
 商标分类
商标分类  商标转让
商标转让 
一种机械手和置料传送装置的制作方法
 2021-02-17 20:02:40|
2021-02-17 20:02:40| 51|
51| 起点商标网
起点商标网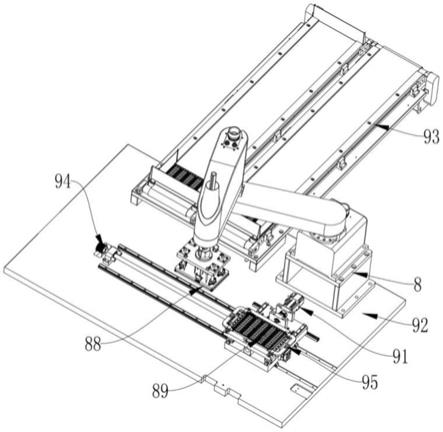
[0001]
本实用新型涉及机械手技术领域,尤其涉及一种机械手和置料传送装置。
背景技术:
[0002]
现有的机械手为直接将工件进行夹持,再将工件传送走;而对于尺寸细小的工件只能是先将工件进行打包,再利用机械手将装料盘夹持传出;而现有技术只,机械手与工件的打包为分开,需先将工件的公盘与母盘组装后,再进行夹取,多出了部分的工序。
技术实现要素:
[0003]
本实用新型的目的在于提出一种机械手,其夹持基架安装于所述机械手主体,用于连接所述接料公盘;接料公盘与所述接料母盘配合时,所述夹持卡接件卡接于所述接料母盘
[0004]
本实用新型还提出一种置料传送装置,包括:x轴驱动组件、接料移动底板、机械手和送出机构。
[0005]
为达此目的,本实用新型采用以下技术方案:
[0006]
一种机械手,用于夹取接料盘,包括:机械手主体和夹持组件;
[0007]
所述夹持组件可位置调节地安装于所述机械手主体;所述接料盘包括:接料公盘和接料母盘;
[0008]
所述接料公盘可拆卸地连接所述接料母盘;
[0009]
所述夹持组件包括:夹持基架、夹持驱动器和夹持卡接件;
[0010]
所述夹持基架,安装于所述机械手主体,用于连接所述接料公盘;所述夹持驱动器安装于所述夹持基架,其输出端连接所述夹持卡接件,用于驱动所述夹持卡接件移动;
[0011]
所述接料公盘与所述接料母盘配合时,所述夹持卡接件卡接于所述接料母盘。
[0012]
优选地,所述夹持驱动器用于驱动所述夹持卡接件水平移动,使所述夹持卡接件的一端卡接于所述接料母盘。
[0013]
优选地,所述夹持卡接件包括:夹持竖直臂和夹持水平臂;
[0014]
所述夹持竖直臂的一端连接所述夹持驱动器的输出端,其另一端连接所述夹持水平臂;所述夹持水平臂用于托起所述接料母盘。
[0015]
优选地,还包括:夹持定位组件;
[0016]
所述夹持定位组件包括:夹持定位针和夹持定位驱动器;
[0017]
所述夹持基架包括:固定夹持基架和活动夹持基架;
[0018]
所述固定夹持基架连接于所述机械手主体;所述活动夹持基架,可升降地安装于连接于所述固定夹持基架,用于连接所述接料公盘;所述夹持定位驱动器安装于所述活动夹持基架,其输出端连接所述固定夹持基架,用于驱动所述活动夹持基架与所述固定夹持基架产生相对位移;
[0019]
所述夹持定位针安装于所述固定夹持基架;所述接料公盘设有盘身定位孔;所述
活动夹持基架活动后,所述夹持定位针伸入于所述盘身定位孔内。
[0020]
优选地,所述接料盘用于放置热保护器。
[0021]
一种置料传送装置,包括:x轴驱动组件、接料移动底板、机械手和送出机构;
[0022]
所述机械手为上述的机械手;
[0023]
所述接料母盘设置于所述x轴驱动组件;所述x轴驱动组件用于驱动所述接料母盘向所述机械手方向移动;所述机械手和所述送出机构安装于所述接料移动底板;所述机械手用于将所述接料母盘移动至所述送出机构;所述送出机构用于将所述接料母盘向所述送出机构的输出口方向传送。
[0024]
优选地,还包括:y轴驱动组件;
[0025]
所述x轴驱动组件可移动地安装于所述y轴驱动组件;所述y轴驱动组件可移动地安装于所述接料移动底板;
[0026]
所述x轴驱动组件包括:x轴驱动器和x轴移动板;
[0027]
所述接料母盘设置于所述x轴移动板;所述x轴驱动器安装于所述y轴驱动组件,其输出端连接所述x轴移动板,用于驱动所述x轴移动板移动;
[0028]
所述y轴驱动组件包括:y轴移动板和y轴驱动器;
[0029]
所述x轴驱动器安装于所述y轴移动板;所述y轴驱动器安装于所述接料移动底板,其输出端连接于所述y轴移动板,用于驱动所述y轴移动板移动。
[0030]
优选地,还包括:夹具件;
[0031]
所述夹具件安装于所述x轴移动板,用于夹持所述接料母盘。
[0032]
优选地,所述x轴驱动器包括:x轴驱动座、x轴驱动电机、x轴螺杆和x轴螺纹座;
[0033]
所述x轴驱动座安装于所述y轴移动板;所述x轴驱动电机的固定端安装于所述x轴驱动座,其输出端连接所述x轴螺杆,用于驱动所述x轴螺杆转动;所述x轴螺纹座通过螺纹结构配合于所述x轴螺杆,并连接所述x轴移动板。
[0034]
优选地,所述y轴驱动器包括:y轴驱动座、y轴驱动电机、y轴螺杆和y轴螺纹座;
[0035]
所述y轴驱动座安装于所述接料移动底板;所述y轴驱动电机的固定端安装于所述y轴驱动座,其输出端连接所述y轴螺杆,用于驱动所述y轴螺杆转动;所述y轴螺纹座通过螺纹结构配合于所述y轴螺杆,并连接所述y轴移动板。
[0036]
本实用新型的有益效果:
[0037]
本机械手用于对放置工件的接料盘进行夹持,使接料公盘与接料母盘配合,达到将工件打包后转移的功能,解决了现有技术中,机械手夹取小型工件的工序繁琐的特点。
附图说明
[0038]
图1是置料传送装置的结构示意图;
[0039]
图2是机械手、x轴驱动组件和y轴驱动组件的结构示意图;
[0040]
图3是夹持组件的的结构示意图。
[0041]
其中:
[0042]
x轴驱动组件91、接料移动底板92、机械手8、送出机构93;y轴驱动组件94;夹具件95;
[0043]
机械手主体81、夹持组件82;夹持定位组件83;
[0044]
夹持基架821、夹持驱动器822、夹持卡接件823;
[0045]
夹持竖直臂8231、夹持水平臂8232;
[0046]
夹持定位针831、夹持定位驱动器832;活动架导向柱833;
[0047]
固定夹持基架8211、活动夹持基架8212;
[0048]
接料公盘88、接料母盘89;
[0049]
x轴驱动器911、x轴移动板912;y轴移动板941、y轴驱动器942;
[0050]
x轴驱动座9111、x轴驱动电机9112、x轴螺杆9113;
[0051]
y轴驱动座9421、y轴驱动电机9422、y轴螺杆9423。
具体实施方式
[0052]
下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
[0053]
一种机械手,用于夹取接料盘,包括:机械手主体81和夹持组件82;
[0054]
所述夹持组件82可位置调节地安装于所述机械手主体81;所述接料盘包括:接料公盘88和接料母盘89;
[0055]
所述接料公盘88可拆卸地连接所述接料母盘89;
[0056]
所述夹持组件82包括:夹持基架821、夹持驱动器822和夹持卡接件823;
[0057]
所述夹持基架821,安装于所述机械手主体81,用于连接所述接料公盘88;所述夹持驱动器822安装于所述夹持基架821,其输出端连接所述夹持卡接件823,用于驱动所述夹持卡接件823移动;
[0058]
所述接料公盘88与所述接料母盘89配合时,所述夹持卡接件823卡接于所述接料母盘89。
[0059]
本机械手用于对放置工件的接料盘进行夹持,使接料公盘88与接料母盘89配合,达到将工件打包后转移的功能,解决了现有技术中,机械手夹取小型工件的工序繁琐的特点。
[0060]
具体地,机械手主体81为现有机械人手臂代替,其具有多轴传动的结构,使夹持组件82将接料盘传至任意位置;开始时,夹持基架821的底部可连接接料公盘88;当接料母盘89完成工件的上料后,机械手主体81会带动夹持基架821,将接料公盘88配合于接料母盘89,使接料公盘88和接料母盘89配合成接料盘;此时,启动夹持驱动器822,驱动夹持卡接件823移动,使夹持卡接件823卡接于接料母盘89;夹持基架821带动接料盘移动。夹持驱动器822为公知的水平驱动器,如气缸,或螺杆与电机的配合。
[0061]
优选地,所述夹持驱动器822用于驱动所述夹持卡接件823水平移动,使所述夹持卡接件823的一端卡接于所述接料母盘89。
[0062]
当位于夹持基架821的接料公盘88需要与接料母盘89配合时,夹持驱动器822驱动夹持卡接件823水平移动,将夹持卡接件823推出,使接料公盘88与接料母盘89有足够的空间配合;而当接料公盘88与接料母盘89配合完全后,夹持驱动器822驱动夹持卡接件823复位,使夹持卡接件823卡接于接料母盘89,托起并支撑住接料母盘89,防止接料母盘89在转移的过程中下跌。
[0063]
优选地,所述夹持卡接件823包括:夹持竖直臂8231和夹持水平臂8232;
[0064]
所述夹持竖直臂8231的一端连接所述夹持驱动器822的输出端,其另一端连接所
述夹持水平臂8232;所述夹持水平臂8232用于托起所述接料母盘89。
[0065]
夹持卡接件823呈l型臂,l型臂的夹持竖直臂8231能支撑住夹持水平臂8232,使夹持水平臂8232能托起接料母盘89。如夹持水平臂8232能伸入于接料母盘89的下方,将接料母盘89托起;优选地,当夹持水平臂8232在夹持驱动器822的驱动作用下,其会水平移动至接料母盘89的下方,夹持水平臂8232的上表面接触于接料母盘89的下底面,将接料母盘89托起,达到稳定接料盘移动的效果。
[0066]
优选地,还包括:夹持定位组件83;
[0067]
所述夹持定位组件83包括:夹持定位针831和夹持定位驱动器832;
[0068]
所述夹持基架821包括:固定夹持基架8211和活动夹持基架8212;
[0069]
所述固定夹持基架8211连接于所述机械手主体81;所述活动夹持基架8212,可升降地安装于连接于所述固定夹持基架8211,用于连接所述接料公盘88;所述夹持定位驱动器832安装于所述活动夹持基架8212,其输出端连接所述固定夹持基架8211,用于驱动所述活动夹持基架8212与所述固定夹持基架8211产生相对位移;
[0070]
所述夹持定位针831安装于所述固定夹持基架8211;所述接料公盘88设有盘身定位孔;所述活动夹持基架8212活动后,所述夹持定位针831伸入于所述盘身定位孔内。
[0071]
夹持定位组件83用于对接料盘进行定位,提高夹持基架821与接料公盘88的连接准确性;本机械手,其夹持基架821连接的接料公盘88可设计成可拆卸或不可拆卸;
[0072]
当接料公盘88为不可拆卸时,接料公盘88用于与接料母盘89配合后,接料公盘88在配合结构下带动接料母盘89移动,直接将带有工件的接料母盘89送至送出机构93,接料公盘88保留于夹持基架821,机械手主体81无需控制夹持基架821夹取接料公盘88。具体地,接料公盘88与接料母盘89配合后,夹持定位驱动器832的驱动作用下,活动夹持基架8212和活动夹持基架8212靠近,夹持定位针831伸入于接料公盘88内的盘身定位孔内;夹持定位针831与接料母盘89接触,将接料母盘89与接料公盘88分离。
[0073]
当接料公盘88为可拆卸连接于活动夹持基架8212时,接料公盘88与接料母盘89配合后形成接料盘,活动夹持基架8212直接将接料盘送至送出机构93,活动夹持基架8212需重新夹取接料公盘88;每次活动夹持基架8212安装接料公盘88为时,夹持定位驱动器832的驱动作用下,活动夹持基架8212和活动夹持基架8212靠近,夹持定位针831伸入并固定于接料公盘88内的盘身定位孔内,达到固定接料公盘88的效果,接料公盘88再与接料母盘89配合。
[0074]
为了提高固定夹持基架8211和活动夹持基架8212之间的移动稳定性,亦可在固定夹持基架8211设置活动架导向柱833,活动夹持基架8212可活动地安装于活动架导向柱833,提高活动夹持基架8212的定向移动作用。
[0075]
夹持卡接件823可具有弹性。
[0076]
优选地,所述接料盘用于放置热保护器。
[0077]
本机械手用于热保护器的领域,在热保护器完成在接料盘的装盘后,机械手能将接料盘传至送出机构93,达到为热保护器的打包提供移动作用。
[0078]
一种置料传送装置,包括:x轴驱动组件91、接料移动底板92、机械手8和送出机构93;
[0079]
所述机械手为上述任意实施例的机械手;
[0080]
所述接料母盘89设置于所述x轴驱动组件91;所述x轴驱动组件91用于驱动所述接料母盘89向所述机械手8方向移动;所述机械手8和所述送出机构93安装于所述接料移动底板92;所述机械手8用于将所述接料母盘89移动至所述送出机构93;所述送出机构93用于将所述接料母盘89向所述送出机构93的输出口方向传送。
[0081]
x轴驱动组件91用于传送接料母盘89,使接料母盘89传送至靠近机械手的位置,机械手将接料盘夹住,并将接料盘传至送出机构93,由送出机构93送至下一道工序,实现了工件或热保护器的全自动打包的效果。
[0082]
其中,x轴驱动组件91可为公知的水平驱动装置代替,只要使接料母盘89移动至靠近机械手的位置即可。
[0083]
送出机构93为公知的传送机构,只需要将接料盘水平传送即可,如公知的传送带与传送轮之间的配合;通过电机驱动传送轮转动,传送带的两端分别连接传送轮,电机驱动下,传送带转动,带动接料盘移动。
[0084]
优选地,还包括:y轴驱动组件94;
[0085]
所述x轴驱动组件91可移动地安装于所述y轴驱动组件94;所述y轴驱动组件94可移动地安装于所述接料移动底板92;
[0086]
所述x轴驱动组件91包括:x轴驱动器911和x轴移动板912;
[0087]
所述接料母盘89设置于所述x轴移动板912;所述x轴驱动器911安装于所述y轴驱动组件94,其输出端连接所述x轴移动板912,用于驱动所述x轴移动板912移动;
[0088]
所述y轴驱动组件94包括:y轴移动板941和y轴驱动器942;
[0089]
所述x轴驱动器911安装于所述y轴移动板941;所述y轴驱动器942安装于所述接料移动底板92,其输出端连接于所述y轴移动板941,用于驱动所述y轴移动板941移动。
[0090]
x轴驱动组件91用于驱动接料母盘89向x轴移动,y轴驱动组件94用于驱动x轴驱动组件91向y轴移动;x轴驱动组件91与y轴驱动组件94配合,能达到调节接料母盘89的x轴和y轴方向移动,实现了接料母盘89能在多方位接料,提高接料母盘89与机械手连接的灵活性。
[0091]
优选地,还包括:夹具件95;
[0092]
所述夹具件95安装于所述x轴移动板912,用于夹持所述接料母盘89。
[0093]
夹具件95用于夹持接料母盘89,使接料母盘89的位置稳定,在传送的过程中不会晃动,提高了接料母盘89的接料准确度。
[0094]
优选地,所述x轴驱动器911包括:x轴驱动座9111、x轴驱动电机9112、x轴螺杆9113和x轴螺纹座;
[0095]
所述x轴驱动座9111安装于所述y轴移动板941;所述x轴驱动电机9112的固定端安装于所述x轴驱动座9111,其输出端连接所述x轴螺杆9113,用于驱动所述x轴螺杆9113转动;所述x轴螺纹座通过螺纹结构配合于所述x轴螺杆9113,并连接所述x轴移动板912。
[0096]
x轴驱动电机9112的输出端转动,并带动x轴螺杆9113转动,由于x轴螺纹座(未图视)通过螺纹结构与x轴螺杆9113配合;因此x轴螺纹座会移动,并带动x轴移动板912移动,达到驱动接料母盘89向x轴移动的效果。
[0097]
进一步地,为使x轴移动板912移动更流畅,x轴驱动器911包括:x轴滑块9114和x轴轨道9115;所述x轴滑块和x轴轨道两者中,其中的一者安装于所述x轴移动板912,另一者安装于所述y轴移动板941;所述x轴滑块可滑动地安装于所述x轴轨道。
[0098]
优选地,所述y轴驱动器942包括:y轴驱动座9421、y轴驱动电机9422、y轴螺杆9423和y轴螺纹座;
[0099]
所述y轴驱动座9421安装于所述接料移动底板92;所述y轴驱动电机9422的固定端安装于所述y轴驱动座9421,其输出端连接所述y轴螺杆9423,用于驱动所述y轴螺杆9423转动;所述y轴螺纹座通过螺纹结构配合于所述y轴螺杆9423,并连接所述y轴移动板941。
[0100]
y轴驱动电机9422的输出端转动,并带动y轴螺杆9423转动,由于y轴螺纹座(未图视)通过螺纹结构与y轴螺杆9423配合;因此y轴螺纹座会移动,并带动y轴移动板941移动,达到驱动x轴驱动组件91向y轴移动的效果,使接料母盘89亦向y轴移动。
[0101]
进一步地,为使y轴移动板941移动更流畅,y轴驱动器942包括:y轴滑块9424和y轴轨道9425;所述y轴滑块和y轴轨道两者中,其中的一者安装于所述y轴移动板941,另一者安装于所述y轴移动板941;所述y轴滑块可滑动地安装于所述y轴轨道。
[0102]
以上结合具体实施例描述了本实用新型的技术原理。这些描述只是为了解释本实用新型的原理,而不能以任何方式解释为对本实用新型保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本实用新型的其它具体实施方式,这些方式都将落入本实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 机械手
 热门咨询
热门咨询




tips