
 商标分类
商标分类  商标转让
商标转让 
一种无人机高精度全画幅倾斜摄影测量装置的制作方法
 2021-02-13 19:02:51|
2021-02-13 19:02:51| 264|
264| 起点商标网
起点商标网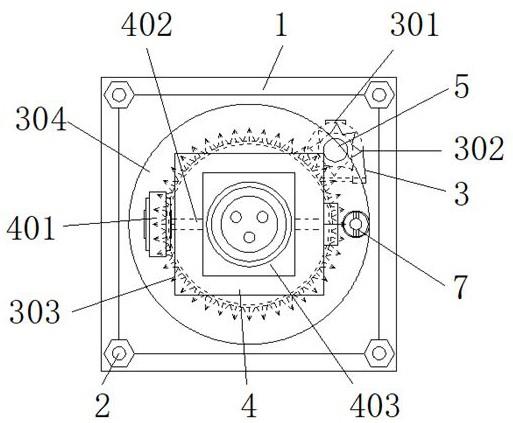
[0001]
本发明涉及无人机摄影技术领域,具体为一种无人机高精度全画幅倾斜摄影测量装置。
背景技术:
[0002]
倾斜航空摄影是相对于竖直航空摄影而言的,传统的航空摄影以获得正射影像为目的,采用像片倾角小于2-3
°
的摄影方式,称为竖直航空摄影。这一方式便于后续的正射纠正与立体测图等处理工作,但是会失去地物的侧立面细节。
[0003]
一般的航空摄影在拍摄时无法实现对地物顶部和侧立面的影像和纹理采集的问题,为此,我们提出一种实用性更高的无人机高精度全画幅倾斜摄影测量装置。
技术实现要素:
[0004]
本发明的目的在于提供一种无人机高精度全画幅倾斜摄影测量装置,以解决上述背景技术中提出的一般的航空摄影在拍摄时无法实现对地物顶部和侧立面的影像和纹理采集的问题。
[0005]
为实现上述目的,本发明提供如下技术方案:一种无人机高精度全画幅倾斜摄影测量装置,包括无人机连接装配底座、第二转动角度调节结构和第二角度转动传感器,所述无人机连接装配底座的四角均设置有装配固定螺栓,且无人机连接装配底座的上端面设置有第一转动角度调节结构,所述第二转动角度调节结构设置于第一转动角度调节结构的上方,且第二转动角度调节结构的右上方设置有第一角度转动传感器,所述第二角度转动传感器安装于第二转动角度调节结构的右侧,且第二角度转动传感器的右侧设置有激光雷达测距传感器。
[0006]
优选的,所述第一转动角度调节结构包括第一角度调节电机、第一齿轮、啮合齿轮、转动平台和连接轴承,且第一角度调节电机的输出端连接有第一齿轮,并且第一齿轮的外侧连接有啮合齿轮,所述啮合齿轮的内部连接有转动平台,且转动平台的底端连接有连接轴承。
[0007]
优选的,所述第一角度调节电机通过第一齿轮和啮合齿轮与转动平台之间构成转动结构,且第一齿轮与啮合齿轮之间相互啮合。
[0008]
优选的,所述转动平台通过连接轴承与无人机连接装配底座之间构成转动结构,且转动平台的转动角度为0-360
°
。
[0009]
优选的,所述第二转动角度调节结构包括第二角度调节电机、转动轴、连接台、转动圆球和摄影装配座,且第二角度调节电机的输出端连接有转动轴,并且转动轴的中间位置设置有连接台,所述连接台的内部安装有转动圆球,且转动圆球的上方连接有摄影装配座。
[0010]
优选的,所述第二角度调节电机通过转动轴与转动圆球之间构成转动结构,且转动圆球与连接台之间相互匹配。
[0011]
与现有技术相比,本发明的有益效果是:该种无人机高精度全画幅倾斜摄影测量装置通过设置的第一转动角度调节结构能够方便对影像的拍摄进行多角度调节,如此能方便摄影装置在水平面内进行360
°
无死角拍摄,设置的第一角度转动传感器能够方便对摄像装置的转动拍摄角度进行测量,从而能方便了解在水平面内的转动拍摄角度;设置的无人机连接装配底座能方便将测量装置与无人机之间相互连接,如此能方便将装置装配在无人机上保证连接的稳定性,同时也能对摄影测量结构起到稳定承载的效果;第二转动角度调节结构的设置能够对影像的竖直方向拍摄进行多角度调节,同时通过第二角度转动传感器的设置能方便对摄像装置在竖直平面内转动拍摄角度进行测量,从而能方便了解在竖直面内的转动拍摄角度,大大提高了该种无人机高精度全画幅倾斜摄影测量装置的实用性。
附图说明
[0012]
图1为本发明结构示意图;图2为本发明第二转动角度调节结构侧视结构示意图;图3为本发明第一转动角度调节结构侧视结构示意图;图4为本发明第一齿轮与啮合齿轮啮合连接结构示意图;图5为本发明工作流程示意图。
[0013]
图中:1、无人机连接装配底座;2、装配固定螺栓;3、第一转动角度调节结构;301、第一角度调节电机;302、第一齿轮;303、啮合齿轮;304、转动平台;305、连接轴承;4、第二转动角度调节结构;401、第二角度调节电机;402、转动轴;403、连接台;404、转动圆球;405、摄影装配座;5、第一角度转动传感器;6、第二角度转动传感器;7、激光雷达测距传感器。
具体实施方式
[0014]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0015]
请参阅图1-5,本发明提供一种技术方案:一种无人机高精度全画幅倾斜摄影测量装置,包括无人机连接装配底座1、第二转动角度调节结构4和第二角度转动传感器6,无人机连接装配底座1的四角均设置有装配固定螺栓2,且无人机连接装配底座1的上端面设置有第一转动角度调节结构3,第一转动角度调节结构3包括第一角度调节电机301、第一齿轮302、啮合齿轮303、转动平台304和连接轴承305,且第一角度调节电机301的输出端连接有第一齿轮302,并且第一齿轮302的外侧连接有啮合齿轮303,啮合齿轮303的内部连接有转动平台304,且转动平台304的底端连接有连接轴承305,第一角度调节电机301通过第一齿轮302和啮合齿轮303与转动平台304之间构成转动结构,且第一齿轮302与啮合齿轮303之间相互啮合,转动平台304通过连接轴承305与无人机连接装配底座1之间构成转动结构,且转动平台304的转动角度为0-360
°
;通过设置的第一转动角度调节结构3能够方便对影像的拍摄进行多角度调节,如此能方便摄影装置在水平面内进行360
°
无死角拍摄,设置的第一
角度转动传感器5能够方便对摄像装置的转动拍摄角度进行测量,从而能方便了解在水平面内的转动拍摄角度;设置的无人机连接装配底座1能方便将测量装置与无人机之间相互连接,如此能方便将装置装配在无人机上保证连接的稳定性,同时也能对摄影测量结构起到稳定承载的效果;第二转动角度调节结构4设置于第一转动角度调节结构3的上方,且第二转动角度调节结构4的右上方设置有第一角度转动传感器5,第二角度转动传感器6安装于第二转动角度调节结构4的右侧,且第二角度转动传感器6的右侧设置有激光雷达测距传感器7,第二转动角度调节结构4包括第二角度调节电机401、转动轴402、连接台403、转动圆球404和摄影装配座405,且第二角度调节电机401的输出端连接有转动轴402,并且转动轴402的中间位置设置有连接台403,连接台403的内部安装有转动圆球404,且转动圆球404的上方连接有摄影装配座405,第二角度调节电机401通过转动轴402与转动圆球404之间构成转动结构,且转动圆球404与连接台403之间相互匹配,第二转动角度调节结构4的设置能够对影像的竖直方向拍摄进行多角度调节,同时通过第二角度转动传感器6的设置能方便对摄像装置在竖直平面内转动拍摄角度进行测量,从而能方便了解在竖直面内的转动拍摄角度,大大提高了该种无人机高精度全画幅倾斜摄影测量装置的实用性。
[0016]
工作原理:对于这类的无人机高精度全画幅倾斜摄影测量装置,首先通过转动装配固定螺栓2能够将无人机连接装配底座1装配在无人机上,启动第一转动角度调节结构3,第一角度调节电机301工作能够通过第一齿轮302与啮合齿轮303的相互啮合,从而带动转动平台304转动,转动平台304通过连接轴承305能在无人机连接装配底座1上转动,如此能够调节在水平方向上的转动拍摄角度,启动第二转动角度调节结构4,第二角度调节电机401转动能够带动转动轴402转动,转动轴402能带动转动圆球404在连接台403上转动,摄影装配座405装配在转动圆球404上,如此通过转动圆球404能带动装配在摄影装配座405上的摄影转动,从而能够多角度调节摄影装置的摄影角度,型号为mcjs的第一角度转动传感器5连接在第一角度调节电机301上方,如此能够测量出水平方向上的转动角度,同理型号为mcjs的第二角度转动传感器6连接在第二角度调节电机401上,如此能够测量出竖直方向上的转动角度,同时通过型号为tf03的激光雷达测距传感器7能够测量处无人机的飞行高度,第一角度转动传感器5、第二角度转动传感器6和激光雷达测距传感器7能够将采集到的信息通过导线传递给无人机的主控制器,通过设置的第一角度转动传感器5、第二角度转动传感器6和激光雷达测距传感器7能够对摄影角度与摄影高度进行测量,如此能实现对地物顶部和侧立面的影像和纹理采集,使得倾斜航空摄影在大范围三维建模方面表现出了卓越的能力,就这样完成整个无人机高精度全画幅倾斜摄影测量装置的使用过程。
[0017]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips