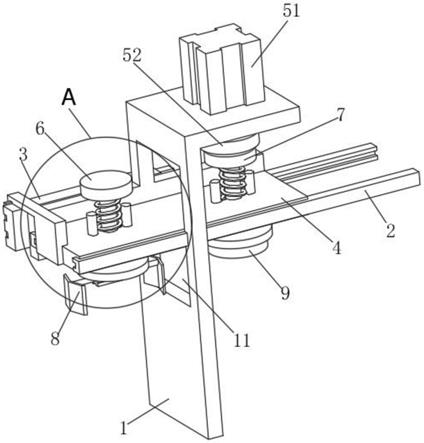
[0001]
本实用新型涉及机械臂领域,具体涉及一种上料压合机械臂。
背景技术:
[0002]
塑料筒体和塑料盖子是生活中最常用的储存产品,筒体在装满料后均需要将塑料盖子盖在筒体上进行组装。
[0003]
现有的塑料筒体和塑料盖子组装均由人工拿取盖子后,与筒体进行对齐后再人工用力将其压合,组装效率低且劳动强度大。
技术实现要素:
[0004]
本实用新型的目的是:提供一种上料压合机械臂,可自动将盖子抓取放置到筒体上并且自动压合,提高组装效率,降低劳动强度。
[0005]
为了实现上述目的,本实用新型提供如下的技术方案:
[0006]
一种上料压合机械臂,包括l形支架和导轨;所述l形支架的水平段连接有下压机构,竖直段设有通孔;所述导轨连接在l形支架上且穿过通孔,所述导轨一侧固定连接有横向移动机构,导轨上可滑动连接有滑动板,横向移动机构的移动台与滑动板连接;所述滑动板的一端连接有第一伸缩模块,另一端连接有第二伸缩模块;所述第一伸缩模块底端连接有夹爪机构,第二伸缩模块连接有压合板。
[0007]
进一步的,所述第一伸缩模块与第二伸缩模块的结构相同;所述第一伸缩模块包括t形块、复位弹簧和连接板;所述t形块的底端穿过滑动板与连接板连接;所述复位弹簧套设在t形块上且位于t形块顶端与滑动板之间。
[0008]
进一步的,所述连接板的顶端连接有导向柱,导向柱穿过滑动板;所述夹爪机构连接在第一伸缩模块的连接板上;所述压合板连接在第二伸缩模块的连接板上;所述夹爪机构包括双向双杆气缸和两个v形块;两个所述v形块分别连接在双向双杆气缸的两端活塞杆上。
[0009]
进一步的,所述下压机构包括下压气缸和下压板;所述下压气缸连接在l形支架的水平段的上方,下压气缸的活塞杆穿过所述l形支架的水平段与下压板连接。
[0010]
本实用新型的有益效果为:本实用新型所述的一种上料压合机械臂,采用横向移动机构带动滑动板上的夹爪机构和压合板,配合下压机构,可同步自动将盖子抓取放置到筒体上并且自动压合,提高组装效率,降低劳动强度。
附图说明
[0011]
图1为本实用新型一种上料压合机械臂的第一角度视图;
[0012]
图2为本实用新型一种上料压合机械臂的第二角度视图;
[0013]
图3为图2的a部放大图;
[0014]
图中:1、l形支架;11、通孔;2、导轨;3、横向移动机构;4、滑动板;51、下压气缸;52、
下压板;6、第一伸缩模块;61、t形块;62、复位弹簧;63、连接板;64、导向柱;7、第二伸缩模块;8、夹爪机构;81、双向双杆气缸;82、v形块;9、压合板。
具体实施方式
[0015]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型作进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
[0016]
参考图1至图3,一种上料压合机械臂,包括l形支架1和导轨2;所述l形支架1的水平段连接有下压机构,竖直段设有通孔11;所述导轨2连接在l形支架1上且穿过通孔11,所述导轨2一侧固定连接有横向移动机构3,导轨2上可滑动连接有滑动板4,横向移动机构3的移动台与滑动板4连接;所述滑动板4的一端连接有第一伸缩模块6,另一端连接有第二伸缩模块7;所述第一伸缩模块6底端连接有夹爪机构8,第二伸缩模块7连接有压合板9。
[0017]
所述第一伸缩模块6用于带动夹爪机构8升降,第二伸缩模块7用于带动压合板9升降;所述横向移动机构3用于带动滑动板4上的第一伸缩模块6或第二伸缩模块7移动至下压至机构8的下方。
[0018]
所述第一伸缩模块6与第二伸缩模块7的结构相同;所述第一伸缩模块6包括t形块61、复位弹簧62和连接板63;所述t形块61的底端穿过滑动板4与连接板63连接;所述复位弹簧62套设在t形块61上且位于t形块61顶端与滑动板4之间。
[0019]
所述连接板63的顶端连接有导向柱64,导向柱64穿过滑动板4;所述夹爪机构8连接在第一伸缩模块6的连接板63上;所述压合板9连接在第二伸缩模块7的连接板63上;所述夹爪机构8包括双向双杆气缸81和两个v形块82,双向双杆气缸81用于带动两个v形块82夹取盖子;两个所述v形块82分别连接在双向双杆气缸81的两端活塞杆上。
[0020]
所述下压机构包括下压气缸51和下压板52;所述下压气缸51连接在l形支架1的水平段的上方,下压气缸51的活塞杆穿过所述l形支架1的水平段与下压板52连接。本实施例中横向移动机构3具体采用伺服直线模组。
[0021]
工作原理:筒体放置到下压机构的正下方,由外部盖子上料机构带动盖子移动至夹爪机构8内时,双向双杆气缸81带动两个v形块82对盖子进行抓取。
[0022]
接着外部盖子上料机构下降进行让位,横向移动机构3带动滑动板4移动,从而带动盖子移动至筒体的正上方即下压机构的正下方,接着下压气缸51带动下压板52下降从而带动第一伸缩模块6下移即夹爪机构8上的盖子下移,双向双杆气缸81先松开,从而将盖子放置到筒体上,接着下压气缸51带动下压板52缩回,从而夹爪机构8在复位弹簧62的作用下上升,接着横向移动机构3带动夹爪机构8移至初始位继续抓料。
[0023]
此时第二伸缩模块7和压合板9位于筒体和盖子的正上方,下压气缸51再次带动下压板52伸出从而通过第二伸缩模块7带动压合板9将盖子和筒体压合,完成装配。
[0024]
上述实施例用于对本实用新型作进一步的说明,但并不将本实用新型局限于这些具体实施方式。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应理解为在本实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips