
 商标分类
商标分类  商标转让
商标转让 
可倾转的三旋翼倾转旋翼飞行器的制作方法
 2021-02-13 18:02:54|
2021-02-13 18:02:54| 230|
230| 起点商标网
起点商标网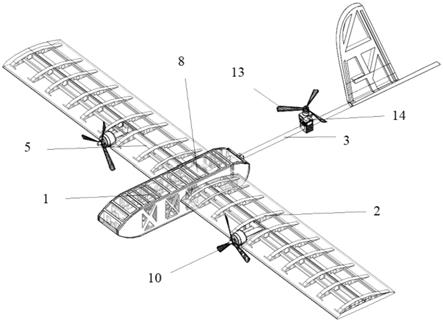
[0001]
本实用新型涉及飞行器技术领域,尤其涉及一种可倾转的三旋翼倾转旋翼飞行器。
背景技术:
[0002]
倾转旋翼机是一种将旋翼和固定翼飞机融为一体的飞行器,既具有普通多旋翼飞行器垂直起降和空中悬停的能力,又具有固定翼飞行器的高速巡航飞行的能力。常见的倾转旋翼飞行器主要有两类设计:同轴倾转与独立倾转机构。独立倾转机构为沿机翼纵向安装两根支撑杆,支撑杆将倾转舵机与电机座置于机翼中部前端,但是独立倾转机构存在倾转同步性不好等问题。同轴倾转机构的倾转旋翼机,通常在机翼的两翼尖处各装一套可在水平位置与垂直位置之间转动的旋翼倾转系统组件,但这种机构存在动力分散,低速时螺旋桨的对机翼舵面的气流加速弱,倾转过渡控制中机翼舵面力效差等缺点。
技术实现要素:
[0003]
本实用新型的目的在于克服上述技术的不足,而提供一种可倾转的三旋翼倾转旋翼飞行器。
[0004]
本实用新型为实现上述目的,采用以下技术方案:一种可倾转的三旋翼倾转旋翼飞行器,包括机身、机臂和尾杆,机臂固定在机身的两侧,尾杆固定在机身的后侧,其特征在于:还包括联动轴机构和尾桨倾转机构,所述联动轴机构包括联动电机、联动轴、左电机、右电机以及齿轮箱,所述联动轴贯穿机臂且与所经过的所有翼肋通过轴承相连接,联动轴的两端分别设有弯头,所述弯头上固定有连接件,所述连接件上分别固定有左电机和右电机,所述左电机和右电机上分别安装有旋翼,所述联动轴的中部穿过所述齿轮箱并与其内的一个伞齿轮连接,齿轮箱固定在机身的中心,齿轮箱内另一个伞齿轮与固定在齿轮箱外部的联动电机连接,两个伞齿轮啮合;所述尾桨倾转机构包括尾浆电机、舵机和电机座,所述舵机固定在所述尾杆上,所述电机座固定在舵机的舵盘上,尾浆电机安装在所述电机座上。
[0005]
优选地,所述弯头位于机臂内侧三分之一位置。
[0006]
优选地,所述弯头对应的机臂位置开槽,供弯头自由转动。
[0007]
本实用新型的有益效果是:使用齿轮啮合的方式使与齿轮相连的联动轴进行倾转带动两个电机倾转,尾桨电机通过舵机带动倾转,实现三旋翼倾转模式。对于联轴倾转机构使用齿轮的啮合传动方式,确保传动结构的稳定性及倾转时的同步性。联轴杆与翼肋相接,轴贯1/3翼展,同时可以作为机翼主要承力结构,加强了机翼与机身连接强度及机翼结构强度。联轴杆与翼肋连接处采用轴承方式,减小了倾转摩擦力。本设计是齿轮啮合与舵机控制相结合的三旋翼倾转飞行器,将倾转结构与机体一体化,提高稳定性,同时三旋翼相互配和亦使飞行器的灵活性有所提升。
附图说明
[0008]
图1为本实用新型的立体图;
[0009]
图2为本实用新型中联动轴与翼肋之间的连接图;
[0010]
图3为本实用新型中联动轴与齿轮箱的连接图;
[0011]
图4为本实用新型中弯头的位置图;
[0012]
图5为本实用新型中齿轮箱的示意图;
[0013]
图6为本实用新型中尾桨倾转机构的立体图;
[0014]
图7为本实用新型垂直模式的示意图;
[0015]
图8为本实用新型固定翼模式的示意图。
具体实施方式
[0016]
为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器或特征与其他器或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器被倒置,则描述为“在其他器或构造上方”或“在其他器或构造之上”的器之后将被定位为“在其他器或构造下方”或“在其他器或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
[0017]
如图1-6所示,一种可倾转的三旋翼倾转旋翼飞行器,包括机身1、机臂2 和尾杆3,机臂固定在机身的两侧,尾杆固定在机身的后侧,还包括联动轴机构和尾桨倾转机构,所述联动轴机构包括联动电机、联动轴5、左电机6、右电机7以及齿轮箱8,所述联动轴贯穿机臂且与所经过的所有翼肋通过轴承4相连接,机翼翼肋上穿过联动轴的孔内设计轴承,减小联动轴转动摩擦,同时使联动轴作为翼梁结构,增强机翼强度。
[0018]
联动轴的两端分别设有弯头9,所述弯头上固定有连接件,所述连接件上分别固定有左电机和右电机,所述左电机和右电机上分别安装有旋翼10。连接件采用铝合金制作,用螺丝固定;同时联动轴电机座处设有凹槽供电机放置;电机略突出机翼前缘,放置损坏机翼蒙皮影响机翼结构强度,妨碍机翼飞行时的空气动力流动。
[0019]
所述联动轴的中部穿过所述齿轮箱并与其内的一个伞齿轮11连接,齿轮箱固定在机身的中心,齿轮箱内另一个伞齿轮12与固定在齿轮箱外部的联动电机连接,两个伞齿轮啮合,啮合性能好同时结构紧凑能更好的完成联轴倾转机构的工作;齿轮啮合的动力源为电机,电机轴与齿轮孔使用过度配合,轴孔开相应键槽,以键传递力矩;同时联轴杆与齿轮以轴承相连,减小轴的磨损提高转动灵活性及保证联动轴的使用。
[0020]
所述尾桨倾转机构包括尾浆电机13、舵机14和电机座15,所述舵机固定在所述尾杆上,所述电机座固定在舵机的舵盘16上,尾浆电机安装在所述电机座上。尾桨初始垂直立轴安装于尾杆后部,通过舵机与电机座相连,实现倾转,从而保持飞行器偏航通道的稳定性与操控性。舵机接收控制信号,控制电机座转动,带动尾螺旋桨变换方向。
[0021]
使用时,step1:对飞行器进行飞行前检查,检查倾转机构是否有正常。
[0022]
step2:打开遥控器对飞行器的状态进行校准检测。
[0023]
step3:测试飞行器的情况和两倾转机构的工作情况。
[0024]
step4:旋翼模式起飞,齿轮电机控制联轴杆使得螺旋桨朝上。同时飞控系统计算三个电机力矩变化,依据姿态测算适时调整旋翼动力输出控制飞行姿态。
[0025]
step5:高度达到预设高度后,飞控控制齿轮电机使联轴杆转动,将机翼两个螺旋桨转动超前,飞行器改为固定翼模式。
[0026]
step6:飞行器降落时,再由固定翼改回旋翼模式。
[0027]
以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips