
 商标分类
商标分类  商标转让
商标转让 
飞机的推力和阻力的集成控制的制作方法
 2021-02-13 19:02:05|
2021-02-13 19:02:05| 240|
240| 起点商标网
起点商标网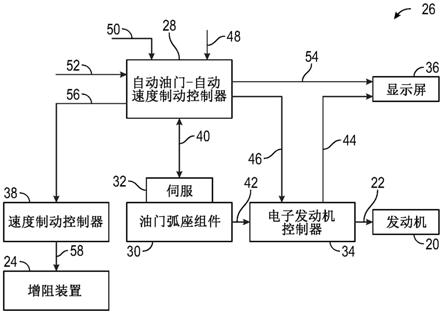
[0001]
技术领域一般地涉及飞机的推力和阻力的控制,更具体地涉及响应于例如对应于飞机速度、飞机高度、飞机速度目标和/或油门位置的各种数据信号而进行的飞机的推力装置和增阻装置的自动控制。
背景技术:
[0002]
飞机被设计成具有低阻力。然而,很多飞机采用可手动致动的增阻装置例如扰流板、速度制动器等来增加阻力。这些增阻装置可以安装在飞机的机身或机翼上,在被展开时会减小升力和/或增加阻力,以便例如在为了着陆而下降时,在不过度增加速度的情况下更快地降低高度,或者更快地降低速度。
[0003]
当飞行员或其他机组人员需要减小飞机升力或降低飞机速度时,通常他们会手动展开一个或多个增阻装置来增加飞机阻力。例如,可以通过拉动或以其他方式手动地致动速度制动手柄来展开增阻装置。
[0004]
遗憾的是,手动展开增阻装置会导致各种问题。例如,有可能因为飞行员或其他机组人员没有手动缩回被展开的增阻装置,使得增阻装置在展开位置停留太久而导致飞机过陡(over steeping)。再例如,飞机在为了着陆而下降时,通常以逐步清空(clearing)的方式降低高度。当飞机在每次清空进入平飞时,飞行员或其他机组人员或自动速度控制系统可以指示发动机产生更大的推力,以克服由展开的增阻装置产生的阻力。或者,在每次清空时,飞行员或其他机组人员可能不得不进一步执行多任务,手动缩回速度制动手柄,然后再次展开增阻装置,以下降到下一个清空。
[0005]
因此,期望提供一种用于控制飞机阻力的飞机、系统和方法,以更符合人机工程学的方式解决一个或多个前述问题。此外,通过随后的详细描述和所附权利要求并结合附图和该背景技术,本文描述的各种实施例的其他的有利的特征和特性会更加显而易见。
技术实现要素:
[0006]
本文提供飞机、用于控制飞机阻力的自动速度制动控制系统以及用于控制飞机阻力的方法的各种非限制性的实施例。
[0007]
在第一非限制性实施例中,所述飞机包括但不限于飞机结构。所述飞机进一步包括但不限于可操作地联接至所述飞机结构以在第一收起位置与第一展开位置和/或第一中间展开位置之间移动的第一增阻装置。所述飞机进一步包括但不限于速度制动控制器,其与所述第一增阻装置通信,用于控制所述第一增阻装置的移动。所述飞机进一步包括但不限于与所述速度制动控制器通信的自动油门-自动速度制动控制器。所述自动油门-自动速度制动控制器被配置为接收多个数据信号。所述数据信号包括飞机速度数据信号、飞机高度数据信号和速度目标数据信号。所述自动油门-自动速度制动控制器可操作以响应于所述数据信号中的至少一个,指示所述速度制动控制器控制所述第一增阻装置在所述第一收起位置与所述第一展开位置和/或所述第一中间展开位置之间的移动。
[0008]
在另一个非限制性实施例中,所述自动速度制动控制系统包括但不限于速度制动控制器,其被配置为与增阻装置通信,以控制增阻装置在收起位置与展开位置和/或中间展开位置之间的移动。所述自动速度制动控制系统进一步包括但不限于自动油门-自动速度制动控制器。所述自动油门-自动速度制动控制器被配置为接收多个数据信号。所述数据信号包括飞机速度数据信号、飞机高度数据信号和速度目标数据信号。所述自动油门-自动速度制动控制器可操作以响应于所述数据信号中的至少一个,指示所述速度制动控制器控制所述增阻装置在所述收起位置与所述展开位置和/或所述中间展开位置之间的移动。
[0009]
在另一个非限制性实施例中,所述方法包括但不限于由自动油门-自动速度制动控制器接收多个数据信号。所述数据信号包括飞机速度数据信号、飞机高度数据信号和速度目标数据信号。该方法进一步包括但不限于响应于所述数据信号中的至少一个,从所述自动油门-自动速度制动控制器向速度制动控制器传送命令信号。所述命令信号用于移动第一增阻装置。该方法进一步包括但不限于响应于所述命令信号,通过所述速度制动控制器控制所述第一增阻装置在第一收起位置与第一展开位置和/或第一中间展开位置之间的移动。
附图说明
[0010]
在下文中,将结合以下附图描述各个实施例,其中相同的附图标记表示相同的元件。其中:
[0011]
图1示出了根据示例性实施例的用于控制飞机阻力的系统的框图;
[0012]
图2示出了根据示例性实施例的飞机的立体图;
[0013]
图3示出了根据示例性实施例的包括处于收起位置的增阻装置的飞机的一部分的立体图;
[0014]
图4示出了根据示例性实施例的包括处于展开位置的增阻装置的飞机的一部分的立体图;
[0015]
图5示出了根据示例性实施例的用于控制飞机阻力的多元决策树;
[0016]
图6示出了根据示例性实施例的用于控制飞机阻力的方法。
具体实施方式
[0017]
下面的详细描述本质上仅是示例性的,并不旨在限制各种实施例或其应用和用途。此外,无意受到在前面的背景技术部分或下面的详细描述部分中提出的任何理论的约束。
[0018]
本文中考虑的各种实施例涉及飞机、用于控制飞机阻力的自动速度制动控制系统以及用于控制飞机阻力的方法。本文教导的示例性实施例提供一种具有飞机结构的飞机。在示例性实施例中,飞机结构包括机身,机身具有第一侧和与第一侧相对的第二侧。机身具有分别从机身的第一侧和第二侧横向向外延伸的第一机翼和第二机翼。
[0019]
一个或多个增阻装置可操作地联接至飞机结构,例如,联接至机身、第一机翼和/或第二机翼,以在收起位置与展开位置和/或两者之间的任何中间展开位置之间移动。速度制动控制器与增阻装置通信,以控制增阻装置的移动。自动油门-自动速度制动控制器与速度制动控制器通信。自动油门-自动速度制动控制器被配置为接收多个数据信号。在示例性
实施例中,数据信号包括飞机速度数据信号和速度目标数据信号。自动油门-自动速度制动控制器可操作以响应于数据信号中的至少一个,指示速度制动控制器控制增阻装置在收起位置和展开位置之间的移动。
[0020]
在示例性实施例中,有利地,仅在飞机处于自动驾驶且激活了自动速度控制的情况下,以及在某些俯仰和速度控制模式下,自动油门-自动速度制动控制器才使增阻装置的移动自动化。在另一个示例性实施例中,有利地,每次自动速度控制被激活时,自动油门-自动速度制动控制器都使增阻装置的移动自动化,但是可以仍然取决于飞行指引仪的俯仰和速度控制模式。
[0021]
在示例性实施例中,有利地,自动油门-自动速度制动控制器与速度制动控制器协作并且响应于数据信号中的至少一个,使增阻装置在收起位置和展开位置之间的移动自动化。这种增阻装置的移动的自动控制允许飞行员和/或其他机组人员通过减少他们的手动任务而更有效地集中精力控制飞机。此外,这种增阻装置的在收起位置和展开位置之间的移动的自动控制使得在适当时更有效地展开和缩回增阻装置,从而驾驶员和/或其他机组人员无须低效地制造额外的推力来克服由本应收回的展开的增阻装置产生的阻力,例如,在多级下降过程中,在清空时进行平飞期间。
[0022]
图2示出了根据示例性实施例的飞机的立体图。飞机10包括飞机结构,例如,作为飞机10的主体的机身12,其支撑从机身12的相对侧横向向外延伸的机翼14和16,以及机尾18。尽管所示的飞机10具有机身12和机翼14、16,应当理解,某些飞机可能没有机身(例如,b-2轰炸机等)和/或可能没有机翼(例如,升力体(lifting body)等)。因此,当本文的公开内容描述“某某附接到机身和/或机翼”时,应理解为它附接到飞机结构。取决于飞机10的设计,可能存在一个或多个发动机20(例如,所示的两个发动机20),其可以附接到机翼14和16,或者,也可以附接到机身12。在示例性实施例中,如将在后面更详细讨论的,飞机10包括一个或多个增阻装置24,其可操作地联接至机翼14和/或16(如图所示)中的其一或两者和/或机身12。
[0023]
再参照图1,在示例性实施例中,飞机10包括推力和阻力控制系统26,其被配置为用于执行发动机控制功能和自动速度制动功能。如图所示,推力和阻力控制系统26包括:自动油门-自动速度制动控制器28(其与油门弧座组件(tqa)30通信)、伺服器32(可选)、一个或多个电子发动机控制器34(每个相应地与多个发动机20之一通信)、和显示器36,它们相互协作以执行发动机控制功能。同样地,自动油门-自动速度制动控制器28与速度制动控制器38通信,该速度制动控制器38与一个或多个增阻装置24通信以执行自动速度制动功能。
[0024]
关于发动机控制功能,在示例性实施例中,自动油门-自动速度制动控制器28可操作以通过经由线路40向tqa 30发送油门控制命令来控制由发动机20产生的发动机推力。在示例性实施例中,tqa 30包括油门杆,并且伺服器32可操作以响应于来自自动油门-自动速度制动控制器28的油门控制命令移动油门杆以产生发动机推力命令。tqa 30经由线路42向电子发动机控制器34发送发动机推力命令。如将在后面更详细讨论的,tqa 30还经由线路40将油门位置数据信号发送回自动油门-自动速度制动控制器28,油门位置数据信号可以与其他数据信号一起被用来执行自动速度制动功能。作为替代方案,自动油门-自动速度制动控制器28可以通过经由线路46向电子发动机控制器34发送发动机推力命令,直接与发动机控制器34通信。
[0025]
响应于发动机推力命令,电子发动机控制器34经由线路22控制发动机20以产生推力。在示例性实施例中,电子发动机控制器34包括各种硬件(未示出)、软件(未示出)和接口(未示出),例如处理器、发动机传感器输入输出接口、发动机气门驱动器硬件。电子发动机控制器34接收并处理包括发动机推力命令的数据,并进一步生成发动机气门控制信号,发动机气门控制信号信号被提供给发动机气门驱动器硬件以控制飞机10的相应发动机20。
[0026]
如图所示,显示器36分别经由线路54和44与自动油门-自动速度制动控制器28和电子发动机控制器34相连。显示器36将来自自动油门-自动速度制动控制器28和电子发动机控制器34的各种发动机状态信息和其他相关信息提供给飞机10的驾驶舱区域的飞行员和/或其他机组人员。
[0027]
关于自动速度制动功能,如上简短描述的,自动油门-自动速度制动控制器28被配置为接收各种数据信号,以确定是否展开或收起增阻装置24。在一示例性实施例中,数据信号包括飞机速度数据信号、飞机高度数据信号、速度控制器模式信号、速度目标数据信号、高度目标数据信号和油门位置数据信号。具体地,飞机速度数据信号是对应于飞机10的速度的数据信号,飞机高度数据信号是对应于飞机10的高度的数据信号,速度控制器模式信号是对应于速度控制器的模式的数据信号,速度目标数据信号是对应于飞机10的目标速度或期望速度的数据信号,高度目标数据信号是对应于飞机10的目标高度或期望高度的数据信号,油门位置数据信号是对应于前面讨论的油门杆的位置的数据信号。
[0028]
在示例性实施例中,数据信号通过各种机载系统被发送到自动油门-自动速度制动控制器28。例如,数据信号可以包括经由线路48从飞机状态数据系统(未示出)发送的数据信号、经由线路50从飞行管理系统(未示出)发送的数据信号、经由线路52从飞行指示面板(未示出)发送的数据信号和/或经由线路54从tqa发送的数据信号。在示例性实施例中,经由线路48从飞机状态数据系统发送的数据信号包括速度数据信号和高度数据信号,经由线路50从飞行管理系统发送的数据信号包括速度控制器模式信号、速度目标数据信号和高度目标数据信号。在示例性实施例中,飞行指示面板包括:例如,飞行员和/或其他机组人员用来设置速度控制器模式信号、速度目标数据信号和高度目标数据信号的可调节旋钮和按钮,这些信号可经由线路52直接或间接地发送到自动油门-自动速度制动控制器28。
[0029]
如图所示,自动油门-自动速度制动控制器28经由线路56与速度制动控制器38通信。速度制动控制器38经由线路58与一个或多个增阻装置24通信,以控制增阻装置24的移动。在示例性实施例中,利用包括算法的软件,自动油门-自动速度制动控制器28响应于一个或多个数据信号,向速度制动控制器38发送制动命令信号,指示速度制动控制器38控制增阻装置24的移动。
[0030]
继续参照图3-4,通过在收起或存放位置60与展开或伸展位置62之间移动增阻装置24,来调节或控制飞机10的阻力。如本文所用,术语“展开位置”应理解为是部分展开、基本上完全展开或完全展开的位置。在示例性实施例中,如图所示,飞机10包括多个增阻装置24,它们被配置成扰流板70,扰流板70包括可操作地联接至机翼14和16的面板72。当扰流板70处于如图3所示的收起位置60时,面板72被定向成与翼14和16的上部76的外部翼面形状基本对准,从而使阻力最小。当扰流板70处于如图4所示的展开位置62时,面板72相对于机翼14和16的上部76的外部翼面形状向上倾斜延伸,以增加由飞机10产生的阻力。速度控制器对油门设置进行调节,以使飞机实际速度与目标速度匹配或基本上匹配。尽管飞机10被
示为具有安装在飞机10的机翼14和16的多个类似构造的增阻装置24,但是应当理解,飞机10也可以包括单个增阻装置或多个不同类型的增阻装置,它们可以安装到机身12和/或机翼14、16上。例如,增阻装置24可以是速度制动器(speed brake)、减速板(airbrake)、俯冲襟翼(dive flap)、起落架(例如,作为空气制动器的部分伸展的起落架)、着陆伞(air parachute)、它们的组合、和/或本领域技术人员公知的任何其他用于为飞机产生阻力的装置。
[0031]
在示例性实施例中,由自动油门-自动速度制动控制器28发送的速度制动命令信号包括用于指示展开增阻装置24的展开命令信号和用于指示收起增阻装置24的收起命令信号。当速度制动控制器38从自动油门-自动速度制动控制器28接收到展开命令信号时,速度制动控制器38将增阻装置38从收起位置60移动到命令所指示的展开位置62。当速度制动控制器38从自动油门-自动速度制动控制器28接收到收起命令信号时,速度制动控制器38将增阻装置24从展开位置62移动到收起位置60。
[0032]
在示例性实施例中,当油门位置数据信号对应于发动机怠速推力(例如,对应于发动机怠速的油门位置的低或最低设置),且飞机速度数据信号对应于比速度目标数据信号大的速度时,自动油门-自动速度制动控制器28将展开命令信号发送给速度制动控制器38,以展开增阻装置24。在另一个示例性实施例中,当自动油门-自动速度制动控制器28接收到对应于发动机怠速推力的油门位置数据信号以及对应于比高度目标数据信号高的高度的飞机高度数据信号时,自动油门-自动速度制动控制器28将展开命令信号发送给速度制动控制器38,以展开增阻装置24。
[0033]
在示例性实施例中,当飞机速度数据信号对应于与速度目标数据信号大致相同或较小的速度时,自动油门-自动速度制动控制器28将收起命令信号发送给速度制动控制器38,以收起增阻装置24。在另一个示例性实施例中,当飞机高度数据信号对应于与高度目标数据信号大致相同或较低的高度时,自动油门-自动速度制动控制器28将收起命令信号发送给速度制动控制器38,以收起增阻装置24。
[0034]
图5示出了根据示例性实施例的用于推力和阻力控制系统26的自动速度制动功能的各种决策路径的多元决策树100。在第一示例性实施例中,当油门位置数据信号不对应于发动机怠速推力时(框102处),经由线路84增阻装置被收起和/或处于收起位置(框103处)。根据一个示例性实施例,如果油门位置数据信号确实对应于怠速推力,则多元决策路径包括三个可能的变数(variance),用于经由线路86进行的自动速度制动功能的操作。这三个变数分别由线路88、90以及线路88、90的组合表示。
[0035]
在示例性实施例中,在由线路88表示的变数中,当飞机速度数据信号对应于比速度目标数据信号大的速度时(框104处),经由线路92、97增阻装置被展开和/或处于展开位置(框105处)。此外,当飞机速度数据信号对应于不大于速度目标数据信号的速度时(框104处),经由线路94、99增阻装置被收起和/或处于收起位置(框103处)。
[0036]
在另一示例性实施例中,在由线路90表示的变数中,当飞机高度数据信号对应于比高度目标数据信号高的高度时(框106处),经由线路96、97增阻装置被展开和/或处于展开位置(框105处)。此外,当飞机高度数据信号对应于不高于高度目标数据信号的高度(框106处),经由线路98、99增阻装置被收起和/或处于收起位置(框103处)。
[0037]
在另一示例性实施例中,在由线路88和90的组合所表示的变数中,当飞机速度数
据信号对应于比速度目标数据信号大的速度(框104处)且飞机高度数据信号对应于高度比高度目标数据信号高的高度(框106处)时,经由线路92、96和97增阻装置被展开和/或处于展开位置(框105处)。此外,当飞机速度数据信号对应于不大于速度目标数据信号的速度(框104处)且飞机高度数据信号对应于不高于高度目标数据信号的高度(框106处)时,经由线路94、98和99增阻装置被收起和/或处于收起位置(框103处)。
[0038]
图6示出了根据示例性实施例的用于控制飞机阻力的方法200。方法200包括由自动油门-自动速度制动控制器接收多个数据信号(步骤202)。数据信号包括飞机速度数据信号、飞机高度数据信号和速度目标数据信号。
[0039]
响应于数据信号中的至少一个,从自动油门-自动速度制动控制器向速度制动控制器传送命令信号(步骤204)。命令信号用于移动增阻装置。响应于命令信号,经由速度制动控制器控制增阻装置在收起位置和展开位置之间的移动(步骤206)。
[0040]
尽管在本公开的前面的详细描述中已经呈现了至少一个示例性实施例,但是应当理解,还存在大量的变型。还应当理解,一个或多个示例性实施方式仅是示例,并且无意以任何方式限制本公开的范围、适用性或配置。相反,前面的详细描述为本领域技术人员提供用于实施本公开的示例性实施例的便利路线图。应当理解,在不脱离如所附权利要求书中阐述的本公开的范围的情况下,可以对示例性实施例中描述的元件的功能和布置做出各种修改。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips