
 商标分类
商标分类  商标转让
商标转让 
一种有机大米包装后的自动装箱设备的制作方法
 2021-02-17 22:02:45|
2021-02-17 22:02:45| 206|
206| 起点商标网
起点商标网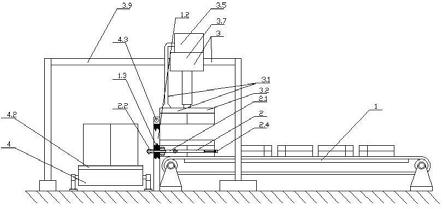
[0001]
本实用新型涉及有机大米加工设备领域,具体涉及一种有机大米包装后的自动装箱设备。
背景技术:
[0002]
现在有机大米在包装完毕后,需要将多袋包装大米进行装箱,现在的装箱一般采用手工装箱的方式进行装箱,这样装箱的速度比较的慢,这样人工的装箱速度影响公司的产能,同时工作人员的劳动强度比较大(一包大米10多斤,人工需要长期搬运并装箱),同时采用人工装箱的时候,当箱体比较深的时候,人工装箱极为的不便(需要人工搬着大米并伸到箱体内进行包装);同时在进行自动化搬运的时候,需要先将包装的大米码放整齐,这样才能进行装箱,这样在进行装箱的时候,仍然需要人工进行操作,工作人员的劳动强度比较的大。
[0003]
同时在进行摆放的时候,包装袋不是整齐的纵向排列的,当白装袋不是纵向整齐排列的时候,包装袋无法放入到包装箱内,这样需要工作人员整理整齐后放入到输送带上进行输送,这样无疑是增加了工作人员的劳动强度。
技术实现要素:
[0004]
针对上述现有技术的不足,本实用新型提出一种有机大米包装后的自动装箱设备,便于对包装后的大米进行自动包装,同时在进行包装的时候,通过自动的方式进行自动整理,这样便于将包装后的包装袋放入到箱体内,同时箱体采用自动移动的方式进行装箱,这样大米的自动装箱。
[0005]
为实现上述的目的,本实用新型的方案:一种有机大米包装后的自动装箱设备,包括输送机构、包装自动整理机构、转运机构与箱体移动机构,输送机构为包装袋输送带且在包装袋输送带的两侧设置有挡板,通过挡板防止包装大米离开包装袋输送带,在包装袋输送带的尾端设置有限位板,通过限位板将包装大米挡在包装袋输送带的末端;在限位板上固定有包装自动整理机构,包装自动整理机构包括摆动杆、整理气缸与抵紧气缸,其中摆动杆为两根,每根摆动杆铰接在限位板靠近包装袋输送带的侧面上且摆动杆位于限位板的两侧,两根摆动杆铰接点的距离与包装袋的长度一致,在限位板上开有与摆动杆位置相对应的槽体,每根摆动杆向后延伸并穿过限位板,在限位板上固定有两个整理气缸且两个整理气缸的缸体固定在限位板上,两个整理气缸的活塞杆分别固定在两个摆动杆的尾部,通过整理气缸的是摆动杆靠拢并对包装带进行定位,在每根摆动杆上通过铰接的方式固定有抵紧气缸,在每根摆动杆的顶端铰接有抵紧杆且摆动杆与敌紧杆的中段铰接,抵紧杆的一端位于两根摆动杆之间,另外一端位于摆动杆外且位于摆动杆外的一端与抵紧气缸的活塞杆铰接,通过抵紧气缸使包装袋靠拢进行定位;在包装自动整理机构上方设置有转运机构,其中转运机构包括负压吸附组件、升降组件与滑动组件,其中负压吸附组件包括固定板与负压头,其中在固定板的底部固定有嵌入到固定板底部的多个负压头,每个负压头通过管道
连接有负压泵,在固定板的顶部设置有滑动组件,在滑动组件与固定板之间设置有升降组件;限位板远离包装袋输送带的一侧设置有箱体移动机构,箱体移动机构包括箱体输送带与计量组件,其中箱体输送带与包装袋输送带相互垂直,在包装袋输送带上设置有多根等间距设置的隔条,通过隔条推动箱体在输送带上移动,在滑动组件上设置有计量机构,其中计量机构为红外线对射传感器,其中红外线对射传感器的发射器与接收器位于固定板的两侧且发射器与接收器的高度与包装袋平齐,当固定板吸附有包装袋并穿过红外线对射传感器的时候,会被红外线对射传感器检测到并计数,红外线对射传感器与控制器进行连接,通过控制器与箱体输送带进行连接,通过控制器控制箱体输送带的启动与停止。
[0006]
优选地,在固定板的底部设置有压力传感器,压力传感器与升降组件及负压泵进行连接,通过压力传感器控制升降组件的上升与下降与负压泵的启动与停止,升降组件为升降气缸,通过升降气缸使固定板实现上下移动,升降气缸的缸体固定在滑动组件上,滑动组件即为直线电机、滑动轨道,在保险带输送带的末端的上方设置有滑动轨道,滑动轨道向左延伸并位于箱体输送带的上方,滑动轨道的两端与地面之间设置有支撑架,在滑动轨道上设置有沿着滑动轨道移动的支撑架,升降气缸的缸体固定在直线电机上。
[0007]
与现有技术相比,本实用新型的优点在于:1、在包装袋输送到箱体旁边,并通过整理定位后通过吸附的方式将包装袋装入到箱体内,这样实现自动装箱;2、通过计量组件对包装袋进行计量,这样实现箱体的定量装入包装袋;3、设置的压力传感器触发上料,这样防止固定板过渡挤压包装带而引起的包装袋破裂。
附图说明
[0008]
图1为本实用新型的主视图。
[0009]
图2为本实用新型的俯视图。
[0010]
图3为本实用新型包装自动整理机构的示意图。
[0011]
图4为本实用新型包装自动整理机构对比示意图。
[0012]
图5为本实用新型固定板的剖视图。
[0013]
其中,1、输送机构,1.1、包装袋输送带,1.2、限位板,1.3、槽体,2、包装自动整理机构,2.1、摆动杆,2.2、整理气缸,2.3、抵紧气缸,2.4、抵紧杆,3、转运机构,3.1、负压吸附组件,3.2、固定板,3.3、压力传感器(型号为:ccps 18),3.4、负压头,3.5、负压泵,3.6、升降组件,3.7、滑动组件,3.8、直线电机,3.9、滑动轨道,4、箱体移动机构,4.1、包括箱体输送带,4.2、隔条,4.3、计量组件,4.4、红外线对射传感器(e18-8mnk)。
具体实施方式
[0014]
现结合附图,对本实用新型进一步的阐述。
[0015]
如图1-5所述,一种有机大米包装后的自动装箱设备,包括输送机构1、包装自动整理机构2、转运机构3与箱体移动机构4,输送机构1为包装袋输送带1.1且在包装袋输送带1.1的两侧设置有挡板(挡板通过橡胶制造而成且挡板通过胶水粘贴在包装袋输送带1.1的前后两侧面上),通过挡板防止包装大米离开包装袋输送带1.1,在包装袋输送带1.1的尾端地面通过预埋的方式固定有限位板1.2(限位板1.2的底部埋到地里),通过限位板1.2将包装大米挡在包装袋输送带1.1的末端,这样包装袋在触碰到限位板1.2的时候就停止向前输
送,同时包装袋的左侧端部抵在限位板1.2上;在限位板1.2上固定有包装自动整理机构2,包装自动整理机构2包括摆动杆2.1、整理气缸2.2与抵紧气缸2.3,其中摆动杆2.1为两根,每根摆动杆2.1铰接在限位板1.2靠近包装袋输送带1.1的侧面(即为限位板1.2的右侧面)上且摆动杆2.1位于限位板1.2的前、后两侧,两根摆动杆2.1铰接点的距离与包装袋的长度一致,在限位板1.2上开有与每根摆动杆2.1位置相对应的槽体1.3,每根摆动杆2.1向后延伸并穿过限位板1.2上的槽体1.3,在限位板1.2上通过铰接的方式固定有两个整理气缸2.2且两个整理气缸2.2的缸体铰接在限位板1.2上,两个整理气缸2.2的活塞杆分别铰接在两个摆动杆2.1的尾部(即为摆动杆2.1的左端),通过整理气缸2.2使两根摆动杆2.1靠拢并对包装带进行定位,这样现在包装袋的左右之间的间距,在每根摆动杆2.1的外侧上通过铰接的方式固定有抵紧气缸2.3,在每根摆动杆2.1的顶端铰接有抵紧杆2.4且摆动杆2.1与抵紧杆2.4的中段铰接,抵紧杆2.4的一端位于两根摆动杆2.1之间,另外一端位于摆动杆2.1外且位于摆动杆2.1外的一端与抵紧气缸2.3的活塞杆铰接,通过抵紧气缸2.3使包装袋靠拢进行定位,在进行定位的时候,当整理气缸2.2顶升的时候,两根摆动杆2.1向中间靠拢,在摆动杆2.1相互靠拢的时候,摆动杆2.1推动包装袋向中间滑动,当两根摆动杆2.1池形成横向的时候,两根摆动杆2.1之间的间距为包装袋的长度,在摆动摆动杆2.1向内摆动的时候,抵紧气缸2.3顶升使抵紧杆2.4位于两根摆动杆2.1之间的一端向左运动,由于限位板1.2纵向设置的,包装袋通过抵紧杆2.4抵紧后,包装袋被抵紧杆2.4摆动中纵向放置且包装袋靠近限位板1.2,这样通过抵紧杆2.4与摆动完成对包装袋的定位,这样便于将包装袋放入到箱体内;在包装自动整理机构2上方设置有转运机构3,其中转运机构3包括负压吸附组件3.1、升降组件3.6与滑动组件3.7,其中负压吸附组件3.1包括固定板3.2与负压头3.4,其中在固定板3.2的底部固定有嵌入到固定板3.2底部的多个负压头3.4且负压头3.4的底部与固定板3.2的底部平齐,每个负压头3.4通过管道连接有负压泵3.5且负压泵3.5通过螺栓固定在滑动组件3.7的顶部,其中固定板3.2内部空心且每个负压头3.4与固定板3.2的空心处连通,负压泵3.5通过管道与固定板3.2的空心处进行连通,负压泵3.5通过固定板3.2的空心处将负压分布到每个负压头3.4上,通过负压头3.4将包装袋吸附起来,在负压头3.4将包装袋吸附上来的时候,摆动杆2.1与抵紧杆2.4均向外移动并张开,在固定板3.2的顶部设置滑动组件3.7,在滑动组件3.7与固定板3.2之间设置有升降组件3.6,固定板3.2通过焊接的方式固定在升降组件3.6上,升降组件3.6的顶部通过焊接的方式固定在滑动组件3.7上;限位板1.2远离包装袋输送带1.1一侧(即为限位板1.2的左侧)的地面上设置有箱体移动机构4,箱体移动机构4包括箱体输送带4.1与计量组件4.3,其中箱体输送带与包装袋输送带1.1相互垂直(包装袋输送带1.1横向设置,箱体输送带纵向设置),在包装袋输送带1.1上通过螺钉固定有多根等间距设置的隔条4.2(每根隔条4.2横向设置),通过隔条4.2推动箱体在输送带上移动,在滑动组件3.7上设置有计量机构,其中计量机构为红外线对射传感器4.4,红外线对射传感器4.4通过焊接的方式固定在限位板1.2的顶部(限位板1.2的前后两侧通过焊接的方式固定有向上凸起的块,其中红外线对射传感器4.4的发射器与接收器分别固定在限位块凸起的块上),其中红外线对射传感器4.4的发射器与接收器位于固定板3.2的两侧且发射器与接收器的高度与包装袋平齐,当固定板3.2吸附有包装袋并穿过红外线对射传感器4.4的时候,会被红外线对射传感器4.4检测到并计数,红外线对射传感器4.4与控制器进行连接,通过控制器与箱体输送带进行连接,通过控制器控制箱体输送带的启动与
停止。
[0016]
在固定板3.2的底部通过胶水粘贴的时候固定有压力传感器3.3且压力传感器3.3突出固定板3.2的底部一毫米,压力传感器3.3与升降组件3.6及负压泵3.5进行连接,通过压力传感器3.3控制升降组件3.6的上升与下降与负压泵3.5的启动与停止,当固定板3.2向下压的时候,压力传感器3.3先检测到压力,压力传感器3.3连接有控制器(单片机89-c51),控制器与升降组件3.6与负压泵3.5通过导线进行连接,控制器控制负压泵3.5启动,通过升降组件3.6上升,这样将包装袋吸附到固定板3.2上,同时升降组件3.6将固定板3.2上升并使包装袋底部高于限位板1.2,通过滑动组件3.7带动固定板3.2向左移动到箱体输送带的上方,当滑动组件3.7滑动到末端的时候,包装袋位于箱体的正上方,同时升降组件3.6下降并将包装袋放入到箱体内,让通过升降组件3.6与滑动组件3.7使固定板3.2回位到包装袋输送带1.1的上方,升降组件3.6为升降气缸,通过升降气缸使固定板3.2实现上下移动,升降气缸的缸体固定通过焊接的方式固定在滑动组件3.7下方,滑动组件3.7即为直线电机3.8与滑动轨道3.9,在包装袋输送带1.1的末端的上方设置有滑动轨道3.9,滑动轨道3.9向左延伸并位于箱体输送带的上方,滑动轨道3.9的两端与地面之间焊接有支撑架且支撑架通过螺栓固定在地面上,在滑动轨道3.9上设置有沿着滑动轨道3.9移动的直线电机3.8,通过直线电机3.8在滑动轨道3.9上左右移动来实现包装袋的转运,升降气缸的缸体通过焊接的方式固定在直线电机3.8上。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips