
 商标分类
商标分类  商标转让
商标转让 
致动器控制布置的制作方法
 2021-02-13 19:02:02|
2021-02-13 19:02:02| 141|
141| 起点商标网
起点商标网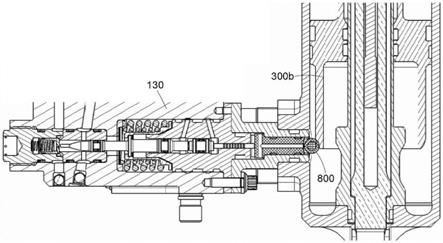
[0001]
本公开涉及用于控制液压致动器以便将扰流片定位在飞机中的阀布置。
背景技术:
[0002]
液压致动器有许多应用,特别是在控制可移动部件的移动方面。在飞机中,许多可移动部件和表面借助于液压致动器而移动。
[0003]
一般而言,液压致动器包括圆柱形壳体,在所述圆柱形壳体中安装有可轴向移动的活塞杆。所述杆的头部在壳体内部将壳体分成两个腔室,每个腔室具有流体端口,可以经由所述流体端口将加压流体注入腔室中或者使低压流体离开腔室,以便改变活塞头部两侧的两个腔室中的相对压力,从而使活塞相对于壳体移动。从壳体伸出的活塞杆的自由端附接到将要移动的部件或表面。液压流体经由壳体中的端口从与致动器壳体的内部流体连通的液压流体供应源提供给致动器,以使活塞杆伸出壳体,或者从壳体中抽出液压流体以使活塞杆回缩回壳体中。活塞杆的移动通过响应于控制信号施加到致动器的流体的方向或/和压力确定。
[0004]
当活塞杆相对于壳体移动时,活塞杆所附接到的可移动部件或表面将相应地移动。
[0005]
为了允许杆的伸展和杆的回缩,提供了阀以将移动设置为伸展或回缩。所述阀可以是伺服阀,更具体地是电动液压伺服阀(ehsv)。所述阀定位在液压流体供应源与致动器之间,并且可响应于电控制信号在第一位置与第二位置之间移动,在所述第一位置中,高压流体从供应源流入致动器壳体的一个腔室中并且低压流体从另一个腔室离开,在所述第二位置中,高压流体被注入另一个腔室中并且从致动器壳体的第一腔室中抽出。阀还可以具有中间或关闭位置,在所述位置中既不将流体供应到致动器壳体,也不从致动器壳体抽出流体。
[0006]
由ehsv控制的液压致动器的一种特定应用是控制飞机的机翼上的扰流片的移动。扰流片是安装在飞机机翼上位于襟翼后方的可移动表面。当飞机巡航时,襟翼和扰流片均沿机翼平放。为了降低飞机速度,将扰流片相对于机翼向上升高。
[0007]
扰流片的移动是由如上所述伸展的液压致动器引起的。
[0008]
如果在扰流片伸展时失去电力,则扰流片可能会施加过多的阻力。因此,已知系统会在失去电力的情况下将扰流片回缩到其在壳体中的“零”位置。通常,这是借助于将ehsv偏置到如下阀位置而进行,在所述阀位置中,高压流体被提供到活塞头部的活塞杆侧的腔室,使得所述头部的所述侧上的压力大于另一腔室中的压力,从而使活塞回缩到壳体中。这将在下文进一步描述。
[0009]
常规地,壳体内部的机械止动件将活塞杆停留在零位置处。
[0010]
如果存在液压动力损失,扰流片控制也可能出现问题。在此,防止致动器伸展的解决方案是ehsv与致动器之间的抗伸展阀,当液压压力降至预定压力(通常为给定“失速”压力的1.2倍)以下时,所述抗伸展阀会切换到压力释放位置。同样,这将在下文进一步描述。
[0011]
如果扰流片伸展并且压力损失,则扰流片将因气动力负荷而回缩,并且将逐渐下降以与机翼表面对齐,直到达到零铰接位置为止。重要的是将扰流片保持在此位置中以防止假性伸展。
[0012]
大多数飞机都具有使用致动器杆的正冲程(即,用于杆的伸展以提升扰流片)来操作的扰流片。致动器的冲程介于壳体中的“零”位置与伸展位置之间,并且控制系统被偏置以使杆返回零位置。
[0013]
最近,一些飞机在扰流片中加入了使用活塞杆的负冲程(即,比零位置更进一步返回壳体中,或者换句话说,沿与在正冲程中移动以用于使杆伸展的方向相反的方向从零位置移动的冲程)的“下垂”功能。
[0014]
下垂功能用于相对于机翼降低扰流片,(例如)以用于高提升操纵,或者如果襟翼伸展则关闭襟翼与扰流片之间的较大气隙。在ep19305167和ep19305168.7中描述了下垂。
[0015]
在扰流片和襟翼的运动范围的重叠区域中存在问题。例如,如果失去驱动扰流片的电力,则扰流片将在自身重量下或在来自ehsv偏置的压力下,在未被致动器驱动的情况下压靠在襟翼上,因此如果需要回缩则会妨碍襟翼的移动。在液压故障的情况下,抗伸展阀将被启动,然后,襟翼将克服抗伸展阈值,而能够推动扰流片并且因此返回其中间位置。
[0016]
然而,发明人已经发现需要提供允许扰流片下垂(即,负冲程)同时在电气故障和液压故障的情况下防止扰流片和襟翼妨碍彼此的阀和活塞组件。
技术实现要素:
[0017]
本公开提供了一种致动器控制布置,所述致动器控制布置包括:液压致动器,所述液压致动器具有壳体和活塞杆,所述活塞杆能够响应于向所述活塞杆施加压力在所述壳体内相对于所述壳体于中间位置、回缩位置与伸展位置之间轴向移动;所述布置还包括止回阀,所述止回阀能够在第一位置与第二位置之间移动,所述第一位置在压力源与所述致动器之间提供流动路径,在所述第二位置中,所述流动路径被封闭;并且所述布置的特征在于所述活塞杆与所述止回阀之间的机械连杆,所述机械连杆响应于所述活塞杆沿负冲程方向经过预定的回缩位置而致动,以将所述止回阀设置到所述第一位置。
[0018]
所述止回阀优选地借助于弹簧而偏置到所述第二位置,并且包括被布置成接收来自压力源的压力输入的第一端口以及被布置成接收来自所述机械连杆的机械输入的第二端口,由此所述压力输入或所述机械输入足以克服所述弹簧的力以使所述止回阀移动到所述第一位置。所述第一端口可以包括两个压力端口,一个压力端口用于接收来自高压源的高压,并且另一个压力端口用于在所述致动器回缩时接收来自所述致动器的压力。
[0019]
所述机械连杆可以包括在负冲程中沿活塞头部的行进路径伸展到所述壳体中的突出部或倒角等,由此在所述预定的回缩位置处,所述活塞头部推动所述机械连杆以将所述机械输入施加到所述止回阀。
[0020]
所述布置优选地还包括在所述压力源与所述致动器之间的电动液压伺服阀(ehsv),以响应于电控制信号来控制加压流体到所述致动器的方向。所述ehsv优选地能够在第一位置和第二位置之间移动,在所述第一位置中,高压流体被从所述流体源引导到所述致动器的第一腔室以使所述活塞杆伸展,凭借所述第二位置,高压流体被引导到所述致
动器的第二腔室以使所述活塞杆相对于所述壳体回缩。
[0021]
所述ehsv的默认位置优选为中间位置。
[0022]
优选地,电磁阀被控制成响应于所述电控制信号而占据第一位置或第二位置,由此当所述电磁阀处于所述第一位置时,高压被提供给所述止回阀的所述第一端口以迫使所述止回阀到达所述第一位置,并且在所述第二位置中,为流体提供从所述止回阀到低压贮存器的流动路径。
[0023]
以上任何特征均可以按任何组合形式一起使用。
附图说明
[0024]
现在将仅通过实例并参考附图来描述优选实施方案。
[0025]
图1是常规致动器控制阀布置的示意图。
[0026]
图2是根据本公开的处于第一状态或活动模式的致动器控制阀布置的示意图。
[0027]
图3是根据本公开的处于第二状态或抗伸展模式的致动器控制阀布置的示意图。
[0028]
图4是根据本公开的处于第三状态或下垂模式的致动器控制阀布置的示意图。
[0029]
图5是根据本公开的致动器控制阀布置的示意性剖视图。
具体实施方式
[0030]
参考图1,将首先描述致动器控制阀布置的已知的正冲程操作。
[0031]
图1示出了液压致动器1,所述液压致动器包括壳体2和活塞,所述活塞包括能够在壳体2中轴向移动的活塞杆3。通过响应于电控制信号经由致动器壳体2中的端口4、5从流体供应源10向致动器1提供加压的液压流体而引起活塞杆3相对于壳体2的移动。活塞杆具有自由端3a,所述自由端伸出壳体并且用于附接到将要通过致动器(未示出)移动的表面。壳体2内部的活塞杆的另一端具有活塞头部3b,所述活塞头部跨壳体2的直径伸展,从而将壳体内部分为两个腔室2a、2b,活塞头部3b的每一侧各有一个腔室。
[0032]
如果活塞杆3将要伸出壳体2,则来自来源hp的高压流体经由流体管线14、经由端口4提供到壳体2的腔室2b中,这使活塞杆沿箭头a的方向移动。因此,当活塞头部在壳体内移动时,腔室2a中存在的流体被迫在活塞头部的另一侧从壳体2经由端口5在流体管线15上作为低压(lp)流体去往贮存器(未示出)。如果将要使活塞杆3从伸展位置回缩,则高压流体经由端口5提供到腔室2a,从而使活塞杆3沿箭头b的方向移动,并且流体经由端口4被从腔室2b喷射到贮存器中。
[0033]
流体的方向受ehsv阀12控制,所述ehsv阀响应于电控制信号(未示出)而占据不同的阀位置。为了如上所述地使杆伸展,ehsv阀被定位在位置12x处,即,其中以12x所示的管线与从供应源到贮存器的流体管线对准。
[0034]
为了使活塞杆3回缩,通过使ehsv阀位于位置12y处而使流体管线反向。ehsv也可以具有中间位置,在所述中间位置中,在任何方向都没有流体流动。ehsv阀优选地经由ehsv弹簧122偏置到位置12y。因此,在失去电力的情况下,ehsv将恢复到位置12y以避免伸展。
[0035]
腔室2b中的机械止动件(未示出)使回缩的杆停留在“零”位置处。
[0036]
为了避免在液压压力损失的情况下致动器伸展,提供抗伸展阀13。由于在端口131和132处提供的流体压力一起超过了卸压阀弹簧133的力,所以抗伸展阀13通常位于位置
13x中,从而允许致动器与ehsv 12之间的流体连通。在发生液压故障的情况下,端口131处没有压力。由端口132处的拉伸负荷产生的压力不足以克服弹簧133的偏置,并且因此弹簧将抗伸展阀13推动到位置13y,这会将活塞杆保持在零位置处。
[0037]
在实践中,活塞杆3的端部3a附接到将要移动的部件或表面,例如扰流片(未示出)。
[0038]
所述系统还可在如上文简要讨论以下垂模式运行,其中响应于电控制信号,通过电磁阀,致动器活塞杆经历负冲程,即,活塞头部沿与伸展时相反的方向(方向b)远离零位置而移动。
[0039]
如上所述,如果将压力停止供应给致动器,则在下垂(负冲程)模式下,扰流片(或其他部件)将由于其自身的重量而施加向下的力。这可能妨碍其他部件(诸如襟翼)的移动,因为将启动抗伸展。
[0040]
本公开因此提供了一种用于扰流片的控制系统,当扰流片处于负冲程或下垂模式时,所述控制系统允许在下垂模式(负冲程)下可靠地操作,并且在液压和/或电力损失的情况下提供必要的安全特征。所述布置确保了即使对于扰流片的负冲程并且在电气/液压故障的情况下,扰流片也将被动地重定位。这将允许襟翼回缩,而不必克服来自扰流片的相反方向上的任何负荷。
[0041]
如同常规系统,致动器100包括壳体200,活塞杆300可根据活塞杆头部300b的两侧的压力平衡而在所述壳体200内移动。活塞杆300的自由端300a将附接到例如扰流片(未示出)的可移动表面。
[0042]
活塞杆300相对于壳体200的移动方向(以及因此,杆和扰流片是伸展还是回缩)通过来自供应源hp的高压液压流体的流动方向来确定。
[0043]
致动器壳体200具有两个端口400和500,活塞头部在壳体中的中间位置或零位置的两侧各有一个端口。如果扰流片将伸展并且因此杆将从壳体200伸展,则所述布置响应于电控制信号将控制高压流体hp注入到腔室200b中(如图2的左边所示),这将沿箭头a的方向压迫活塞杆300。低压流体将从腔室200a处的端口500喷射到lp贮存器。
[0044]
如果活塞杆300回缩,则响应于电控制信号,高压流体将经由端口500注入腔室200a中,并且这将迫使活塞头部返回腔室中。低压流体将经由端口400喷射回贮存器。
[0045]
流体流动的方向由ehsv 120控制,所述ehsv响应于控制信号而改变位置。为了使活塞杆伸展,ehsv占据位置120x,从而形成从hp到端口400并且从端口500到lp的流体管线。为了回缩,ehsv占据位置120y,使得形成从hp到端口500并且从端口400到lp的流体路径。
[0046]
抗伸展阀或止回阀130如上文参考图1所述地操作,由此惯常位置为130x,以完成通向端口500的流体路径,但是在端口130a和130b处的压力小于弹簧600的设定力(通常为fstall(预定的失速力)的1.2倍)的情况下,弹簧力将抗伸展阀驱动到位置130y,以防止活塞杆伸展。
[0047]
如图2所示,在活动模式下,活塞处于正冲程。在这种模式下,电磁阀140被设置到位置140y,使得来自来源hp的高压经由阀管线42流动通过所述阀,从而经由端口130b处的高压迫使止回阀130向右(在图中)移动以打开止回阀,从而在模式阀150与腔室200b之间提供流体路径。电磁阀140的位置还提供通向模式阀150的端口150a的高压流体路径,从而将模式阀150设置到位置150x以提供通向伺服阀120的流体路径。
[0048]
在这种配置中,当活塞将要伸展时,在活动(正冲程)模式下,控制器160会使伺服阀120移动到位置120x。来自来源hp的高压流体然后流动通过伺服阀120、通过模式阀150并进入致动器的腔室200a中,从而将活塞从壳体中推出至伸展位置。这迫使流体经由端口500流出腔室200b,并通过止回阀130(如果需要,经由维护装置45)、通过模式阀150和伺服阀返回低压输出lp。
[0049]
如上所述,模式阀150的主要任务是启动或钝化致动器。所述模式阀是用以在活动模式与抗伸展模式(或在杆回缩时的下垂模式)之间进行选择的主要装置。在所示实例中,模式阀包括阻尼装置,当致动器处于下垂模式时,所述阻尼装置将变得有用。借助于阻尼功能,如果致动器以下垂模式移动,则其阻力较小,这避免所谓的自由漂浮现象。这增加了机翼的稳定性。
[0050]
维护装置45,如果包括的话,允许当飞机在地面上时使回缩腔室减压的可能性。在没有所述装置的情况下,由于致动器中截留的压力,将不可能手动伸展致动器。在具有维护装置的情况下,飞机维护人员可以启动所述装置并伸展扰流片,以便能够进入机翼表面的下方。
[0051]
如果在正冲程活动模式下将活塞从伸展位置控制回到回缩位置或“零”位置,则伺服阀(120)被移动到位置(120y)以交换高压和低压流体流动路径,使得高压流体经由端口(500)提供到腔室(200a),并且经由端口(400)离开致动器。
[0052]
在抗伸展模式下,系统采用图3的配置。在此,扰流片被要求保持其中间位置。
[0053]
响应于中间位置命令,电磁阀140处于位置140x中。因此,没有高压流经由阀管线42从来源hp流向止回阀,并且因此止回阀弹簧130s的力使止回阀返回关闭位置。低压流体经由模式阀150在端口400处提供给腔室200b,所述模式阀通过其弹簧150s的力而返回到位置150y,并且这平衡了作用在活塞的开放侧上的力,因为流体无法经由关闭的止回阀从腔室200a中流出。
[0054]
如果活塞处于负冲程以提供下垂模式(图4),则机械触发器(下文进一步描述)将使止回阀向右移动(相对于附图)以占据开放位置,这归功于作用于所述阀的端口130a的机械连杆。这允许系统在给定的负冲程位置处发生液压或机械故障的情况下设置为所谓的旁路模式。
[0055]
参考图5可以更好地看到活塞位置与阀管线42之间的这种机械连杆。
[0056]
如图5所示,机械倒角800伸展到致动器壳体中位于中间位置后面的位置处(即,当相对于中间处于负冲程时,活塞头部所到达的位置处)。当活塞到达所述负冲程位置时,活塞紧靠倒角800,所述倒角进而抵抗止回阀的弹簧偏置而推动止回阀以占据开放位置130x。因此,如以下所述的其他模式中,止回阀的开放位置不依赖于来自控制器的电信号,也不依赖于液压路径。
[0057]
如上所述,可以经由控制电子器件160s将信号提供给电磁阀140,还可以将信号提供给ehsv 120,以设置这些阀的位置,以便控制用于移动活塞的液压流,但是在电气或液压故障的情况下,止回阀将保持打开。
[0058]
如果致动器处于负冲程,并且存在压力故障,则在没有本发明的情况下,杆可能会伸展并向下推动或者妨碍襟翼的移动。
[0059]
在具有本发明的系统的情况下,在正常情况下,在没有电气或液压故障的情况下,
扰流片的位置将通过阀和流动路径以已知的方式来控制。
[0060]
在电气故障(但无液压故障)的情况下,在正冲程操作中,如果气动力沿伸展方向拉动,则由于上述抗伸展功能,将不会有移动。如果气动力推动以使活塞返回,则活塞将返回中间位置。在负冲程的情况下,当发生电气故障时,襟翼的力和气动力将使活塞返回中间。在发生液压故障但没有电气故障的情况下,以及在电气和液压故障两者的情况下也是如此。
[0061]
利用本公开的布置,在液压故障的情况下,将可能手动移动扰流片折板以便进行维护等,因为将不会有强液压力作用在其上。
[0062]
本布置提供了一种简单的轻量型设计,以允许使用现有部件进行可靠的下垂功能,同时还允许在液压故障的情况下扰流片的简单(甚至手动)移动。
[0063]
尽管附图和随附说明描述了特定的实施方案和实例,但是应当理解,本公开的范围不限于此类特定实施方案,而是由所附权利要求确定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips