
 商标分类
商标分类  商标转让
商标转让 
一种水利用无人机扩展起落装置的制作方法
 2021-02-13 18:02:52|
2021-02-13 18:02:52| 197|
197| 起点商标网
起点商标网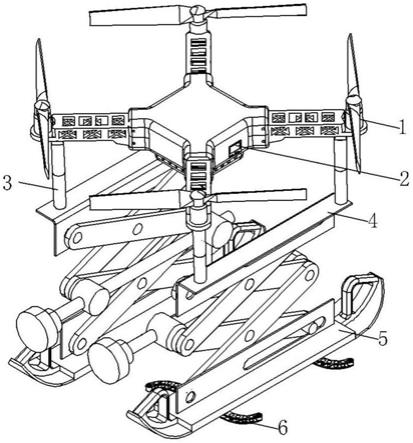
[0001]
本发明涉及水利技术领域,具体为一种水利用无人机扩展起落装置。
背景技术:
[0002]
近年来,水资源污染越来越严重,目前我国水质监测主要依靠人工监测和无人船监测,人工监测需要实地采样,周期很长且需要消耗大量人力物力;目前最新出现的水质监测船也有一定缺陷,如在水面收到严重污染或有大量漂浮物是无人船会受到阻碍和污染,但基于无人机技术的水质监测采样,较好的弥补了上述缺陷,且有助于水质监理的高效化和精确化,提高了水质监测的信息化水平,并最终达到水质监理监测自动化、信息化和现代化的目的,利用无人机技术,对水域实施动态监测,能够查明范围内水域的变化情况,通过掌握的水域基础数据来建立水域调查、水域统计及其他管理制度,逐步实现水域管理的信息化,满足社会经济发展和水域管理的需要。利用水域动态监测结果,建立水域变化及非法水域占用资料,为水利管理提供依据;
[0003]
现有技术领域内,水利用无人机起落架多为固定式,只能运载体积高度有限的装置和货物,适用性较差,并且由于水利无人机用于多为湖泊沼泽环境下,当无人机被迫降落容易沉入湖泊沼泽内,造成无法抢救的损失。
技术实现要素:
[0004]
本发明的目的在于提供一种水利用无人机扩展起落装置,以至少解决现有技术的水利用无人机起落架多为固定式,只能运载体积高度有限的装置和货物,适用性较差,并且由于水利无人机用于多为湖泊沼泽环境下,当无人机被迫降落容易沉入湖泊沼泽内,造成无法抢救的损失的问题。
[0005]
为实现上述目的,本发明提供如下技术方案:一种水利用无人机扩展起落装置,包括:
[0006]
多旋翼无人机;
[0007]
控制器,设置在所述多旋翼无人机的外壁;
[0008]
减震机构,所述减震机构的数量为四个,四个所述减震机构分别设置在多旋翼无人机的底端四角;
[0009]
高度调节机构,所述高度调节机构的数量为两个,两个所述高度调节机构分别沿前后方向设置在左右两侧的前后两个减震机构的底端;
[0010]
起落架,所述起落架的数量为两个,两个所述起落架分别沿前后方向设置在左右两个高度调节机构的底端;
[0011]
浮力机构,所述浮力机构的数量为两组,每组所述浮力机构的数量为两个,两组所述浮力机构分别内嵌在左右两个起落架的底端前后两侧。
[0012]
优选的,所述减震机构包括;插槽块、插块、减震阻尼器和减震弹簧;插槽块设置在所述多旋翼无人机的底端;插块沿上下方向插接在所述插槽块的内腔低端,所述插块的低
端延伸出插槽块的下表面;所述减震阻尼器的一端设置在所述插槽块的内腔顶端,所述减震阻尼器的另一端与插块的顶端固定连接;减震弹簧套接在所述减震阻尼器的外壁,所述减震弹簧的上下两侧分别与插槽块的内壁和插块的顶端固定连接。
[0013]
优选的,所述高度调节机构包括;顶板、第一限位槽、第一限位滑块和第一支撑杆;顶板沿前后方向设置在前后两个减震机构内的插块的底端;第一限位槽沿前后方向开始在所述顶板的外侧后端;第一限位滑块插接在所述第一限位槽的内腔;所述第一支撑杆的数量为两个,两个所述第一支撑杆之间交叉设置且交叉处通过销轴转动连接,前后两个所述第一支撑杆的顶端分别与第一限位滑块的外侧和顶板的外侧前端通过销轴转动连接。
[0014]
优选的,所述高度调节机构还包括;底板、第二限位槽、第二限位滑块和第二支撑杆;底板沿前后方向设置在所述顶板的下方对应位置处;第二限位槽沿前后方向开始在所述底板的外侧后端;第二限位滑块插接在所述第二限位槽的内腔;所述第二支撑杆的数量为两个,两个所述第二支撑杆之间交叉设置且交叉处通过销轴转动连接,前后两个所述第二支撑杆的顶端分别与前后两个第一支撑杆的低端外侧通过销轴转动连接,前后两个所述第二支撑杆的低端与第二限位滑块的外侧和底板的外侧前端通过销轴转动连接。
[0015]
优选的,所述高度调节机构还包括;限位插块、螺杆和螺母;限位插块通过销轴转动连接在后侧第一支撑杆的底端和后侧第二支撑杆的顶端通过销轴转动连接;螺杆沿前后方向插接在所述限位插块的内腔前侧,所述螺杆的后端贯穿限位插块的内腔;螺母通过销轴转动连接在前侧第一支撑杆的底端和前侧第二支撑杆的顶端通过销轴转动连接,所述螺母的内腔与螺杆的外壁后侧相螺接。
[0016]
与现有技术相比,本发明的有益效果是:该水利用无人机扩展起落装置:
[0017]
1、通过转动左右两个高度调节机构内的螺杆,促使螺母在螺杆旋转力的作用下向带动前侧第一支撑杆底端和第二支撑杆的顶端向前侧移动,前侧第一支撑杆以与顶板销轴转动连接处为顶点低端向前侧转动,前侧第二支撑杆以与底板销轴转动连接处为顶点顶端向前侧上方转动,限位插块带动后侧第二支撑杆顶端和后侧第一支撑杆的底端均向后侧移动,进而使后侧第一支撑杆以与第二支撑杆销轴转动连接处为顶点自身顶端向前侧移动,后侧第二支撑杆以与限位插块销轴转动连接处为顶点自身底端向前侧移动,促使前后两个第一支撑杆和第二支撑杆之间的夹角均变小,进而在底板的配合下推动起落架向下移动至指定位置,进而改变多旋翼无人机驻停时自身内侧高度,以便于挂载不同高度大小的运载件;
[0018]
2、通过起落架在多旋翼无人机降落过程中受到地面冲击力并由对应位置上的高度调节机构传导致左右两侧的前后两个减震机构内的插块上,插块向上移动同时挤压减震弹簧以对冲击力进行吸收,进而起到对多旋翼无人机降落时的缓冲作用,减震弹簧自身弹性作用下受挤压释放后的弹力被减震阻尼器吸收以减弱,防止多旋翼无人机颠簸损坏;
[0019]
3、通过当多旋翼无人机受到故障及外部不可控力的影响下被迫降落至沼泽湖面等地点时,电磁板停止与当前位置上的永磁板磁性相吸进而解除对主动齿轮的固定,涡卷弹簧在自身弹性作用下驱动主动齿轮转动,促使从动齿轮在主动齿轮旋转力的作用下驱动对应位置上的转轴带动转动杆向外侧转动进而伸出至底座外侧,遇水自膨胀气囊表面遇水后膨胀,进而增大多旋翼无人机低端与沼泽或湖面的接触面积和浮力,以防止多旋翼无人机沉入内部;
[0020]
从而可实现水利用无人机起落架的高度调整,进而可运载体积高度不同大小的装置和货物,提高装置适用性,并且当无人机被迫降落在湖泊或沼泽内,可改变无人机浮力大小,避免无人机沉入内部造成损失。
附图说明
[0021]
图1为本发明的结构示意图;
[0022]
图2为图1的减震机构爆炸图;
[0023]
图3为图1的高度调节机构爆炸图;
[0024]
图4为图1的浮力机构爆炸图。
[0025]
图中:1、多旋翼无人机,2、控制器,3、减震机构,31、插槽块,32、插块,33、减震阻尼器,34、减震弹簧,4、高度调节机构,41、顶板,42、第一限位槽,43、第一限位滑块,44、第一支撑杆,45、底板,46、第二限位槽,47、第二限位滑块,48、第二支撑杆,49、限位插块,410、螺杆,411、螺母,5、起落架,6、浮力机构,61、安装板,62、连接杆,63、转轴,64、从动齿轮,65、转动杆,66、涡卷弹簧,67、主动齿轮,68、永磁板,69、电磁板,610、遇水自膨胀气囊,611、底座。
具体实施方式
[0026]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0027]
请参阅图1-4,本发明提供一种技术方案:一种水利用无人机扩展起落装置,包括:多旋翼无人机1、控制器2、减震机构3、高度调节机构4、起落架5和浮力机构6,多旋翼无人机1具体使用型号根据实际使用要求直接从市场上购买安装并使用的;控制器2设置在多旋翼无人机1的外壁,控制器2具体使用型号根据实际使用要求直接从市场上购买安装并使用的,控制器2内部设置有无线网络模块进而由工作人员远程进行控制;减震机构3的数量为四个,四个减震机构3分别设置在多旋翼无人机1的底端四角;高度调节机构4的数量为两个,两个高度调节机构4分别沿前后方向设置在左右两侧的前后两个减震机构3的底端;起落架5的数量为两个,两个起落架5分别沿前后方向设置在左右两个高度调节机构4的底端;浮力机构6的数量为两组,每组浮力机构6的数量为两个,两组浮力机构6分别内嵌在左右两个起落架5的底端前后两侧。
[0028]
作为优选方案,更进一步的,减震机构3包括;插槽块31、插块32、减震阻尼器33和减震弹簧34;插槽块31设置在多旋翼无人机1的底端;插块32沿上下方向插接在插槽块31的内腔低端,插块32的低端延伸出插槽块31的下表面,插块32可在插槽块31内腔上下移动;减震阻尼器33的一端设置在插槽块31的内腔顶端,减震阻尼器33的另一端与插块32的顶端固定连接,减震弹簧34自身弹性作用下受挤压释放后的弹力被减震阻尼器33吸收以减弱,可防止多旋翼无人机1颠簸损坏;减震弹簧34套接在减震阻尼器33的外壁,减震弹簧34的上下两侧分别与插槽块31的内壁和插块32的顶端固定连接,减震弹簧34为压缩弹簧,减震弹簧34受到拉伸或挤压后产生弹性形变,去除外力后恢复至初始状态。
[0029]
作为优选方案,更进一步的,高度调节机构4包括;顶板41、第一限位槽42、第一限
位滑块43和第一支撑杆44;顶板41沿前后方向设置在前后两个减震机构3内的插块32的底端;第一限位槽42沿前后方向开始在顶板41的外侧后端;第一限位滑块43插接在第一限位槽42的内腔,第一限位滑块43可在第一限位槽42的内腔前后滑动;第一支撑杆44的数量为两个,两个第一支撑杆44之间交叉设置且交叉处通过销轴转动连接,前后两个第一支撑杆44的顶端分别与第一限位滑块43的外侧和顶板41的外侧前端通过销轴转动连接,前侧第一支撑杆44可以与顶板41销轴转动连接处为顶点低端向前侧或向后侧转动,后侧第一支撑杆44以与限位插块49销轴转动连接处为顶点自身顶端在第一限位滑块43的限位作用下向前侧或向后侧移动。
[0030]
作为优选方案,更进一步的,高度调节机构4还包括;底板45、第二限位槽46、第二限位滑块47和第二支撑杆48;底板45沿前后方向设置在顶板41的下方对应位置处;第二限位槽46沿前后方向开始在底板45的外侧后端;第二限位滑块47插接在第二限位槽46的内腔,第二限位滑块47可在第二限位槽46的内腔前后滑动;第二支撑杆48的数量为两个,两个第二支撑杆48之间交叉设置且交叉处通过销轴转动连接,前后两个第二支撑杆48的顶端分别与前后两个第一支撑杆44的低端外侧通过销轴转动连接,前后两个第二支撑杆48的低端与第二限位滑块47的外侧和底板45的外侧前端通过销轴转动连接,前侧第二支撑杆48可以与底板45销轴转动连接处为顶点顶端向前侧上方或向后侧下方转动,后侧第二支撑杆48可以与限位插块49销轴转动连接处为顶点自身底端在第二限位滑块47的限位作用下向前侧或向后侧移动。
[0031]
作为优选方案,更进一步的,高度调节机构4还包括;限位插块49、螺杆410和螺母411;限位插块49通过销轴转动连接在后侧第一支撑杆44的底端和后侧第二支撑杆48的顶端通过销轴转动连接;螺杆410沿前后方向插接在限位插块49的内腔前侧,螺杆410的后端贯穿限位插块49的内腔;螺母411通过销轴转动连接在前侧第一支撑杆44的底端和前侧第二支撑杆48的顶端通过销轴转动连接,螺母411的内腔与螺杆410的外壁后侧相螺接,螺母411可在螺杆410旋转力的作用下向前侧或向后侧移动。
[0032]
作为优选方案,更进一步的,浮力机构6包括;浮力机构61、安装板62、底座611、转轴63、从动齿轮64、转动杆65、涡卷弹簧66、主动齿轮67、永磁板68、电磁板69和遇水自膨胀气囊610;浮力机构61设置在起落架5的低端凹槽处;安装板62沿上下方向设置在浮力机构61的底端中心位置;底座611设置在安装板62的底端;转轴63的数量为四个,四个转轴63以安装板62的轴心为圆心沿周向间隔90度通过轴承转动连接在底座611的顶端外侧,轴承的内环与转轴63的外壁过盈配合,且轴承的外环与底座611的外壁固定连接;从动齿轮64的数量为四个,四个从动齿轮64分别设置在四个转轴63的顶端,从动齿轮64可在主动齿轮67旋转力的作用下向相反方向转动;转动杆65的数量为四个,四个转动杆65的一端分别过盈配合在四个转轴63的外壁,且转动杆65的另一端延伸出底座611的外侧,转动杆65的形状为弧形并与底座611的外侧凹槽相适配;涡卷弹簧66过盈配合在安装板62的外壁顶端,涡卷弹簧66为压缩弹簧,涡卷弹簧66受到拉伸或挤压后产生弹性形变,去除外力后恢复至初始状态;主动齿轮67过盈配合在涡卷弹簧66的外壁,主动齿轮67的外侧分别与四个从动齿轮64相啮合;永磁板68的数控为四个,四个永磁板68以安装板62的轴心为圆心沿周向间隔90度设置在主动齿轮67的顶端;电磁板69设置在浮力机构61的低端,电磁板69的底端可分别与四个永磁板68的顶端磁性相吸,电磁板69和控制器2电性连接,电磁板69具体使用型号根据实际
使用要求直接从市场上购买安装并使用的,电磁板69内部设置有无线网络模块进而由工作人员远程进行控制;遇水自膨胀气囊610的数量为四组,每组遇水自膨胀气囊610的数量数量为若干个,四组遇水自膨胀气囊610间歇设置在转动杆65的内侧,遇水自膨胀气囊610表面遇水后膨胀以增大浮力。
[0033]
通过本领域人员,可将本案中所有电气件与外部适配的电源通过导线进行连接,并且应该根据具体实际使用情况,选择相适配的外部控制器进行连接,以满足对所有电器件的控制需求,其具体连接方式以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,不在进行说明,下述主要介绍工作原理以及过程,具体工作如下。
[0034]
步骤1:当多旋翼无人机1运载件高度出现变化需要进行调整时,工作人员依次转动左右两个高度调节机构4内的螺杆410,由于螺杆410和螺母411相螺接,促使螺母411在螺杆410旋转力的作用下向前侧移动,并带动限位插块49向后侧移动,由于前侧限位插块44底端和前侧第二支撑杆48的顶端均与螺母411通过销轴转动连接,促使螺母411向前侧移动过程中带动前侧第一支撑杆44底端和第二支撑杆48的顶端均向前侧移动,并由于前侧第一支撑杆44顶端于顶板41通过销轴转动连接,且前侧第二支撑杆48底端与底板45通过销轴转动连接,促使前侧第一支撑杆44以与顶板41销轴转动连接处为顶点低端向前侧转动,前侧第二支撑杆48以与底板45销轴转动连接处为顶点顶端向前侧上方转动,由于前后两个第一支撑杆44以第二支撑杆48交叉设置且交叉为通过销轴转动连接,并且后侧第一支撑杆44和第二支撑杆48的顶端和低端分别与第一限位滑块43和第二限位滑块47通过销轴转动连接,限位插块49带动后侧第二支撑杆48顶端和后侧第一支撑杆44的底端均向后侧移动,进而使后侧第一支撑杆44以与限位插块49销轴转动连接处为顶点自身顶端在第一限位滑块43的限位作用下向前侧移动,后侧第二支撑杆48以与限位插块49销轴转动连接处为顶点自身底端在第二限位滑块47的限位作用下向前侧移动,促使前后两个第一支撑杆44和第二支撑杆48之间的夹角均变小,进而在底板45的配合下推动起落架5向下移动至指定位置,进而改变多旋翼无人机1驻停时自身内侧高度,以便于挂载不同高度大小的运载件;
[0035]
步骤2:在多旋翼无人机1进行降落时,起落架5在多旋翼无人机1降落过程中受到地面冲击力并由对应位置上的高度调节机构4传导致左右两侧的前后两个减震机构3内的插块32上,插块32向上移动同时挤压减震弹簧34以对冲击力进行吸收,进而起到对多旋翼无人机1降落时的缓冲作用,减震弹簧34自身弹性作用下受挤压释放后的弹力被减震阻尼器33吸收以减弱,防止多旋翼无人机1颠簸损坏;
[0036]
步骤3:当多旋翼无人机1受到故障及外部不可控力的影响下被迫降落至沼泽湖面等地点时,工作人员控制控制器2同步关闭四个浮力机构6内的电磁板69,促使电磁板69停止与当前位置上的永磁板68磁性相吸进而解除对主动齿轮67的固定,涡卷弹簧66在自身弹性作用下驱动主动齿轮67转动,主动齿轮67转动至下一永磁板68移动至电磁板69对应位置处,高度调节机构4控制电磁板69与下一个永磁板68磁性相吸以对当前位置上的转动杆65进行固定,由于从动齿轮64与主动齿轮67啮合,促使从动齿轮64在主动齿轮67旋转力的作用下向相反方向转动,进而使从动齿轮64驱动对应位置上的转轴63带动转动杆65向外侧转动进而伸出至底座611外侧,遇水自膨胀气囊610表面遇水后膨胀,进而增大多旋翼无人机1低端与沼泽或湖面的接触面积和浮力,以防止多旋翼无人机1沉入内部;
[0037]
从而可实现水利用无人机起落架的高度调整,进而可运载体积高度不同大小的装置和货物,提高装置适用性,并且当无人机被迫降落在湖泊或沼泽内,可改变无人机浮力大小,避免无人机沉入内部造成损失。
[0038]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips