
 商标分类
商标分类  商标转让
商标转让 
一种无人机吊运模块的制作方法
 2021-02-13 18:02:28|
2021-02-13 18:02:28| 135|
135| 起点商标网
起点商标网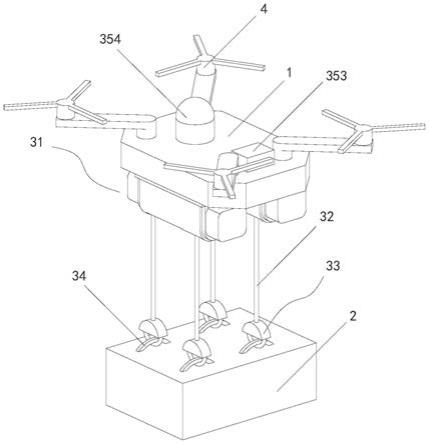
[0001]
本发明涉及无人机吊运领域,尤其涉及一种无人机吊运模块。
背景技术:
[0002]
目前利用无人机吊运可以执行人员救助、装备运输、火灾扑救等各类任务。与吊车类似,执行吊运任务时要求货物快速、准确地实现点对点运送,因此,旋翼飞行器吊运可以看作空中吊车。
[0003]
现有的无人机进行物体吊运时,只能将吊运物通过绳索挂在无人机的机身上,通过无人机的驱动带动吊运物进行运输,进而到达目的地后无人机降落,才能将吊运物取下,但在地形狭窄地区或树林中无人机很难进行降落,从而无法对吊运物进行取拿。
技术实现要素:
[0004]
本发明的目的在于提供一种无人机吊运模块,旨在解决现有技术中的无人机的驱动带动吊运物进行运输,进而到达目的地后无人机降落,才能将吊运物取下,但在地形狭窄地区或树林中无人机很难进行降落,从而无法对吊运物进行取拿的技术问题。
[0005]
为实现上述目的,本发明采用的一种无人机吊运模块,所述挂载装置包括绞车、铰绳、挂钩、连接卡扣和监测组件,所述绞车与所述机体固定连接,并位于所述机体靠近所述吊笼的一侧,所述铰绳的一端与所述绞车的输出端连接,并另一端与所述吊笼可拆卸连接,且位于所述绞车靠近所述吊笼的一侧,所述挂钩与所述铰绳固定连接,并与所述吊笼可拆卸连接,所述连接卡扣与所述吊笼固定连接,并与所述挂钩可拆卸连接,且位于所述吊笼靠近所述挂钩的一侧,所述监测组件与所述机体固定连接,并与所述挂钩固定连接;所述挂钩包括连接壳体、悬挂臂和转向电机,所述连接壳体与所述铰绳固定连接,并位于所述铰绳靠近所述吊笼的一端,所述悬挂臂与所述连接壳体转动连接,并与所述连接卡扣抵接,且位于所述连接壳体靠近所述连接卡扣的一侧,所述转向电机与所述连接壳体固定连接,并输出轴与所述悬挂臂转动连接,且位于所述连接壳体靠近所述悬挂臂的一侧。
[0006]
其中,所述监测组件包括测距传感器和第一白光红外两用摄像头,所述测距传感器与所述连接壳体固定连接,并位于所述连接壳体靠近所述悬挂臂的一侧;所述第一白光红外两用摄像头与所述连接壳体固定连接,并位于所述连接壳体靠近所述测距传感器的一侧。
[0007]
其中,所述监测组件还包括高度传感器和第二白光红外两用摄像头,所述高度传感器与所述机体固定连接,并位于所述机体远离所述吊笼的一侧;所述第二白光红外两用摄像头与所述机体固定连接,并位于所述机体靠近所述高度传感器的一侧。
[0008]
其中,所述监测组件还包括重量传感器,所述重量传感器与所述连接壳体固定连接,并位于所述连接壳体靠近所述悬挂臂的一侧。
[0009]
其中,所述绞车包括滚筒、铰接螺杆和铰接驱动构件,所述滚筒与所述机体固定连接,并位于所述机体靠近所述吊笼的一侧;所述铰接螺杆与所述滚筒转动连接,并与所述铰
绳转动连接,且位于所述滚筒靠近所述铰绳的一侧;所述铰接驱动组件与所述滚筒固定连接,并与所述铰接螺杆转动连接。
[0010]
其中,所述铰接驱动构件包括连接轴承和铰接电机,所述连接轴承与所述滚筒固定连接,并与所述铰接螺杆转动连接,且位于所述滚筒靠近所述铰接螺杆的一侧;所述铰接电机与所述滚筒固定连接,并输出轴与所述连接轴承转动连接,且位于所述滚筒靠近所述连接轴承的一侧。
[0011]
其中,所述铰接驱动构件还包括紧固盖板,所述紧固盖板与所述机体固定连接,并与所述滚筒固定连接,且位于所述滚筒靠近所述机体的一侧。
[0012]
其中,所述无人机吊运模块还包括旋翼,所述旋翼与所述机体转动连接,并位于所述机体远离所述吊笼的一侧。
[0013]
本发明的一种无人机吊运模块,在对所述吊笼进行运输时,所述转向电机驱动所述悬挂臂转动,使得所述悬挂臂贯穿所述连接卡扣,并使所述悬挂臂继续转动,使得所述悬挂臂对所述连接壳体进行闭合,从而无人机带动所述吊笼飞行,在对所述吊笼进行放置时,驱动所述绞车转动,从而放下所述铰绳,使位于所述铰绳端部的所述吊笼降落,在无人机无法降落时,通过所述监测组件监测无人机的飞行情况,控制所述转向电机转动,进而带动所述悬挂臂与所述连接壳体转动,从而使得所述悬挂臂脱离对所述连接卡扣的支撑,从而使的所述吊笼失去无人机的支撑,从而掉落到指定位置,实现无人机在无法降落的条件下对货物的投放。
附图说明
[0014]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0015]
图1是本发明的无人机吊运模块的整体结构示意图。
[0016]
图2是本发明的绞车的结构示意图。
[0017]
图3是本发明的铰接驱动构件的结构示意图。
[0018]
图4是本发明的挂钩的结构示意图。
[0019]
图中:1-机体、2-吊笼、3-挂载装置、4-旋翼、31-绞车、32-铰绳、33-挂钩、 34-连接卡扣、35-监测组件、100-无人机吊运模块、311-滚筒、312-铰接螺杆、 313-铰接驱动构件、331-连接壳体、332-悬挂臂、333-转向电机、351-测距传感器、352-第一白光红外两用摄像头、353-高度传感器、354-第二白光红外两用摄像头、355-重量传感器、3131-连接轴承、3132-铰接电机、3133-紧固盖板。
具体实施方式
[0020]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0021]
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、
“
左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0022]
参阅图1至图4,本发明提供了一种无人机吊运模块100,包括机体1、吊笼2和挂载装置3;所述挂载装置3包括绞车31、铰绳32、挂钩33、连接卡扣 34和监测组件35,所述绞车31与所述机体1固定连接,并位于所述机体1靠近所述吊笼2的一侧,所述铰绳32的一端与所述绞车31的输出端连接,并另一端与所述吊笼2可拆卸连接,且位于所述绞车31靠近所述吊笼2的一侧,所述挂钩33与所述铰绳32固定连接,并与所述吊笼2可拆卸连接,所述连接卡扣34与所述吊笼2固定连接,并与所述挂钩33可拆卸连接,且位于所述吊笼2 靠近所述挂钩33的一侧,所述监测组件35与所述机体1固定连接,并与所述挂钩33固定连接;所述挂钩33包括连接壳体331、悬挂臂332和转向电机333,所述连接壳体331与所述铰绳32固定连接,并位于所述铰绳32靠近所述吊笼2 的一端,所述悬挂臂332与所述连接壳体331转动连接,并与所述连接卡扣34 抵接,且位于所述连接壳体331靠近所述连接卡扣34的一侧,所述转向电机333 与所述连接壳体331固定连接,并输出轴与所述悬挂臂332转动连接,且位于所述连接壳体331靠近所述悬挂臂332的一侧。
[0023]
在本实施方式中,所述机体1为无人机的机身部分,并在所述机体1的内部安装有控制器和驱动设备,所述机体1的两侧分别安装有两个所述绞车31,并每个绞车31分别挂载有两根所述铰绳32,通过所述绞车31对所述铰绳32进行收放,每根所述铰绳32的底部安装有所述挂钩33,所述挂钩33的顶部为所述连接壳体331,所述连接壳体331的截面为半圆状,并内部中空,所述连接壳体331的侧面螺纹安装有支撑板,并在支撑板上螺纹安装有所述转向电机333,所述转向电机333的输出轴贯穿所述连接壳体331的支撑板,与所述悬挂臂332 的螺纹配合,所述悬挂臂332为弧形圆柱体,并在端部通过支架与所述转向电机333的输出轴连接,从而通过所述输出电机的转动,带动所述悬挂臂332朝向所述连接壳体331的内部伸缩,所述悬挂臂332的自由端可与所述连接壳体 331抵接,从而使所述悬挂臂332和所述连接壳体331形成一个圆环,所述连接卡扣34螺纹固定在所述吊笼2的顶部,所述连接卡扣34的外形为一个闭合的圆环,所述悬挂臂332可贯穿所述连接卡扣34中心位置的圆环,从而使所述连接卡扣34与所述挂钩33连接,如此,在对所述吊笼2进行运输时,所述转向电机333驱动所述悬挂臂332转动,使得所述悬挂臂332贯穿所述连接卡扣34,并使所述悬挂臂332继续转动,使得所述悬挂臂332对所述连接壳体331进行闭合,从而无人机带动所述吊笼2飞行,在对所述吊笼2进行放置时,驱动所述绞车31转动,从而放下所述铰绳32,使位于所述铰绳32端部的所述吊笼2 降落,在无人机无法降落时,通过所述监测组件35监测无人机的飞行情况,控制所述转向电机333转动,进而带动所述悬挂臂332与所述连接壳体331转动,从而使得所述悬挂臂332脱离对所述连接卡扣34的支撑,从而使的所述吊笼2 失去无人机的支撑,从而掉落到指定位置,实现无人机在无法降落的条件下对货物的投放。
[0024]
进一步地,请参阅图4,所述监测组件35包括测距传感器351和第一白光红外两用摄像头352,所述测距传感器351与所述连接壳体331固定连接,并位于所述连接壳体331靠近所述悬挂臂332的一侧;所述第一白光红外两用摄像头352与所述连接壳体331固定连接,并位于所述连接壳体331靠近所述测距传感器351的一侧。
[0025]
在本实施方式中,在所述无人机底部靠近所述挂钩33位置安装有型号为 gp2y0a21yk0f的所述测距传感器351和所述第一白光红外两用摄像头352,所述第一白光红外两用摄像头352对所述挂钩33和所述连接卡扣34的连接位置进行全程监控,并通过所述测距传感器351对所述悬挂臂332和所述连接卡扣34之间的连接距离进行实时反馈,并将数据传输到处理器进行比对分析,从而通过处理器对所述转向电机333发出控制信号,从而可自动识别货物脱钩或已经挂载并闭锁确认进行下一步工作,同时操作人员可进行远程实时控制和测量,增强了无人机的实用性。
[0026]
进一步地,请参阅图1,所述监测组件35还包括高度传感器353和第二白光红外两用摄像头354,所述高度传感器353与所述机体1固定连接,并位于所述机体1远离所述吊笼2的一侧;所述第二白光红外两用摄像头354与所述机体1固定连接,并位于所述机体1靠近所述高度传感器353的一侧。
[0027]
在本实施方式中,所述高度传感器353的型号为xgzp040db1f,所述高度传感器353安装在所述机体1的上表面,并实时监测无人机的飞行高度,所述第二白光红外两用摄像头354可进行360度旋转,从而对无人机外周的环境进行视频实时传输,操作人员对视频信息和高度信息进行观察后判断无人机的飞行路线。
[0028]
进一步地,请参阅图4,所述监测组件35还包括重量传感器355,所述重量传感器355与所述连接壳体331固定连接,并位于所述连接壳体331靠近所述悬挂臂332的一侧。
[0029]
在本实施方式中,所述重量传感器355安装在所述挂钩33上,对所述挂钩 33所受到的承载力进行实时测量,并将信号传输到处理器,处理器通过数据对比所述挂钩33对所述吊笼2的支撑力,从而自动识别货物脱钩或已经挂载。
[0030]
进一步地,请参阅图2和图3,所述绞车31包括滚筒311、铰接螺杆312 和铰接驱动构件313,所述滚筒311与所述机体1固定连接,并位于所述机体1 靠近所述吊笼2的一侧;所述铰接螺杆312与所述滚筒311转动连接,并与所述铰绳32转动连接,且位于所述滚筒311靠近所述铰绳32的一侧;所述铰接驱动组件与所述滚筒311固定连接,并与所述铰接螺杆312转动连接。
[0031]
在本实施方式中,所述滚筒311为内部中空的圆柱体,并螺纹固定在所述机体1的顶部,在所述滚筒311的底部具有开口,并在所述滚筒311的内部通过所述铰接驱动构件313安装有所述铰接螺杆312,所述铰接螺杆312对所述绞线进行缠绕,并通过所述铰接驱动构件313驱动所述铰接螺杆312转动,从而对所述绞线进行收放。
[0032]
进一步地,请参阅图3和图4,所述铰接驱动构件313包括连接轴承3131 和铰接电机3132,所述连接轴承3131与所述滚筒311固定连接,并与所述铰接螺杆312转动连接,且位于所述滚筒311靠近所述铰接螺杆312的一侧;所述铰接电机3132与所述滚筒311固定连接,并输出轴与所述连接轴承3131转动连接,且位于所述滚筒311靠近所述连接轴承3131的一侧。
[0033]
在本实施方式中,所述连接转轴螺纹固定在所述滚筒311的内侧,并通过旋转环与所述铰接螺杆312转动连接,从而对所述铰接螺杆312的两侧端进行旋转支撑,所述铰接电机3132螺纹固定在所述滚筒311的外侧面,并输出轴伸入所述连接轴承3131内与所述连接轴承3131的旋转环螺纹连接,从而通过所述铰接电机3132驱动所述连接轴承3131转动,进而带动所述铰接螺杆312转动。
[0034]
进一步地,请参阅图3和图4,所述铰接驱动构件313还包括紧固盖板3133,所述紧固盖板3133与所述机体1固定连接,并与所述滚筒311固定连接,且位于所述滚筒311靠近所述机体1的一侧。
[0035]
在本实施方式中,所述紧固盖板3133与所述螺纹固定在所述机体1的底部,并通过螺栓对所述滚筒311进行螺杆固定,从而使得所述绞车31在对所述绞线进行收放过程中所述滚筒311保持固定。
[0036]
进一步地,请参阅图1,所述无人机吊运模块100还包括旋翼4,所述旋翼 4与所述机体1转动连接,并位于所述机体1远离所述吊笼2的一侧。
[0037]
在本实施方式中,所述旋翼4为无人机的驱动装置,通过所述机体1内部的驱动设备驱动所述所述旋翼4转动,进而通过反向气流带动无人机进行升降和飞行。
[0038]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips