
 商标分类
商标分类  商标转让
商标转让 
电动倾转旋翼飞行器的制作方法
 2021-02-13 18:02:05|
2021-02-13 18:02:05| 190|
190| 起点商标网
起点商标网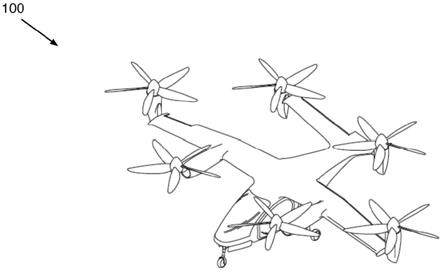
电动倾转旋翼飞行器
[0001]
相关申请的交叉引用
[0002]
本申请要求于2018年5月10日提交的美国临时申请第62/669,874号的权益,该临时申请通过该引用以其整体并入本文。
技术领域
[0003]
本发明总体上涉及航空领域,并且更具体地涉及在航空领域中的新的且有用的飞行器。
[0004]
背景
[0005]
旋转翼飞行器(如直升机)和固定翼飞行器之间存在权衡。虽然直升机能够垂直起降(vtol)和悬停,但固定翼飞行器在长途飞行中可以更有效地运行,并且通常可以以更高的速度行进。倾转旋翼飞行器(tiltrotor aircraft)(即,使用相同推进系统,能够在主要作为旋转翼飞行器运行和主要作为固定翼飞行器运行之间转换的飞行器)可以有利地将旋转翼运行的某些方面(例如,vtol和悬停能力)与固定翼运行的某些方面相结合;然而,倾转旋翼构型的传统方法存在若干缺点。例如,具有机械动力系统的倾转旋翼飞行器通常需要动力装置(例如,位于飞行器的机身内)和推进系统(例如,位于飞行器外部、远离动力装置的旋翼或螺旋桨)之间复杂的机械动力传输;这会增加飞行器的重量和复杂性。由于复杂性的增加,倾转旋翼飞行器的传统方法通常限制推进单元(例如,旋翼、螺旋桨、涡轮机等)的数量,这又增加了飞行期间在单引擎不工作(one-engine-inoperative,oei)或其他与推进相关的紧急情况下运载工具失控(loss of vehicle control,loc)的风险。传统的倾转旋翼飞行器也容易受到其他缺点的影响。
[0006]
因此,在航空领域中需要创造新的且有用的倾转旋翼飞行器。本发明提供了这样的新的且有用的倾转旋翼飞行器。
[0007]
附图简述
[0008]
图1a-图1b分别描绘了处于悬停构型和向前构型的飞行器的变型的俯视示意图;
[0009]
图1c-图1d分别描绘了处于悬停构型和向前构型的飞行器的变型的侧视示意图;
[0010]
图2a描绘了飞行器的一部分的变型和包括纵向轴线和横向轴线的示例性主要轴线的俯视图;
[0011]
图2b描绘了飞行器的一部分的变型和包括纵向轴线和垂直轴线的示例性主要轴线的侧视图;
[0012]
图3描绘了飞行器的多个螺旋桨的示例性的基本对称的悬停布置;
[0013]
图4描绘了处于向前布置的包括v形尾部的飞行器的变型的后视图;
[0014]
图5描绘了包括交叉的水平部和尾翼的飞行器的一部分的变型的后视图;
[0015]
图6a-图6b分别描绘了第一构型中和第二构型中的示例性推进组件相对于飞行器的飞行员的相对定位的示意图,在第一构型中飞行员位于推进组件前方,在第二构型中飞行员位于推进组件后方;
[0016]
图7描绘了在悬停模式运行期间飞行器相对于重力矢量的示例性定位;
[0017]
图8描绘了包括连杆机构的推进组件的示例性实施例的向前构型和悬停构型;
[0018]
图9描绘了在包括连杆机构的推进组件的示例处于向前构型和悬停构型两者中的飞行器的示例性实施例中的机翼和螺旋桨的相对定位;
[0019]
图10描绘了包括枢轴的推进组件的示例性实施例的向前构型和悬停构型;
[0020]
图11描绘了在包括枢轴的推进组件的示例处于向前构型和悬停构型两者中的飞行器的示例性实施例中的机翼和螺旋桨的相对定位;
[0021]
图12描绘了在包括掠倾翼(swept wing)的飞行器的示例性实施例和包括连杆机构的推进组件的示例性实施例中,机翼和螺旋桨在向前构型和悬停构型中的相对定位;
[0022]
图13描绘了在包括非掠倾翼的飞行器的示例性实施例和包括枢轴的推进组件的示例性实施例中,机翼和螺旋桨在向前构型和悬停构型中的相对定位;
[0023]
图14a-图14b分别描绘了处于向前布置的变型中的飞行器的示例性实施例的前部透视图和后部透视图;
[0024]
图15a-图15b分别描绘了处于悬停布置的变型中的飞行器的示例性实施例的第一透视图和第二透视图;
[0025]
图16a-图16b分别描绘了处于向前布置和悬停布置的变型中的飞行器的示例性实施例的正视图;
[0026]
图17a-图17b分别描绘了处于向前布置和悬停布置的变型中的飞行器的示例性实施例的俯视图;
[0027]
图17c描绘了一个表格,该表格显示了在图17a和图17b中的飞行器的示例性实施例的向前布置和悬停布置的变型中推进组件之间的变化的桨毂间距;
[0028]
图18a描绘了处于向前布置的变型中的飞行器的示例性实施例的侧视图;
[0029]
图18b描绘了飞行器在向前布置和悬停布置的变型之间的示例性实施例的侧视图;
[0030]
图18c描绘了飞行器处于悬停布置的变型中的示例性实施例的侧视图;
[0031]
图19a描绘了包括枢转倾斜机构的推进组件的变型,该枢转倾斜机构处于向前构型的变型;
[0032]
图19b描绘了包括枢转倾斜机构的推进组件的变型,该枢转倾斜机构处于向前构型和悬停构型的变型之间;
[0033]
图19c描绘了包括枢转倾斜机构的推进组件的变型,该枢转倾斜机构处于悬停构型的变型;
[0034]
图20a描绘了包括连杆倾斜机构的推进组件的变型,该连杆倾斜机构处于向前构型的变型;
[0035]
图20b描绘了包括连杆倾斜机构的推进组件的变型,该连杆倾斜机构处于向前构型和悬停构型的变型之间;以及
[0036]
图20c描绘了包括连杆倾斜机构的推进组件的变型,该连杆倾斜机构处于悬停构型的变型。
[0037]
优选实施例的描述
[0038]
以下对本发明的优选实施例的描述并不打算将本发明限制于这些优选实施例,而是为了使本领域中的任何技术人员能够制造和使用本发明。
[0039]
1.综述
[0040]
如图1a-图1b所示,倾转旋翼飞行器100包括机体框架和联接到机体框架的多个推进组件。飞行器100可在悬停模式和向前模式之间操作,在悬停模式中,多个推进组件120布置成悬停布置,在向前模式中,多个推进组件120布置成向前布置。悬停布置限定了在飞行器100以悬停模式运行期间多个推进组件120中的每个螺旋桨122相对于多个推进组件120中的每个其他螺旋桨122和机体框架110的位置,并且类似地,向前布置限定了在以向前模式运行期间每个螺旋桨122相对于每个其他螺旋桨122和机体框架110的相对位置。机体框架110可以包括左翼112、右翼114、机身116和尾翼118,其中左翼和右翼联接到机身116并位于尾翼118的前方之间。每个推进组件120包括螺旋桨、倾斜机构和电动机。每个推进组件120都可在悬停构型和向前构型之间操作,优选地通过与其相关联的倾斜机构124操作,但也可以可选地以任何其他合适的方式操作,如下面进一步详细描述的。倾转旋翼飞行器100可以另外包括电源、飞行控制表面142和致动器以及任何其他合适的部件。
[0041]
倾转旋翼飞行器100限定了重心(center of gravity,cog)。重心优选地是三维空间中的一个点,倾斜旋翼飞行器100的重量可以被认为从该点起作用,但是也可以被定义为具有有限体积的区域、在各种飞行器100装载构型中限定cog的一组点、和/或以其他方式被适当地定义。重心可取决于飞行器100的质量的状态或布置(例如,负载与空载、货物和/或乘客的重量分布、螺旋桨的倾斜构型等),并且本文对cog的引用优选地是指处于未负载状态(例如,空载状态)、且处于多个螺旋桨的悬停布置中的飞行器100的cog,但是可以附加地或替代地指飞行器100的负载状态、向前布置状态和任何其他合适的状态。
[0042]
倾转旋翼飞行器100限定了各种几何特征。如图2a-图2b所示,倾转旋翼飞行器100限定了主要几何轴线,包括:垂直轴线(例如偏航轴线10)、纵向轴线(例如滚转轴线20)和横向轴线(例如俯仰轴线30)。垂直轴线、纵向轴线和横向轴线可以被限定为使得它们在飞行器100的cog处相交,并且围绕上述轴线中的任何一个的纯力矩导致飞行器100分别围绕垂直轴线、纵向轴线和横向轴线旋转。然而,三个主要轴线可以附加地或替代地被几何地限定(例如,基于飞行器100在一个或更多个维度上的对称线,基于穿过飞行器100的任意线,等等),无论是否参考cog。例如,轴线可以在飞行器100的几何中心处相交。倾转旋翼飞行器100的螺旋桨各自限定了以螺旋桨的旋转轴线为中心的盘区域,并且该盘区域由远离旋转轴线延伸的无限盘平面所包含。在飞行器100的变型中,多个推进组件120中的每一个的盘平面可以与该多个推进组件120的其余部分的任何合适的子集共面延伸(coextensive);在第一示例中,在第一变型的悬停构型中,每个盘平面可以与每个其他盘平面共面延伸;在第二个示例中,每个盘平面可以与关于飞行器100的纵向轴线对称的另一个推进组件120的盘平面共面延伸,并且与每个其他推进组件120的盘平面偏离开;然而,该多个推进组件120的盘平面可以以其他方式相对于彼此适当地布置。
[0043]
倾转旋翼飞行器100用于提供可在悬停模式(例如,旋转翼模式)和向前模式(例如,固定翼模式)之间操作的航空运载工具。悬停模式可以包括飞行器100的垂直起飞、垂直着陆和/或基本静止的悬停;然而,悬停模式可附加地或替代地包括任何合适的操作模式,其中垂直方向的推力由多个推进组件120中的一个或更多个产生。向前模式可以包括飞行器100的向前飞行、水平起飞和/或水平着陆(例如,常规起飞和着陆/ctol);然而,向前模式可以附加地或替代地包括任何合适的操作模式,其中水平方向的推力由多个推进组件120
中的一个或更多个产生。因此,悬停模式和向前模式并不相互排斥,并且倾转旋翼飞行器100可以在悬停模式和向前模式的叠加模式下操作(例如,其中多个推进组件120被布置处于悬停布置和向前布置的叠加之中,该叠加由处于悬停构型和向前构型之间的多个推进组件120中的每一个的跨界构型(liminal configuration)所限定)。倾转旋翼飞行器100还可以用于提供这样的航空运载工具,该航空飞行器在悬停模式下是稳定的(例如,最大限度地稳定、在飞行条件的限定稳定窗口或包络内稳定、稳定达到飞行器100的各种控制输入的稳定阈值幅度等)且在向前模式下是高效的(例如,空气动力学高效、动力高效、热力学高效等)。倾转旋翼飞行器100还可以用于提供乘客和/或货物空中运输。此外,倾转旋翼飞行器100可以附加地或替代地具有任何其他合适的用途。
[0044]
倾转旋翼飞行器100可在多种模式之间操作,包括悬停模式和向前模式。在悬停模式下,多个推进组件120可以布置在悬停布置中。在悬停布置中,多个螺旋桨中的每一个优选地被布置处于悬停构型。在向前模式中,多个推进组件120可以布置成向前布置。在向前布置中,多个螺旋桨中的每一个优选地被布置处于向前构型。然而,在飞行器100运行的悬停模式中,多个螺旋桨中的每一个可以彼此独立地布置在向前构型和悬停构型之间的任何合适的状态中,和/或布置处于任何合适的定位;此外,在飞行器100运行的向前模式中,多个螺旋桨中的每一个可以彼此独立地布置在向前构型和悬停构型之间的任何合适的状态中,和/或布置处于任何其他合适的定位。此外,倾转旋翼飞行器100可以在悬停模式和向前模式之间的任何合适的跨界模式下操作,其中由一个或更多个推进组件120产生的推力分量指向成沿着垂直轴线和纵向轴线(例如,和/或横向轴线)。
[0045]
尽管飞行器100在本文被称为倾转旋翼飞行器100,但是本文使用的术语“螺旋桨”和“旋翼”可以指任何合适的旋转空气动力致动器,通常被称为旋翼、螺旋桨、旋转机翼、旋转翼型(rotary airfoil)等。虽然旋翼可以指利用铰接或半刚性桨毂的旋转空气动力致动器(例如,其中叶片与桨毂的连接可以是铰接的、柔性的、刚性的和/或以其他方式连接的),并且螺旋桨122可以指利用刚性桨毂的旋转空气动力致动器(例如,其中叶片与桨毂的连接可以是铰接的、柔性的、刚性的和/或以其他方式连接的),当在本文中使用时,这种区别不是明显的或隐含的,并且螺旋桨122的使用可以指铰接或刚性叶片的任一构型和任何其他可能的构型,和/或叶片连接到中心构件或桨毂的任何其他可能的构型。因此,倾转旋翼飞行器100可以被称为倾斜螺旋桨122飞行器100(tilt-propeller 122aircraft 100)、倾斜螺桨飞行器(tilt-prop aircraft)100和/或以其他方式被适当地提及或描述。在提到电动机的情况下,在一些变型中,电动机可以包括定子和转子,电动机126的转子可以指:在电动机的运行中,当电势能被转换成旋转动能时,电动机的发生旋转的部分。
[0046]
倾转旋翼飞行器100优选配置成使用相同的多个螺旋桨来优化悬停布置的悬停模式性能和优化向前布置的向前模式性能;然而,在替代构型中,倾转旋翼飞行器100可以包括仅在悬停模式运行期间使用的多个螺旋桨的子集和仅在向前模式运行期间使用的另一子集。在每个模式中螺旋桨的优化布置可以包括:在悬停布置和向前布置之间转换时,至少部分地沿着平行于飞行器100的纵向轴线和横向轴线中的至少一个的轴线,使每个螺旋桨的盘区域的中心(例如,沿着螺旋桨122轴线的点)的位置移位。例如,期望的悬停布置可以包括以六边形构型布置的六个螺旋桨盘,其中每个盘区域的中心与飞行器100的cog基本等距,因为至少一个其他盘区域关于飞行器100的滚转轴线或俯仰轴线上成镜像(例如,如图
1a和图3所示),而期望的向前布置可以包括旋转90
°
的六个螺旋桨盘(例如,使得每个螺旋桨122的旋转轴线基本上平行于纵向轴线),并且六个螺旋桨盘朝向机体框架110的一部分(螺旋桨122在推进组件附接点处附接到机体框架110的该部分(例如,如图1b所示))平移。然而,螺旋桨在每种模式(例如,向前布置、悬停布置等)下的布置可以附加地或替代地包括或省略多个螺旋桨中的任何一个的平移。
[0047]
在飞行器100的第一变型中,如图1a中的示例所示,悬停布置包括以成对的方式关于飞行器100的cog基本对称(例如,完全对称、近似对称等)布置的多个螺旋桨(例如,多个推进组件120的多个螺旋桨),并且多个螺旋桨的向前布置关于cog不对称。在相关的变型中,悬停布置包括成对布置的多个螺旋桨,使得每个螺旋桨122对应于沿着矢量与cog(例如,标称cog、在某个时间点测量的cog等)等距的第二螺旋桨122,该矢量在纵向方向和横向方向上都具有分量(例如,以在飞行器100的一个推进组件120不工作的状态下,最小化推进组件120的推力需求)。在另一种变型中,悬停布置包括关于飞行器100的cog的不对称布置的螺旋桨。多个螺旋桨的向前布置可以关于cog对称或不对称,并且优选相对于压力中心(例如,相对于各种飞行条件下的压力中心的范围)布置,以优化向前飞行中的稳定性和/或可控性。在附加的或替代的变型中,上述布置可以相对于飞行器100的几何中心而不是飞行器100的cog来实施。
[0048]
2.益处
[0049]
倾转旋翼飞行器100及其变型可以提供若干益处和/或优点。
[0050]
首先,倾转旋翼飞行器100的变型可以通过在oei情况下降低具有最大负载的运行电动机的功率需求来实现对单引擎不工作(oei)情况的有效和安全的操纵。有利的是,每个推进组件120使用相同的电动机126,并且由此布置推进组件120,使得任何单一故障都不需要剩余推进组件120中的一个以比其他剩余推进组件120更高的功率运行。例如,在飞行器100包括六个推进组件120且其中一个出现故障(例如,提供零推力、变得不可控等)的情况下,以140%的功率运行五台电动机比以200%的功率运行一台电动机并且以120%的功率运行其余四台电动机更好。在后一种假设的设计范例中,每台电动机都需要足够的能力以200%的额定功率运行,而前一种情况中每台电动机只要能以140%的额定功率运行即可;因此,在后一种情况下,电动机的总重量将大于前一种情况,即使剩余电动机产生的总功率可以更低。因此,为了在任何可能的oei情况(即,如果多个推进组件120中的任何单个电动机不工作)下降低对工作出力最多的剩余电动机的悬停功率的需求,这种变型的推进组件120的布局优选地使得在悬停布置中每个螺旋桨122的对(pair)关于cog对称(即,与cg基本等距并且间隔180
°
)。这种布局可以包括所有螺旋桨122的对与cog等距的布置,和/或每对中的每个螺旋桨122相对于该对中的与其对应的螺旋桨122关于cog等距布置,但是每个螺旋桨122的对可以与cog相距不同的距离(例如,如图17b所示)。
[0051]
例如,倾转旋翼飞行器100可以包括多个(例如,三个或更多个)基本相同的电动螺旋桨,这些螺旋桨围绕飞行器100的cog布置(例如,其中每个螺旋桨122与cog等距、接近等距、成对等距等)使得处于oei状态时对剩余电动机的过度出力的功率需求最小化(例如,与其中电动机不独立和/或不相同的构型相比)。这种能力还可以降低每个电动机的最大功率要求,这可以减小尺寸和/或重量,从而提高飞行器100的性能(例如,航程、速度、可用于电池质量的质量预算、边际质量减少(marginal mass reduction)等)。这种能力还可以增强
对于多个推进组件120中的每个推进组件120使用相同的电动机实例(例如,相同的电动机设计、基本相似的电动机等)的能力(例如,以降低系统整体复杂性)。推进组件120相对于飞行器100几何形状的布置优选地支持上述oei情况下的表现能力;例如,在飞行器100的悬停布置中,推进组件120的分布优选地使得在俯仰轴线30的每一侧和滚转轴线20的每一侧布置至少三个推进组件120(例如,其中失去任何一个推进组件120仍然具有在滚转轴线20和俯仰轴线30中的每一个轴线的任一侧上的至少两个可操作的推进组件120,在oei状态下利用推力差保持控制权限)。
[0052]
第二,倾斜旋翼飞行器100的变型能够实现在悬停模式下运行期间(例如,通过悬停布置中螺旋桨的对称或近似对称布置、横跨飞行器100的几何轴线的螺旋桨的成对对称布置等)和在向前模式下运行期间(例如,通过基于飞行器100的压力中心使推进组件120转换到向前飞行的期望布置)优化的飞行性能(例如,稳定性、可控性、响应性、在oei情况下的可操作性等)。
[0053]
第三,倾斜旋翼飞行器100的变型可以利用枢转倾斜机构(例如,枢轴)和连杆倾斜机构(例如,连杆机构)的组合来有效地在期望的悬停布置和期望的向前布置之间转换。枢轴和连杆机构两者的使用可以为飞行器100提供宽范围的可用机翼几何形状,同时还可以实现宽范围内的可能的悬停布置和向前布置。枢轴可以提供机械简单性(例如,减少零件数量、减少自由度数等)同时实现向前构型和悬停构型之间的转换,并且连杆机构能够在悬停构型和向前构型之间的转换期间实现盘区域平移的灵活性,以实现期望的几何形状;枢轴和连杆机构的组合能够实现最小的机械复杂性,同时在飞行器100的悬停和向前布置中获得期望的几何形状。
[0054]
然而,倾转旋翼飞行器100及其变型可以附加地或替代地提供任何其他合适的益处和/或优点。
[0055]
3.系统
[0056]
如图1a-图1b所示,倾转旋翼飞行器100 100包括机体框架110和联接到机体框架110的多个推进组件120。飞行器100可在悬停模式和向前模式之间操作,在悬停模式中,多个推进组件120布置成悬停布置,在向前模式中,多个推进组件120布置成向前布置。悬停布置限定了在飞行器100以悬停模式运行期间,多个推进组件120中的每个螺旋桨122相对于多个推进组件120中的每个其他螺旋桨122和机体框架110的位置,并且向前布置同样限定了在以向前模式运行期间,每个螺旋桨122与每个其他螺旋桨122和机体框架110的相对位置。机体框架110可以包括左翼112、右翼114、机身116和尾翼118,其中左翼和右翼联接到机身116并位于尾翼118的前方之间。每个推进组件120包括螺旋桨、倾斜机构和电动机。每个推进组件120都是可操作的,优选地通过与其相关联的倾斜机构124,但是可选地以任何其他合适的方式,在悬停构型和向前构型之间操作,如下面进一步详细描述的。倾转旋翼飞行器100可以另外包括电源、飞行控制表面142和致动器以及任何其他合适的部件和/或元件。
[0057]
3.1机体框架
[0058]
机体框架110用于在运行期间,在各种结构压力(例如,空气动力、重力、推进力、外部点力、分布力和体力(body forces)等)的影响下,结构性地支撑其自身和飞行器100的其他部分。机体框架110还可以用于限定一个或更多个内腔(例如,三维区域),该内腔适于容纳一个或更多个飞行员、一个或更多个乘客和/或任何合适数量和类型的货物。机体框架
110还可以用于限定一个或更多个推进组件附接点。机体框架110可以由适合于航空结构的各种材料构成,例如铝合金、钢合金、复合材料和任何其他合适的材料。机体框架110及其部件或部分(例如,机身116、机翼、尾翼118、操纵表面等)也可以用适合航空湿处理操作(aero-wetted operation)的各种材料(例如铝,具有任何合适涂层(例如油漆、低摩擦涂层等)的面板、碳纤维、复合材料、以及任何其他合适的材料)涂覆(例如,覆盖、镶板、包覆等)。
[0059]
机体框架110包括限定前端(nose end)和尾端(tail end)的机身116。前端可以指机身116的在机翼前方的部分,而尾端可以指机身116的位于机翼后方的部分。尾部可以包括连接到尾翼118并在结构上支撑尾翼118的尾梁(tail boom)。尾梁可以从机翼的后缘向后延伸到尾翼118,并且尾翼118优选地从尾梁向上延伸。特别地,尾翼118的垂直延伸高度优选地高于机体框架110的任何其他部分的最高垂直延伸高度,但是替代地,可以延伸达到机体框架110的不同部分的最高垂直延伸高度和/或低于该最高垂直延伸高度。在替代的变型中,尾翼118从尾梁向下延伸(例如,作为倒v形尾部)。在另一个替代的变型中,尾翼118从尾梁横向地和垂直地延伸(例如,作为传统的t形尾部、倒t形尾部等)。
[0060]
在变型中,如图4所示,尾翼118包括限定两个推进组件附接位置的v形尾部(例如,v字尾部),其中v形尾部的v形的每个最上部区域对应于推进组件附接位置。在该变型中,在飞行器100的向前布置中,两个螺旋桨中的每一个的盘区域在由滚转轴线和偏航轴线形成的平面中基本上位于机翼位置的上方(例如,从飞行器100的侧视图可见),使得尾部推进组件120(例如,联接到尾部的两个推进组件120的两个螺旋桨、后推进组件120等)基本上不受由上游的螺旋桨、静态飞行表面和/或动态飞行表面以及飞行控制表面引起的伴流干扰(wake disturbances)。尾翼118可替代地可以包括交叉的垂直的和水平的稳定器对(例如,t形尾部),如图5所示,并且在任何合适的位置包括一个或更多个推进组件附接点。
[0061]
在包括v字尾部的变型中,v字尾部可以前掠(例如,如图18a-图18c所示)。然而,v字尾部可以附加地或替代地后掠和/或基本垂直(例如,不掠倾)。
[0062]
左翼和右翼用于在倾转旋翼飞行器100向前飞行期间提供升力。机翼还用于向飞行器100的各种部件(例如,在一个或更多个推进组件附接位置处的一个或更多个推进组件120)提供结构性支撑。机翼还可以用于容纳倾转旋翼飞行器100的部件,例如配电系统(例如,电力电缆、电池等)、控制指令分配部件(例如,电传控制系统(fly-by-wire control systems)的电信号电缆、手动控制系统的机械连杆机构等)、以及任何其他合适的部件。
[0063]
在第一变型中,机翼刚性地固定到机身116。在第一具体示例中,机翼包括第一桁架,该第一桁架在一个或更多个机翼附接位置处联接到机身116的第二桁架。在第二具体示例中,机翼和机身116至少部分由连续材料(例如,复合材料、碳纤维材料等)构成,代替桁架或者作为桁架的附加。在第二变型中,机翼相对于机身116枢转。在第二变型的具体示例中,联接到机翼(例如,联接到左翼和右翼114中的每一个)的每个推进组件120的倾斜机构124是使机翼本身倾斜的机构(例如,相对于机身116旋转整个机翼的枢转机构)。然而,机翼和机身116可以以其他方式合适地联接。
[0064]
由机体框架110限定的推进组件附接位置用于将推进组件120机械地联接到机体框架110。在第一变型中,推进组件附接点是将推进组件120的一部分集成到机体框架110中(例如,集成到机翼中)的刚性附件;例如,在该变型中,推进组件120的倾斜机构124可以包括连杆机构,该连杆机构使螺旋桨盘远离推进组件120的固定到机翼上的部分延伸并使螺
旋桨盘延伸到推进组件120的固定到机翼上的部分上方。在第二变型中,推进组件附接点是枢轴的一部分(例如,纯枢轴机构的一侧);例如,在该变型中,推进组件120的倾斜机构124可以包括枢轴,该枢轴相对于机翼(例如,在机翼的尖端处)整体旋转推进组件120。
[0065]
在示例中,机体框架110可以包括远离机翼、机身116和/或尾翼118延伸的挂架,这些挂架限定了推进组件附接位置。挂架可以调节推进组件120的固定位置,因此,推进组件120在向前构型和悬停构型之间转换。例如,如图12和图17a所示,在机翼前掠的情况下,挂架可以从左翼和右翼的内侧位置向前延伸,以将内侧推进组件120延伸到外侧推进组件120的前方,并因此外侧推进组件附接位置在挂架基部(即,在没有挂架或类似延伸构件的情况下,内侧推进组件附接位置)的前方。挂架优选地在机翼的前方延伸,并且飞行器100优选地包括从左翼112向前延伸并联接到左内侧推进组件120的左内侧挂架,和从右翼114向前延伸并联接到右内侧推进组件120的右内侧挂架。在这样的示例中,在向前构型中,左内侧推进组件120和右内侧推进组件120的盘平面相对于左外侧推进组件120和右外侧推进组件120的盘平面沿着滚转轴线20向前移位。然而,在替代的变型和示例中,挂架可以相对于机体框架110在任何合适的方向上使推进组件120位置的固定位置移位。在进一步的替代方案中,飞行器100可以省略挂架,并且所有推进组件附接位置可以直接位于机体框架110的各个部分上。
[0066]
3.2推进组件
[0067]
倾转旋翼飞行器100包括多个推进组件120,推进组件120在相应的多个推进组件附接点处联接到机体框架110。每个推进组件120优选包括螺旋桨、倾斜机构和电动机。推进组件120用于容纳和搭配螺旋桨、倾斜机构、电动机以及与螺旋桨122及其机电驱动相关的任何其他合适的部件。倾转旋翼飞行器100优选包括偶数个推进组件120,并且更优选包括六个推进组件120;然而,倾转旋翼飞行器100可以附加地或替代地包括奇数个推进组件120、八个推进组件120和任何其他合适数量的推进组件120。
[0068]
推进组件120的螺旋桨122用于将由电动机126提供的旋转动能转换成空气动力(例如,用于在悬停模式、向前模式下等推动飞行器100)。螺旋桨122可以包括多个螺旋桨122叶片(例如,叶片、翼型等)、头部(例如,桨毂和相关联的连杆机构)以及任何其他合适的部件。螺旋桨122优选地是可变桨距(variable-pitch propeller)螺旋桨122(例如,其中每个螺旋桨122叶片的桨距是协调可变的,例如通过集中控制,其中每个螺旋桨122叶片的桨距是独立可变的,例如通过循环控制等),但是附加地或替代地可以是固定桨距螺旋桨。在一些变型中,飞行器100可以包括与多个推进组件120中的不同推进组件120相关联的可变桨距螺旋桨和固定桨距螺旋桨122。在附加的或替代的变型中,螺旋桨122可以铰接成负攻角状态,其可以用于产生反向推力而不改变螺旋桨的旋转方向。推进器122优选地每个推进器包括五个叶片,但是附加地或替代地,每个推进器122可以包括任何合适数量的叶片(例如,两个、三个、四个、六个等)。螺旋桨122可以限定任何合适的盘区域(例如,螺旋桨盘、盘等),并且每个叶片可以根据叶片跨度来限定任何合适的横截面和/或扭转角。
[0069]
在具体示例中,多个推进组件120的每个螺旋桨122包括一组螺旋桨122叶片,该组螺旋桨122叶片通过可变桨距连杆机构附接到桨毂,该可变桨距连杆机构绕螺旋桨122叶片的长轴旋转每个螺旋桨122叶片,并限制垂直于盘平面的螺旋桨122叶片运动(例如,螺旋桨122叶片基本上不从盘平面向前或向后铰转)。
[0070]
螺旋桨优选是非封闭的(例如,叶片尖部没有包连,没有入流屏蔽件等),但是在附加的或替代的变型中,可以是封闭的(例如,像涵道风扇那样用管道围住,围绕盘区域的周边封闭在整流罩内,等等)和/或在流入和/或流出路径中包括固定屏蔽件。
[0071]
推进组件120的倾斜机构124用于在悬停构型和向前构型之间转换每个螺旋桨122的定位。倾斜机构124还可以用于限制螺旋桨盘的可能运动,使得螺旋桨盘在悬停构型和向前构型中朝向机体框架110的径向投影(例如,盘平面)不与飞行器100的飞行员所在的任何部分相交,如图6a和图6b所示。在盘平面在向前构型中位于飞行员区域前方的构型中,在悬停构型和向前构型之间的转换期间的任何点,包括端点(例如,悬停构型和向前构型),盘平面优选地不与飞行员区域相交。例如,内侧推进组件120优选地定向成使得左内侧推进组件120和右内侧推进组件120的盘平面在向前构型和悬停构型之间的每个点处,在机身116中的飞行员区域外部,与机体框架110相交,在向前构型和悬停构型中,盘平面与机体框架110相交。然而,在替代示例中,推进组件120可以以其他方式相对于飞行员区域合适地布置。转换定位可以包括:围绕平行于飞行器100的俯仰轴线30的轴线使螺旋桨盘俯仰;平移推进组件120的一部分(例如,相对于推进组件附接点);围绕平行于飞行器100的偏航轴线10的轴线旋转螺旋桨盘;以及进行任何其他合适的平移或旋转和/或前述转换形态的组合。
[0072]
与每个推进组件120相关联的倾斜机构124优选地在悬停构型和向前构型之间调节每个螺旋桨122(例如,结合飞行器100在悬停模式和向前模式之间的转换);然而,在附加的或替代的变型中,可以通过与所有螺旋桨相关联的单个倾斜机构124(例如,与每个推进组件120刚性固定的倾斜机翼)、通过与多个螺旋桨的螺旋桨数量不同的多个倾斜机构(例如,其中一组六个螺旋桨被细分成对,并且每对由单个倾斜机构124在悬停构型和向前构型之间转换)执行调节,和/或以其他方式适当地执行调节。在第一变型中,飞行器100包括六个螺旋桨和六个倾斜机构,其中六个倾斜机构中的一个倾斜机构124与六个螺旋桨中的一个螺旋桨122相关联(例如,螺旋桨和倾斜机构具有一对一的对应关系)。在另一变型中,多个螺旋桨中的两个或更多个螺旋桨联接到单个倾斜机构124,使得单个倾斜机构124的致动将两个或更多个螺旋桨在悬停构型和向前构型之间转换(例如,其中两个或更多个螺旋桨刚性地联接到机翼,并且倾斜机构124绕俯仰轴线30旋转机翼以在悬停构型和向前构型之间操作飞行器100)。
[0073]
在变型中,倾斜机构124可以将推进组件120的整个电动机126和螺旋桨122,相对于推进组件120的其余部分,远离机体框架110(例如机翼、挂架等)移位。移位优选地由包括连杆机构的倾斜机构124执行(例如,如图8、图9和图20a-图20c所示);在这样的变型中,多个推进组件120中的至少一个的倾斜机构124包括连杆机构,该连杆机构在悬停构型中使电动机126和螺旋桨122平行于滚转轴线20移位(例如,从机翼或挂架向前或向后)。在这种变型的飞行器100的示例中,左内侧推进组件120和右内侧推进组件120各自的倾斜机构124均包括连杆机构,该连杆机构在悬停构型中分别将电动机126和螺旋桨122远离左翼112和右翼114移位。
[0074]
在附加的或替代的变型中,倾斜机构124可以旋转推进组件120本身,以在向前构型和悬停构型之间转换。在这种变型的飞行器100的示例中,左外侧推进组件120、右外侧推进组件120、左后推进组件120和右后推进组件120各自的倾斜机构124均包括枢轴,该枢轴在向前构型和悬停构型之间旋转每个推进组件120。
[0075]
然而,飞行器100可以附加地或替代地包括以任何合适的方式与任何合适数量的倾斜机构相关联的任何合适数量的螺旋桨。
[0076]
悬停构型在飞行器100以悬停模式(或向前模式和悬停模式的叠加)运行时,用于使推进组件120能够向飞行器100提供垂直推力。悬停构型可以在几何学上限定为推进组件120的这样的构型,其中螺旋桨122的螺旋桨盘平行于由纵向轴线和横向轴线限定的平面(例如,每个螺旋桨122的螺旋桨122轴线平行于飞行器100的垂直轴线);可替代地,在悬停构型中,螺旋桨盘可以偏离平行于该平面(例如,稍微偏离、大幅偏离等)。在一些变型中,当推进组件120处于悬停构型时,螺旋桨盘保持在垂直于重力矢量的定位上(例如,螺旋桨盘可以偏离平行于飞行器100的几何形状,以保持垂直于重力矢量,如图7所示)。
[0077]
在悬停构型中,螺旋桨盘从其向前构型中的位置的平移可以由倾斜机构来确定。例如,如图8所示,倾斜机构124可以包括连杆机构,该连杆机构使推进组件120的一部分(例如,螺旋桨、螺旋桨122和电动机等)远离推进组件附接点(例如,远离机翼前缘、远离机翼后缘、远离尾部区部的一部分的前缘特征等)悬臂伸出,以实现期望的悬停布置(例如,螺旋桨盘相对于多个螺旋桨的其他螺旋桨盘的位置)。在包括连杆机构的示例中,连杆机构可以包括向前延伸连杆机构,其中在螺旋桨122在向前构型和悬停构型之间转换时,连杆机构向前平移螺旋桨盘;该连杆机构还可以包括反向延伸连杆机构,其中该连杆机构在螺旋桨122在向前构型和悬停构型之间转换时向后平移螺旋桨盘。向前延伸连杆机构和/或反向延伸连杆机构可以分别沿向前方向或反向方向将螺旋桨122延伸任何合适的距离。在一些变型中,飞行器100可以包括将不同的螺旋桨延伸不同距离和/或将不同的螺旋桨在不同方向(例如,向前、反向)上延伸的连杆机构,以实现期望的悬停布置。如图10所示,倾斜机构124还可以包括枢轴,其中螺旋桨盘围绕推进组件附接点旋转,从而以受约束的方式相对于枢轴的旋转轴线平移。然而,当推进组件120处于悬停构型时,螺旋桨盘的定位可以以其他方式适当地限定。
[0078]
当飞行器100以向前模式(或以向前模式和悬停模式的叠加)运行时,向前构型用于使推进组件120能够向飞行器100提供水平推力。在向前构型中,倾斜机构124转换螺旋桨122的位置,使得每个螺旋桨122的旋转轴线平行于飞行器100的纵向轴线。此外,在向前构型中,螺旋桨122优选地布置成使得推进组件附接点和螺旋桨122的桨毂之间的悬伸距离最小化,如图8中的示例所示;然而,替代地,悬伸距离在向前构型中可以是任何合适的距离。
[0079]
倾斜机构124可以将推进组件120的定位保持在悬停构型和向前构型之间的任何合适的中间定位。例如,倾斜机构124可以保持推进组件120的定位,使得螺旋桨122轴线相对于纵向轴线倾斜45度。多个螺旋桨的多个倾斜机构可以独立地控制每个螺旋桨的定位;例如,布置在飞行器100的机翼上的一组四个推进组件120可以通过与每个推进组件120相关联的相应倾斜机构保持在向前构型,并且一对尾部安装的推进组件120可以相对于纵向轴线保持非零角度。
[0080]
在一些变型中,倾斜机构124将整个推进组件120联接到机体框架110,并且进行转换(例如,旋转、重新定位等),使推进组件120以其整体处于悬停构型和向前构型之间。在其他变型中,倾斜机构124使推进组件120的一部分(例如,螺旋桨122和电动机,仅是螺旋桨等)在悬停构型和向前构型之间转换。然而,附加地或替代地,倾斜机构124可以使推进组件120的任何合适的部分在构型悬停和向前构型之间转换。
[0081]
如图8和图20a-图20c所示,倾斜机构124可以包括连杆机构,该连杆机构能够在悬停构型和向前构型之间的转换期间,使螺旋桨盘能够同时平移和旋转(例如俯仰)。连杆机构用于在飞行器100以悬停模式运行期间实现螺旋桨122相对于多个螺旋桨中的其余螺旋桨的期望布置(例如,对称布置、近似对称布置、给定机体框架110约束的最大对称布置、关于升力的中心或cog成对对称布置、最小化下沉负载布置(download-minimizing arrangement)等),并且还用于在飞行器100以向前模式运行期间,实现螺旋桨122相对于机体框架110的期望布置(例如,最小悬伸布置、无伴流布置等)。通过从飞行器100的投影横截面偏移螺旋桨盘(例如,从上方或下方观察),该连杆机构还可以用于在悬停构型中减少因螺旋桨122的下洗对飞行器100的下沉负载。例如,如图9所示,连杆机构可以使螺旋桨盘偏离机翼平面,使得螺旋桨122的下洗对机翼表面的冲击最小化和/或减轻。然而,与多个推进组件120的各种螺旋桨相关联的一个或更多个倾斜机构可以附加地或替代地用于使螺旋桨盘偏离飞行器100的任何其他合适的部分(例如,机身116、尾部区部等)并由此减少飞行器100上的下沉负载(例如,如图1c、图12和图13中的示例所示)。
[0082]
在飞行器100的一些变型中,连杆机构可以通过几何地改变悬停布置中每个螺旋桨的位置来动态调节推力中心。在这样的变型中,连杆机构可以相对于机体框架110平行于包含滚转轴线20和俯仰轴线30的平面纯粹平移螺旋桨122(例如,代替在向前构型和悬停构型之间既平移又旋转螺旋桨122)。在示例中,连杆机构可以动态地调节推力中心以与cog重合(例如,在cog随着飞行器100的乘员和/或货物载荷改变位置而改变的情况下,在cog随着运载工具装载和/或卸载而改变位置的情况下,等等)。然而,这种变型可以利用连杆机构以任何其他合适的方式和任何其他合适的基础来另外适当地调节每个螺旋桨的相对位置。
[0083]
在飞行器100的具体示例中,左内侧推进组件120和右内侧推进组件120各自的倾斜机构124均包括连杆机构,该连杆机构在悬停构型中分别使电动机126和螺旋桨122远离左翼112和右翼114移位。
[0084]
如图10和图19a-图19c所示,倾斜机构124可以包括枢轴,该枢轴使得推进组件120能够围绕推进组件附接点纯粹旋转。枢轴用于在飞行器100以悬停模式运行期间,实现螺旋桨122相对于多个螺旋桨中的其余螺旋桨的期望布置(例如,期望的悬停布置),并且还用于在飞行器100以向前模式运行期间,实现螺旋桨122相对于机体框架110的期望布置(例如,期望的向前布置)。飞行器100优选地包括推进组件120,推进组件120通过包括枢轴的倾斜机构124在翼尖推进组件附接点处联接到机翼;然而,包括枢轴的倾斜机构124可以附加地或替代地用于在任何合适的推进组件附接点(例如,机翼中部点、尾部区段点、前部点等)处将推进组件120联接到机体框架110。如图11所示,螺旋桨盘定位在纵向轴线方向上可以与机翼的位置重叠(例如,从上方或下方观察);然而,枢轴可以在翼尖和/或机体框架110的任何其他合适的部分处使用,使得螺旋桨盘与机翼和/或飞行器100的任何其他合适的部分的投影区域的重叠最小化。
[0085]
在一些变型中,倾斜机构124可以包括枢轴和连杆机构的组合。例如,倾斜机构124可以包括反向延伸连杆机构,该反向延伸连杆机构的功能与向前延伸连杆机构基本相同,并且枢轴可以使推进组件120翻转(例如,180
°
),并且然后,向前延伸连杆机构可以在向后方向上延伸螺旋桨盘。
[0086]
考虑到飞行器100在悬停模式下运行期间的期望悬停布置,与每个推进组件120相
关联的倾斜机构124的类型可以基于多个螺旋桨中的每个螺旋桨122的期望悬停构型。例如,如图12所示,在包括前掠翼的飞行器100构型中,翼尖螺旋桨可以通过反向延伸连杆机构联接到机翼,并且内侧螺旋桨可以通过向前延伸连杆机构联接到机体框架110(例如,机体框架110的机舱或梁),以便实现螺旋桨122的期望悬停构型(例如,和相关联的悬停布置)。在另一个示例中,如图13所示,在包括较小(例如,零度)前掠角的飞行器100构型中,翼尖螺旋桨可以通过枢轴联接到机翼,并且内侧螺旋桨可以通过向前延伸连杆机构联接到机体框架110(例如,机体框架110的机舱或梁),以便实现螺旋桨122的期望悬停构型(例如,和相关联的悬停布置)。在一些变型中,具有多个螺旋桨的一个子集中的每个螺旋桨都利用第一倾斜机构124类型,并且具有多个螺旋桨的另一个子集中的每个螺旋桨都利用第二倾斜机构124类型。
[0087]
在具体的示例中(例如,如图14a-图14b和图15a-图15b所示),倾转旋翼飞行器100包括六个推进组件120。在该示例中,第一推进组件120通过枢轴联接到机翼上的左外侧位置(例如,在翼尖处),第二推进组件120通过枢轴联接到机翼上的右外侧位置,第三推进组件120在左侧联接到机翼的内侧区域并包括向前延伸连杆机构,第四推进组件120在右侧联接到机翼的内侧区域并包括向前延伸连杆机构,第五推进组件120联接到尾翼118的左侧并包括枢轴,并且第六推进组件120联接到尾翼118的右侧并包括枢轴。
[0088]
在另一个具体示例中,倾转旋翼飞行器100包括六个推进组件120。在该示例中,第一推进组件120通过枢轴联接到机翼上的左外侧位置(例如,在翼尖处),第二推进组件120通过枢轴联接到机翼上的右外侧位置,第三推进组件120在左侧联接到机翼的内侧区域并包括向前延伸连杆机构,第四推进组件120在右侧联接到机翼的内侧区域并包括向前延伸连杆机构,第五推进组件120联接到尾翼118的左侧并包括向前延伸连杆机构,并且第六推进组件120联接到尾翼118的右侧并包括前延伸连杆机构。
[0089]
推进组件120在悬停布置和向前布置中的布置可以由包含每个推进组件120的相应盘区域的平面来限定。例如,如图16b所示,在悬停布置中,左内侧推进组件120和右内侧推进组件120的盘区域可由第一平面包含,左外侧推进组件120和右外侧推进组件120的盘区域可由第二平面包含,第二平面从第一平面沿着偏航轴线10向上移位,并且左后推进组件120和右后推进组件120的盘区域可以被第三平面包含,第三平面从第二平面沿着偏航轴线10向上移位。如图17a所示,在转换到向前布置的该示例性构型中,左内侧推进组件120和右内侧推进组件120的盘区域可由第一平面包含,左外侧推进组件120和右外侧推进组件120的盘区域可由第二平面包含,第二平面从第一平面沿着滚转轴线20向后移位,并且左后推进组件120和右后推进组件120的盘区域可以被第三平面包含,第三平面从第二平面沿着滚转轴线20向后移位。在另外的或替代的示例中,盘平面可以在飞行器100的推进组件120的组中以其他方式相对于彼此适当地移位。
[0090]
推进组件120在悬停布置和向前布置中的布置可以由与每个推进组件120的螺旋桨的相应桨毂相交的线来限定。例如,如图16a所示,在向前布置中,左后推进组件和右后推进组件的桨毂可与第一条线相交,左内侧推进组件和右内侧推进组件的桨毂可与第二条线相交,第二条线从第一条线平行于偏航轴线向下移位,并且左外侧推进组件和右外侧推进组件可与第三条线相交,第三条线从第二条线平行于偏航轴线向下移位。在这个相同的示例中,如图17b所示,在悬停布置中,各个推进组件的桨毂可以与上述相同线相交。然而,这
些布置可以以其他方式适当地限定(例如,通过盘区域、通过桨毂相交等)。
[0091]
电动机126用于将电能转换成螺旋桨122的旋转动能,以向飞行器100提供推力。电动机126可以直接连接到螺旋桨122(例如,通过轴),但是替代地,可以通过动力传输连杆机构(例如,齿轮箱、偏置轴、离合器等)连接到螺旋桨122。在一些示例中,电动机126包括定子和转子,并且转子集成到联接到电动机126的螺旋桨122中(例如,螺旋桨122的一部分限定了与定子发生电磁相互作用以旋转螺旋桨的转子)。在替代的变型中,倾斜机构124可以至少部分地用作动力传输连杆机构,使得当螺旋桨盘在向前构型和悬停构型之间转换时,电动机126相对于螺旋桨盘的平面保持固定。
[0092]
电动机126可以是电磁电动机、静电电动机、压电电动机以及将电势能转换成旋转动能的任何其他合适类型的电动机。电动机126可以是自换向电动机(例如,有刷dc电动机、无刷dc电动机、开关磁阻电动机、通用ac-dc电动机或换向电励磁串联或并联绕线电动机等)或外部换向电动机(例如感应电动机、力矩电动机、同步电动机、双馈电动机、单馈电动机等)。在替代的变型中,电动机126可以包括无芯转子电动机、轴向转子电动机、步进电动机和任何其他合适类型的电动机。
[0093]
电动机126可以包括电联接到电动机的电动机控制器、电联接到电动机和电动机控制器的电源130、以及与电动机运行相关联的任何其他合适的部件(例如,热管理部件、润滑机构、反馈控制器等)。电动机控制器优选地保持在推进组件120的壳体内(例如,直接联接到电动机),但是可以附加地或替代地位于飞行器100上的其他地方,并且以任何其他合适的方式电联接到电动机。电源130优选地保持在壳体的远端(例如,在飞行器100上的另一个位置,联接到机体框架110),但是可以附加地或替代地保持在推进组件120的壳体内或飞行器100上的任何其他合适的位置。
[0094]
倾转旋翼飞行器100优选地包括与螺旋桨数量相等的多个电动机(例如,电动机和螺旋桨优选地具有一对一的对应关系),但是可以附加地或替代地包括与螺旋桨数量具有任何适当对应关系的任何适当数量的电动机。飞行器100的每个电动机126优选基本相同;然而,在替代的变型中,可以使用具有不同性能特性(例如,扭矩、效率、rpm范围等)的多个电动机。
[0095]
3.3电源和配电
[0096]
电源130的功能是为推进组件120和与飞行器100联接的飞行器100的任何其他电动部件(例如,机动连杆机构、飞行控制表面致动器和任何其他电动致动器、传感器、换能器、显示器等)提供动力。电源130优选地包括一个或更多个电池,但是可以附加地或替代地包括发电机(例如,燃烧驱动发电机、燃料电池、光伏发电机等)。在包括发电机的变型中,电源130可以包括用于给发电机供能的燃料(例如,包含在机载燃料箱中)。电源130优选位于飞行器100上远离推进组件120的位置,并且通过合适的电连接机构(例如,配电系统)电连接到需要电能的部件;然而,电源130可以附加地或替代地集成到电动机126组件中,并因此集成到推进组件120中,并因此可以根据运行期间倾斜机构124的变型而与其铰接。在又一替代的变型中,电源130可以相对于电动部件以其他方式适当地布置在飞行器100处(例如,以分布式方式、集中式方式等)并以任何其他合适的方式连接到其上。
[0097]
倾转旋翼飞行器100可以包括将电源130联接到每个电动部件(例如,包括每个电动机)的配电系统。配电系统可以包括电能传输总线,电能传输总线从多个电源(例如,电
池、电池网络、电池单元等)将电能分配到需要电能的飞行器100的部件。每个推进组件120优选地连接到至少一个相关联的电源130,电源130为推进组件120的电动机126组件提供能量,并且更优选地连接到多个相关联的电源,每个相关联的电源输送基本等量的电能。然而,电源可以附加地或替代地彼此互连和/或互连到一个或更多个推进组件120,使得任何推进组件120(或其他动力部件)可以从飞行器100的电源的任何合适的子集汲取电能,其中在电源之间具有任何合适的相对功率汲取率。
[0098]
3.4飞行操作部件
[0099]
倾转旋翼飞行器100可以包括各种飞行控制元件,以便于飞行控制和操作,这可以包括控制表面142和控制致动器。例如,倾转旋翼飞行器100可以包括起落架(例如,可收起起落架、固定起落架)、飞行控制表面(例如,襟翼、升降舵、副翼、方向舵、方向升降舵、扰流板、缝翼、空气制动器等)、飞行仪表(例如,高度计、空速指示器和测量装置、垂直速度指示器和测量装置、罗盘、姿态指示器和测量装置、航向指示器和测量装置、转向指示器和测量装置、飞行指引系统、导航系统和任何其他合适的仪表)以及任何其他合适的部件。各种部件可以以任何合适的方式联接到飞行器100;例如,飞行控制表面142可以联接到机翼和尾部的部分和/或由机翼和尾部的部分限定;飞行仪表可以布置在飞行器100的驾驶舱内和/或远程操作位置(例如,遥控操作设施、远程领航位置等);起落架可以布置在飞行器100的底部;等等。
[0100]
3.5另外的具体示例
[0101]
在具体示例中,飞行器100包括机体框架110,该机体框架110包括左翼112、右翼114、机身116和尾翼118。该示例中的机体框架110限定了偏航轴线10、俯仰轴线30和滚转轴线20。飞行器100包括联接到机体框架110的多个推进组件120(例如,在不同的推进组件附接位置)。每个推进组件120包括:电动机、联接到电动机的螺旋桨122、以及倾斜机构124,倾斜机构124将推进组件120连接到机体框架110并使推进组件120在向前构型和悬停构型之间转换。每个螺旋桨122限定盘区域、位于盘区域中心的桨毂、以及包含盘区域(例如,并远离桨毂延伸)的盘平面。每个推进组件120可在向前构型和悬停构型之间操作,其中在向前构型中盘平面垂直于滚转轴线20,并且其中在悬停构型中盘平面垂直于偏航轴线10。在该示例中,多个推进组件120包括联接至左翼112的左外侧推进组件120、在左外侧推进组件120和机身116之间联接至左翼112的左内侧推进组件120、联接至右翼114的右外侧推进组件120、在右外侧推进组件120和机身116之间联接至右翼114的右内侧推进组件120、联接到尾翼118左侧的左后推进组件120、以及联接到尾翼118右侧的右后推进组件120。在该示例中,螺旋桨相对于彼此的位置在飞行器100的向前布置和悬停布置之间不同(例如,左内侧推进组件120的桨毂与左外侧推进组件120的桨毂在向前布置中分开第一距离,而在悬停布置中分开第二距离,并且对于每个其他推进组件是类似的,如图17a-图17c中的示例所示)。
[0102]
在相关的具体示例中,左内侧推进组件120和右内侧推进组件120各自的倾斜机构124均包括连杆机构,该连杆机构在悬停构型中分别使电动机126和螺旋桨122远离左翼112和右翼114移位。
[0103]
在相关的具体示例中,左外侧推进组件120和右外侧推进组件120各自的倾斜机构124均包括枢轴,该枢轴在向前构型和悬停构型之间分别旋转左外侧推进组件120和右外侧推进组件120。在相关的具体示例中,左后推进组件120和右后推进组件120的倾斜机构124
各自包括枢轴,该枢轴在向前构型和悬停构型之间分别旋转左后推进组件120和右后推进组件120。
[0104]
在相关的具体示例中,如图18a-图18c所示,尾翼118包括前掠v字尾部,并且左后推进组件120联接到前掠v字尾部的左侧的最前部区域,并且右后推进组件120联接到前掠v字尾部的右侧的最前部区域。
[0105]
在另一具体示例中,飞行器100包括机体框架110,该机体框架110包括左翼112、右翼114、机身116和尾翼118。机体框架110限定了偏航轴线10、俯仰轴线30和滚转轴线20。飞行器100还包括联接到机体框架110的多个推进组件120,并且每个推进组件120包括电动机、联接到电动机的螺旋桨122、以及倾斜机构124,倾斜机构124将推进组件120连接到机体框架110并且将推进组件120在向前构型和悬停构型之间转换。每个螺旋桨122限定了盘区域、位于盘区域中心的桨毂、以及包含盘区域的盘平面,并且盘平面在向前构型中垂直于滚转轴线20,并且盘平面在悬停构型中垂直于偏航轴线10。总体而言,多个推进组件120可在向前布置和悬停布置之间转换(例如,其中多个推进组件120中的每一个在向前布置中处于向前构型,并且多个推进组件120中的每一个在悬停布置中处于悬停构型),其中多个推进组件120中的桨毂中的至少两个桨毂之间的间距在向前布置和悬停布置之间是变化的。
[0106]
尽管为了简明起见而省略了,但是优选实施例包括各种系统部件的每一种组合和排列,这些系统部件可以以任何合适的排列或组合进行组合和/或从优选实施例的变型中全部或部分地省略。
[0107]
如本领域中的技术人员从前面的详细描述和从附图和权利要求中将认识到的,可对本发明的优选实施例进行修改和变化而不偏离在所附的权利要求中限定的本发明的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips