
 商标分类
商标分类  商标转让
商标转让 
一种用于高空清洁玻璃的无人机的制作方法
 2021-02-13 18:02:23|
2021-02-13 18:02:23| 75|
75| 起点商标网
起点商标网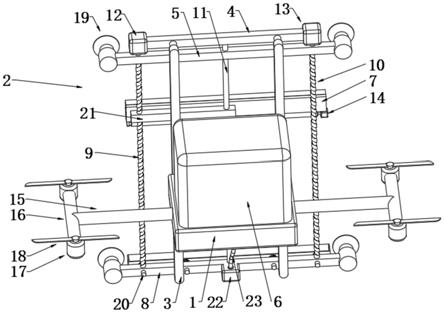
[0001]
本发明涉及无人机技术领域,具体是一种用于高空清洁玻璃的无人机。
背景技术:
[0002]
无人机最开始是应用于军队,作为一种非常便利,又低风险的无人机器,通常被用来做无人机侦查,监视与打击恐怖主义的工作,随着无人机技术的飞速发展,无人机不仅仅局限于军用领域,在民用领域,例如农用洒水无人机、森林火灾监控无人机、航拍无人机等。
[0003]
在高楼林立的今天,很多高楼都是装配有全景玻璃,而对高层建筑上全景玻璃的清洗工作主要由人工完成,清洗工人搭乘带吊篮或腰系绳索进行高空擦洗,稍有不慎就会出现安全事故。
技术实现要素:
[0004]
本发明的目的在于提供一种用于高空清洁玻璃的无人机,以解决上述背景技术中提出的问题。
[0005]
为实现上述目的,本发明提供如下技术方案:一种用于高空清洁玻璃的无人机,包括无人机主体,无人机主体的两侧对称布设有连接杆,连接杆的一端与无人机主体连接,另一端上设有安装杆,安装杆上均匀布设有多个动力电机,动力电机的输出端上设有旋翼,所述无人机主体的一侧设有清洁机构,清洁机构包括上固定杆、活动杆、安装板和下固定杆,所述无人机主体的一侧设有竖杆,竖杆的一端与上固定杆连接,另一端与下固定杆连接,所述上固定杆的两端分别设有第一调节电机和第二调节电机,第一调节电机和第二调节电机的输出端上分别设有第一螺纹杆和第二螺纹杆,所述第一螺纹杆和第二螺纹杆的一端分别与第一调节电机和第二调节电机的输出端连接,另一端与下固定杆转动连接,所述上固定杆与下固定杆之间设有限位杆,限位杆的一端与上固定杆连接,另一端与下固定杆连接,所述活动杆和下固定杆的两端分别设有玻璃固定机构,所述第二螺纹杆与活动杆螺纹连接,限位杆与活动杆滑动连接,所述活动杆的下方设有清洁板,第一螺纹杆与设置在清洁板一侧的连接板螺纹连接,限位杆与连接板滑动连接,所述清洁板的另一侧设有清理机构。
[0006]
作为本发明进一步的方案:所述清理机构包括设置在清洁板的粗毛刷和细毛刷,粗毛刷设置在细毛刷的下方,所述清洁板的下方设有管道,管道的一侧均匀布设有多个喷头,喷头与管道连通,所述管道的另一侧设有软管的一端与管道连通,另一端与设置在无人机主体中的水泵的出水口连通,水泵的进水口与设置在无人机主体上的水箱连通。
[0007]
作为本发明再进一步的方案:所述管道的一端与设置在清洁板下方的转动电机的输出端连接。
[0008]
作为本发明再进一步的方案:所述安装杆的两端分别布设有一个动力电机,动力电机的输出端上设有旋翼。
[0009]
作为本发明再进一步的方案:所述玻璃固定机构包括吸盘嘴、滑块和固定块,滑块
的一端与吸盘嘴连接,另一端与固定块的一端内腔滑动连接,且滑块中设有的通孔与内腔连通,所述内腔中设有弹簧,弹簧的一端与滑块连接,另一端与设置在固定块的另一端内腔设有气泵连接。
[0010]
作为本发明再进一步的方案:所述下固定杆的一侧设有盛液板,盛液板上设有凹槽,所述盛液板的一侧设有均匀布设有多个滑杆,滑杆的一端与盛液板连接,另一端与下固定杆滑动连接,所述滑杆外套有压紧弹簧,压紧弹簧的一端与盛液板连接,另一端与下固定杆连接。
[0011]
作为本发明再进一步的方案:所述凹槽的一侧设有斜面,另一侧设有废液出口,废液出口与设置在下固定杆一侧的抽污泵连通,所述抽污泵通过连接管道与设置在无人机主体中的废液处理机构连通,废液处理机构与水箱连通。
[0012]
与现有技术相比,本发明的有益效果是:1.通过无人机代替人工高空清理玻璃,不仅可以减少安全隐患,同时可以提高玻璃清理效率。
[0013]
2.通过吸盘嘴与玻璃之间形成负压,将无人机固定在玻璃上的同时,固定块的内腔中形成负压,使滑块向后运动并压缩弹簧,让粗毛刷和细毛刷能更好的贴合在玻璃上进行清洁,提高无人机的清洁效果。
[0014]
3.通过活动杆和下固定杆的玻璃固定机构的配合运动,可以使无人机稳定的在玻璃上运动并工作,提高了无人机的清洁时的稳定性。
[0015]
4.盛液板可以盛装由高空落下的清洁液,再通过抽污泵将凹槽中的废液输送至废液处理机构进行处理,使处理完的废液再输送至水箱进行循环利用,提高了无人机的环保性能。
附图说明
[0016]
图1为用于高空清洁玻璃的无人机的结构示意图。
[0017]
图2为用于高空清洁玻璃的无人机中清洁机构的结构示意图。
[0018]
图3为用于高空清洁玻璃的无人机中下固定杆的结构示意图。
[0019]
图4为用于高空清洁玻璃的无人机中清洁板的结构示意图。
[0020]
图5为用于高空清洁玻璃的无人机中玻璃固定机构的结构示意图。
[0021]
1-无人机主体、2-清洁机构、3-竖杆、4-上固定杆、5-活动杆、6-水箱、7-清洁板、8-下固定杆、9-第一螺纹杆、10-第二螺纹杆、11-限位杆、12-第一调节电机、13-第二调节电机、14-转动电机、15-连接杆、16-安装杆、17-动力电机、18-旋翼、19-玻璃固定机构、20-滑杆、21-连接板、22-抽污泵、23-连接管道、24-废液出口、25-盛液板、26-凹槽、27-压紧弹簧、28-软管、29-细毛刷、30-粗毛刷、31-管道、32-气泵、33-吸盘嘴、34-滑块、35-固定块、36-弹簧。
具体实施方式
[0022]
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
[0023]
以下实施例会结合附图对本发明进行详述,在附图或说明中,相似或相同的部分使用相同的标号,并且在实际应用中,各部件的形状、厚度或高度可扩大或缩小。本发明所
列举的各实施例仅用以说明本发明,并非用以限制本发明的范围。对本发明所作的任何显而易知的修饰或变更都不脱离本发明的精神与范围。
[0024]
实施例1请参阅图1-5,一种用于高空清洁玻璃的无人机,包括无人机主体1,无人机主体1的两侧对称布设有连接杆15,连接杆15的一端与无人机主体1连接,另一端上设有安装杆16,安装杆16上均匀布设有多个动力电机17,动力电机17的输出端上设有旋翼18,通过动力电机17驱动旋翼18转动,从而产生升力使无人机飞行,所述无人机主体1的一侧设有清洁机构2,清洁机构2包括上固定杆4、活动杆5、安装板7和下固定杆8,所述无人机主体1的一侧设有竖杆3,竖杆3的一端与上固定杆4连接,另一端与下固定杆8连接,所述上固定杆4的两端分别设有第一调节电机12和第二调节电机13,第一调节电机12和第二调节电机13的输出端上分别设有第一螺纹杆9和第二螺纹杆10,所述第一螺纹杆9和第二螺纹杆10的一端分别与第一调节电机12和第二调节电机13的输出端连接,另一端与下固定杆8转动连接,通过第一调节电机12和第二调节电机13可带动第一螺纹杆9和第二螺纹杆10转动,所述上固定杆4与下固定杆8之间设有限位杆11,限位杆11的一端与上固定杆4连接,另一端与下固定杆8连接,所述活动杆5和下固定杆8的两端分别设有玻璃固定机构19,通过玻璃固定机构19可使无人机固定在玻璃表面,所述第二螺纹杆10与活动杆5螺纹连接,限位杆11与活动杆5滑动连接,通过螺纹杆10的转动可带动活动杆5上下运动,从而方便工作人员调节玻璃固定机构19的固定位置,当无人机需要在玻璃上移动位置时,下固定杆8上的玻璃固定机构19先解除固定,通过螺纹杆10转动,使下固定杆8靠近活动杆5,再通过下固定杆8上的玻璃固定机构19将无人机固定在玻璃上,活动杆5上的玻璃固定机构19解除固定并远离下固定杆8至一定距离后在固定,从而使无人机可以稳定的在玻璃上运动并工作,所述活动杆5的下方设有清洁板7,第一螺纹杆9与设置在清洁板7一侧的连接板21螺纹连接,限位杆11与连接板21滑动连接,通过第一螺纹杆9的转动可以带动清洁板7上下运动,所述清洁板7的另一侧设有清理机构,通过清理机构可对玻璃表面进行清洁,使用时,无人机飞行到需要清理的位置,再通过玻璃固定机构19将无人机固定在玻璃上,此时,第一调节电机12驱动第一螺纹杆9转动,使清洁板7带动清理机构运动,从而有效的清洁玻璃表面,通过活动杆5和下固定杆8的玻璃固定机构19的配合运动,可以使无人机稳定的在玻璃上运动并工作,提高了无人机的清洁效果。
[0025]
所述清理机构包括设置在清洁板7的粗毛刷30和细毛刷29,粗毛刷30设置在细毛刷29的下方,通过第一螺纹杆9带动清洁板7运动,使粗毛刷30和细毛刷29依次清洁玻璃表面,所述清洁板7的下方设有管道31,管道31的一侧均匀布设有多个喷头,喷头与管道31连通,通过喷头可将管道31内的清洁液喷在玻璃表面,所述管道31的另一侧设有软管28的一端与管道31连通,另一端与设置在无人机主体1中的水泵的出水口连通,水泵的进水口与设置在无人机主体1上的水箱6连通,通过水泵将水箱6中清洁液通过软管28输送至管道31中,再通过喷头将管道31内的清洁液喷在玻璃表面,使粗毛刷30和细毛刷29能更有效的清理掉玻璃表面的污渍。
[0026]
所述管道31的一端与设置在清洁板7下方的转动电机14的输出端连接,通过转动电机14可驱动管道31转动,便于调节喷头喷射清洁液的角度。
[0027]
所述安装杆16的两端分别布设有一个动力电机17,动力电机17的输出端上设有旋翼18,通过动力电机17驱动旋翼18转动,从而产生升力使无人机飞行。
[0028]
所述玻璃固定机构19包括吸盘嘴33、滑块34和固定块35,滑块34的一端与吸盘嘴33连接,另一端与固定块35的一端内腔滑动连接,且滑块34中设有的通孔与内腔连通,所述内腔中设有弹簧36,弹簧36的一端与滑块34连接,另一端与设置在固定块35的另一端内腔设有气泵32连接,通过气泵32可以抽取吸盘嘴33上的空气,使吸盘嘴33与玻璃之间形成负压,从而使无人机固定在玻璃上,同时,气泵32抽取空气形成负压,使滑块34向后运动压缩弹簧36,使粗毛刷30和细毛刷29能更好的贴合在玻璃上进行清洁。
[0029]
本实施例的工作原理是:使用时,通过动力电机17驱动旋翼18转动,从而产生升力使无人机飞行到需要清理的位置,使吸盘嘴33接触玻璃表面,通过气泵32抽取吸盘嘴33上的空气,使吸盘嘴33与玻璃之间形成负压,将无人机固定在玻璃上,此时,第一调节电机12驱动第一螺纹杆9转动,使清洁板7带动清理机构运动,使喷头将管道31内的清洁液喷在玻璃表面,让粗毛刷30和细毛刷29能更有效的清理掉玻璃表面的污渍,通过活动杆5和下固定杆8的玻璃固定机构19的配合运动,可以使无人机稳定的在玻璃上运动并工作,提高了无人机的清洁效果。
[0030]
实施例2为了避免喷头喷出的清洁液由高空落下造成污染和安全隐患,本实施例在实施例1的基础上进一步改进,改进之处为:所述下固定杆8的一侧设有盛液板25,盛液板25上设有凹槽26,通过凹槽26可以盛装落下的清洁液,避免清洁液由高空直接落下,所述盛液板25的一侧设有均匀布设有多个滑杆20,滑杆20的一端与盛液板25连接,另一端与下固定杆8滑动连接,所述滑杆20外套有压紧弹簧27,压紧弹簧27的一端与盛液板25连接,另一端与下固定杆8连接,使用时,玻璃固定机构19将无人机固定在玻璃上,使盛液板25在压紧弹簧27的作用下贴紧玻璃表面,从而更好的盛装从玻璃上留下的清洁液。
[0031]
所述凹槽26的一侧设有斜面26,另一侧设有废液出口24,废液出口24与设置在下固定杆8一侧的抽污泵22连通,所述抽污泵22通过连接管道23与设置在无人机主体1中的废液处理机构连通,废液处理机构与水箱6连通,使用时,通过抽污泵22将凹槽26中的废液输送至废液处理机构进行处理,处理完的废液再输送至水箱6进行循环利用,提高了无人机的环保性能。
[0032]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
[0033]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips