
 商标分类
商标分类  商标转让
商标转让 
一种基于无人机的火力发电厂四管智能检测装置及方法与流程
 2021-02-13 18:02:48|
2021-02-13 18:02:48| 129|
129| 起点商标网
起点商标网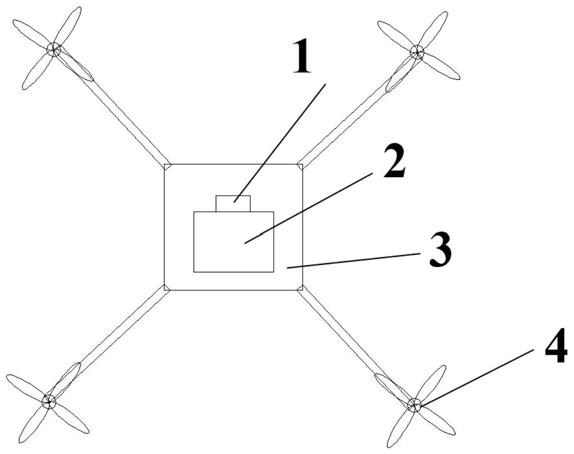
[0001]
本发明属于锅炉及相似密闭空间检测领域,尤其涉及一种基于无人机的火力发电厂四管智能检测装置及方法。
背景技术:
[0002]
锅炉作为火力发电厂三大主机之一的主设备,主要由水冷壁、过热器、再热器、省煤器、联箱、汽水连接管等设备组成,据统计,锅炉受热面四管爆漏事件占机组非计划停运事件的50%左右,个别火电厂受热面爆漏事件甚至高达65%,所以做好锅炉受热面四管爆漏预防工作,对于有效减少机组非计划停运次数,提高设备健康水平意义重大。通过对常规电厂四管防磨防爆检查现状进行研究,炉膛内水冷壁的主要检测方法为目视检查和壁厚测量,壁厚测量是基于目视发现管壁发生磨损或腐蚀情况后的精准测量。因此为实现现有检查项目,应用无人机是最好选择,通过搭载高清视频采集系统,可实现基于视觉的锅炉四管防磨防爆检查,同时相比于爬行机器人,其检测速度更快,对于空间结构适用性更广。
[0003]
炉膛内壁是一个密闭空间,传统无人机gps模块无法搜到卫星。无法进行定位。此时需采用新型空间坐标系构建系统对炉膛内壁进行坐标点构建,没有坐标,无人机就无法按照特定的轨迹进行自动巡航。而相关论文专利提出的定位方式,如激光测距定位、微波雷达定位和超声波定位等并不能满足定位要求,因此需要一种能够解决以上限制的火力发电厂四管智能检测的无人机装置。
技术实现要素:
[0004]
本发明的目的是提供一种基于无人机的火力发电厂四管智能检测装置及方法,应用无人机搭载图像采集系统、照明系统、定位系统,通过上下相机云台的图像采集功能,结合锅炉实际尺寸,实现简单飞行条件下的炉膛内全景拍照,消除由于无人机无法在炉内设定巡查轨迹,从而使得检测无法全面覆盖的劣势。
[0005]
本发明提供了一种基于无人机的火力发电厂四管智能检测装置,包括无人机飞行器,所述无人机飞行器采用x型布局四旋翼无人机;
[0006]
所述无人机飞行器设有上置云台、下置云台及无人机支架;所述上置云台安装有上置相机,所述下置云台安装有下置相机及下置红外光学定位系统;所述无人机支架安装有外置光源;
[0007]
所述上置云台及下置云台采用可360度旋转的云台;
[0008]
所述上置相机及下置相机采用可变焦高清摄像机,用于采集火力发电厂四管的图像信息;
[0009]
所述下置红外光学定位系统用于通过向下部地面发射红外线进行实时飞行高度测定;
[0010]
所述外置光源用于通过外接遥控器对光源照射角度和亮度进行调整。
[0011]
本发明还提供了一种应用所述装置的检测方法,包括:
[0012]
步骤1,无人机飞行器从底面起飞,起飞高度为上置相机及下置相机在上置云台及下置云台的带动下旋转360度进行全景数据采集,外置光源的照射角度在遥控器的控制下与上置相机及下置相机的拍摄角度同步,完成本区域检测;其中,a为固定位置的图像采集高度,2b为锅炉宽度,β为相机广角;
[0013]
步骤2,步骤1完成后,无人机飞行器提升高度a,上置相机、下置相机、上置云台、下置云台及外置光源重复步骤1中的操作;
[0014]
步骤3,步骤2完成后,无人机飞行器继续提升高度a进行检测,直至无人机飞行器飞至高度处,完成全部检测工作;其中,h为锅炉高度。
[0015]
借由上述方案,通过基于无人机的火力发电厂四管智能检测装置及方法,能够实现简单飞行条件下的炉膛内全景拍照,消除由于无人机无法在炉内设定巡查轨迹,从而使得检测无法全面覆盖的劣势。
[0016]
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例详细说明如后。
附图说明
[0017]
图1是本发明基于无人机的火力发电厂四管智能检测装置的俯视图;
[0018]
图2是本发明基于无人机的火力发电厂四管智能检测装置的正视图;
[0019]
图3是应用本发明进行现场检测的示意图。
[0020]
图中标记:
[0021]
1-上置相机;2-上置云台;3-无人机飞行器;4-飞行旋翼;5-下置云台,6-下置相机;7-下置红外光学定位系统;8-外置光源;9-无人机支架。
具体实施方式
[0022]
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0023]
参图1、图2所示,本实施例提供了一种基于无人机的火力发电厂四管智能检测装置,包括无人机飞行器3,无人机飞行器3采用x型布局四旋翼无人机;四旋翼无人机飞行器3作为飞行平台集成电机组件、飞行旋翼4、电池、自驾仪以及无线通信模块等设备,飞行旋翼4为无人机飞行器3提供升力,无人机飞行器3用于安装所述电池、通信模块、电机组件等设备,为本领域的常规设置。
[0024]
无人机飞行器3设有上置云台2、下置云台5及无人机支架9;上置云台2安装有上置相机1,下置云台5安装有下置相机6及下置红外光学定位系统7;无人机支架9安装有外置光源8。
[0025]
上置云台2及下置云台5采用可360度旋转的云台;
[0026]
上置相机1及下置相机6采用可变焦高清摄像机,用于采集火力发电厂四管的图像信息;通过将上置相机、下置相机分别设置于无人机飞行器上下两个位置,用于采集锅炉内壁缺陷,可避免无人机本体对图像采集装置造成遮挡。
[0027]
下置红外光学定位系统7用于通过向下部地面发射红外线进行实时飞行高度测定,对无人机飞行器的飞行高度进行定位,且保证无人机垂直上下飞行。
[0028]
外置光源8挂在无人机下支架上,可通过外接遥控器(独立操作系统)对光源照射角度和亮度进行调整。
[0029]
参图3所示,应用前首先了解检测环境,通过获取锅炉高度h和宽度2b,选取合适相机广角β,通过计算可以得出:
[0030]
固定位置的图像采集高度为:
[0031]
固定高度h(锅炉高度)范围的检测需进行采集次数为:h/a。
[0032]
具体检测步骤包括:
[0033]
步骤1,无人机飞行器从底面起飞,起飞高度为上置相机及下置相机在上置云台及下置云台的带动下旋转360度进行全景数据采集,外置光源的照射角度在遥控器的控制下与上置相机及下置相机的拍摄角度同步,完成本区域检测。
[0034]
步骤2,步骤1完成后,无人机飞行器提升高度a,上置相机、下置相机、上置云台、下置云台及外置光源重复步骤1中的操作;
[0035]
步骤3,步骤2完成后,无人机飞行器继续提升高度a进行检测,直至无人机飞行器飞至高度处,完成全部检测工作。
[0036]
该基于无人机的火力发电厂四管智能检测装置,应用无人机搭载图像采集系统(上置相机、下置相机)、照明系统(外置光源)、下置红外光学定位系统,通过上下相机云台的图像采集功能,结合锅炉实际尺寸,实现简单飞行条件下的炉膛内全景拍照,消除由于无人机无法在炉内设定巡查轨迹,从而使得检测无法全面覆盖的劣势。
[0037]
以上所述仅是本发明的优选实施方式,并不用于限制本发明,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips