
 商标分类
商标分类  商标转让
商标转让 
一种自动调节张力传送系统的制作方法
 2021-02-17 16:02:09|
2021-02-17 16:02:09| 282|
282| 起点商标网
起点商标网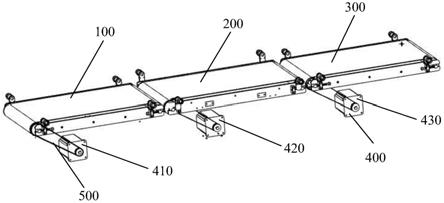
[0001]
本实用新型涉及一种传送系统,具体涉及一种自动调节张力传送系统。
背景技术:
[0002]
目前市场上物体传送系统都是人工调节皮带的松紧的,系统长时间工作会因皮带老化而导致皮带的松弛,从而影响传送台的正常工作。
[0003]
为了解决上述问题,我们做出了一系列改进。
技术实现要素:
[0004]
本实用新型的目的在于,提供一种自动调节张力传送系统,以克服现有技术所存在的上述缺点和不足。
[0005]
一种自动调节张力传送系统,包括:物体传送台、第一称重传送台、第二称重传送台、传送电机和电机皮带,所述物体传送台、第一称重传送台和第二称重传送台依次排列连接,所述传送电机通过电机皮带与物体传送台、第一称重传送台和第二称重传送台连接;
[0006]
其中,所述物体传送台、第一称重传送台和第二称重传送台的结构相同,包括:传送台、第一旋转滚轴、第二旋转滚轴、第一液压驱动轴、第二液压驱动轴、第三液压驱动轴、第四液压驱动轴、第一张力传感器、第二张力传感器、第三张力传感器、第四张力传感器、第一液压驱动泵、第二液压驱动泵、第三液压驱动泵、第四液压驱动泵、第一驱动控制器和第二驱动控制器,所述第一旋转滚轴和第二旋转滚轴与传送台两端连接,所述第一液压驱动轴与传送台后侧一端连接,所述第二液压驱动轴与传送台后侧另一端连接,所述第三液压驱动轴与传送台前侧一端连接,所述第四液压驱动轴与传送台前侧另一端连接,所述第一张力传感器与第一液压驱动轴连接,所述第二张力传感器与第二液压驱动轴连接,所述第三张力传感器与第三液压驱动轴连接,所述第四张力传感器与第四液压驱动轴连接,所述第一液压驱动泵与第一液压驱动轴连接,所述第二液压驱动泵与第二液压驱动轴连接,所述第三液压驱动泵与第三液压驱动轴连接,所述第四液压驱动泵与第四液压驱动轴连接,所述第一驱动控制器与第一液压驱动泵和第二液压驱动泵中间连接,所述第二驱动控制器与第三液压驱动泵和第四液压驱动泵中间连接。
[0007]
进一步,所述传送电机包括:第一传送电机、第二传送电机和第三传送电机,所述第一传送电机通过电机皮带与物体传送台连接,所述第二传送电机通过电机皮带与第一称重传送台连接,所述第三传送电机通过电机皮带与第二称重传送台连接。
[0008]
本实用新型的有益效果:
[0009]
本实用新型与传统技术相比,通过增设驱动控制器,将张力值预设到控制器中,通过张力传感器来判断当前力的大小,从而达到自动调节张力大小的结果,整个过程中不需要人的控制和参与。
附图说明:
[0010]
图1为本实用新型的结构示意图。
[0011]
图2为本实用新型的后视图。
[0012]
图3为本实用新型的前视图。
[0013]
附图标记:
[0014]
物体传送台100、第一称重传送台200和第二称重传送台300。
[0015]
传送台110、第一旋转滚轴120、第二旋转滚轴130、第一液压驱动轴140、第二液压驱动轴150、第三液压驱动轴160、第四液压驱动轴170、第一张力传感器180、第二张力传感器190、第三张力传感器1100、第四张力传感器1200、第一液压驱动泵1300、第二液压驱动泵1400、第三液压驱动泵1500、第四液压驱动泵1600、第一驱动控制器1700和第二驱动控制器1800。
[0016]
传送电机400、第一传送电机410、第二传送电机420、第三传送电机430和电机皮带500。
具体实施方式
[0017]
以下结合具体实施例,对本实用新型作进步说明。应理解,以下实施例仅用于说明本实用新型而非用于限定本实用新型的范围。
[0018]
实施例1
[0019]
图1为本实用新型的结构示意图。图2为本实用新型的后视图。图3为本实用新型的前视图。
[0020]
如图1-3所示,一种自动调节张力传送系统,包括:物体传送台100、第一称重传送台200、第二称重传送台300、传送电机400和电机皮带500,物体传送台100、第一称重传送台200和第二称重传送台300依次排列连接,传送电机400通过电机皮带500与物体传送100、第一称重传送台200和第二称重传送台300连接;
[0021]
其中,物体传送台100、第一称重传送台200和第二称重传送台300的结构相同,包括:传送台110、第一旋转滚轴120、第二旋转滚轴130、第一液压驱动轴140、第二液压驱动轴150、第三液压驱动轴160、第四液压驱动轴170、第一张力传感器180、第二张力传感器190、第三张力传感器1100、第四张力传感器1200、第一液压驱动泵1300、第二液压驱动泵1400、第三液压驱动泵1500、第四液压驱动泵1600、第一驱动控制器1700和第二驱动控制器1800,第一旋转滚轴120和第二旋转滚轴130与传送台110两端连接,第一液压驱动轴140与传送台110后侧一端连接,第二液压驱动轴150与传送台110后侧另一端连接,第三液压驱动轴160与传送台110前侧一端连接,第四液压驱动轴170与传送台110前侧另一端连接,第一张力传感器180与第一液压驱动轴140连接,第二张力传感器190与第二液压驱动轴150连接,第三张力传感器1100与第三液压驱动轴160连接,第四张力传感器1200与第四液压驱动轴170连接,第一液压驱动泵1300与第一液压驱动轴140连接,第二液压驱动泵1400与第二液压驱动轴150连接,第三液压驱动泵1500与第三液压驱动轴160连接,第四液压驱动泵1600与第四液压驱动轴170连接,第一驱动控制器1700与第一液压驱动泵1300和第二液压驱动泵1400中间连接,第二驱动控制器1800与第三液压驱动泵1500和第四液压驱动泵1600中间连接。
[0022]
传送电机400包括:第一传送电机410、第二传送电机420和第三传送电机430,第一
传送电机410通过电机皮带500与物体传送台100连接,第二传送电机420通过电机皮带500与第一称重传送台200连接,第三传送电机430通过电机皮带500与第二称重传送台300连接。
[0023]
本实用新型的工作原理是,在传送台110长时间的工作后,传送皮带会因为老化而变得松弛,此时可以将张力值设定到第一驱动控制器1700和第二驱动控制器1800中,当第一张力传感器180或第二张力传感器190检测到皮带的张力小于预设的张力值时,控制器会驱动第一液压驱动泵1300或第二液压驱动泵1400从而驱动第一液压驱动轴140或第二液压驱动轴150,达到加大张力的效果;当第一张力传感器180或第二张力传感器190检测到皮带的张力大于预设的张力值时,控制器会控制第一液压驱动泵1300或第二液压驱动泵1400从而控制第一液压驱动轴140或第二液压驱动轴150,达到减小张力的效果。本实用新型通过增设驱动控制器,将张力值预设到控制器中,通过张力传感器来判断当前力的大小,从而达到自动调节张力大小的结果,整个过程中不需要人的控制和参与。
[0024]
以上对本实用新型的具体实施方式进行了说明,但本实用新型并不以此为限,只要不脱离本实用新型的宗旨,本实用新型还可以有各种变化。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips