
 商标分类
商标分类  商标转让
商标转让 
机臂组件及无人机的制作方法
 2021-02-13 17:02:32|
2021-02-13 17:02:32| 226|
226| 起点商标网
起点商标网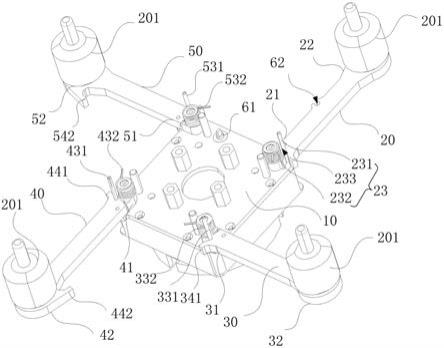
[0001]
本实用新型涉及无人机领域,更具体地,涉及一种机臂组件及无人机。
背景技术:
[0002]
由于无人机的使用环境越来越复杂,因此对无人机的携带体积、速度、起飞方式和功能灵活性有了更高的要求。目前,无人机普遍存在携带体积大,随身携带不方便的问题。少部分具有收缩结构的无人机也是需要手动才能展开,不能自动展开。
技术实现要素:
[0003]
本实用新型的目的在于克服现有技术存在的上述缺陷,提供一种机臂组件及无人机,能够自动打开机臂。
[0004]
为实现上述目的,本实用新型的技术方案如下:
[0005]
一种机臂组件,包括支撑件以及设置于所述支撑件上的主动弹开机臂、从动弹开机臂、锁止结构、驱动装置、第一弹开组件和第二弹开组件;
[0006]
所述主动弹开机臂包括第一转动端和第一弹开端,所述第一转动端与所述支撑件转动连接,所述从动弹开机臂包括第二转动端和第二弹开端,所述第二转动端与所述支撑件转动连接,
[0007]
所述主动弹开机臂上设有第一卡合结构,所述从动弹开机臂上设有与所述第一卡合结构配合的第二卡合结构,当所述第一卡合结构与所述第二卡合结构卡合连接时,第一弹开端和所述第二弹开端均靠近所述支撑件,此时,所述锁止结构能够将所述主动弹开机臂锁止;
[0008]
所述第一弹开组件与所述主动弹开机臂相连接;
[0009]
所述第二弹开组件与所述从动弹开机臂相连接;
[0010]
所述驱动装置与所述锁止结构相连接,所述驱动装置能够驱动所述锁止结构松开所述主动弹开机臂,此时,所述第一弹开端在所述第一弹开组件的作用下弹开远离所述支撑件,所述第一弹开端弹开驱动所述第一卡合结构松开所述第二卡合结构,所述第二弹开端在所述第二弹开组件的作用下也远离所述支撑件。
[0011]
本实用新型还公开了一种无人机,其包括上述的机臂组件。
[0012]
实施本实用新型实施例,将具有如下有益效果:
[0013]
本实用新型实施例通过设置第一卡合结构和第二卡合结构,使主动弹开机臂的第一弹开部和从动弹开机臂的第二弹开部均靠近支撑件,此时,锁止结构对主动弹开机臂进行锁止,机臂组件处于收缩状态,当弹开时,通过控制用于驱动锁止结构运动的驱动装置,能够控制锁止结构松开主动弹开机臂,主动弹开机臂弹开,此时,第一卡合结构和第二卡合结构松脱,从动弹开机臂也弹开,从而,机臂组件均处于打开状态,因此,通过控制驱动装置,可以实现机臂组件的自动打开。
附图说明
[0014]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0015]
其中:
[0016]
图1是本实用新型一具体实施例的机臂组件在打开时的结构示意图。
[0017]
图2是图1所示的机臂组件在收缩时的结构示意图。
[0018]
图3是图2中a区域的局部放大结构示意图。
[0019]
图4是本实用新型一具体实施例的无人机的爆炸结构示意图。
具体实施方式
[0020]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0021]
本实用新型公开了一种机臂组件100,包括支撑件10以及设置于支撑件10上的主动弹开机臂20、从动弹开机臂、锁止结构、驱动装置70、第一弹开组件23和第二弹开组件;主动弹开机臂20包括第一转动端21和第一弹开端22,第一转动端21与支撑件10转动连接,从动弹开机臂包括第二转动端31和第二弹开端32,第二转动端31与支撑件10转动连接,主动弹开机臂20上设有第一卡合结构,从动弹开机臂上设有与第一卡合结构配合的第二卡合结构;当第一卡合结构与第二卡合结构卡合连接时,第一弹开端22和第二弹开端32均靠近支撑件10,此时,锁止结构能够将主动弹开机臂20锁止,主动弹开机臂20锁止驱动从动弹开机臂也锁止,此时,机臂组件100处于收缩状态。
[0022]
第一弹开组件23与主动弹开机臂20相连接;第二弹开组件与从动弹开机臂相连接;驱动装置70与锁止结构相连接,驱动装置70能够驱动锁止结构松开主动弹开机臂20,此时,主动弹开机臂20在第一弹开组件23的作用下弹开远离支撑件10,主动弹开机臂20弹开驱动第一卡合结构松开第二卡合结构,从动弹开机臂在第二弹开组件的作用下也远离支撑件10,此时机臂组件100处于打开状态。
[0023]
通过控制驱动装置70,实现对锁止结构的运动控制,锁止结构松开主动弹开机臂20,所述主动弹开机臂20在第一弹开组件23的作用下弹开,主动弹开机臂20弹开驱动第一卡合结构和第二卡合结构松脱,使从动弹开机臂也弹开,从而实现机臂组件100的自动打开。因此,通过控制驱动装置70,可以实现机臂组件100的自动打开。
[0024]
由于通过控制驱动装置70可以实现机臂组件100的自动打开,因此,本实用新型的无人机的起飞方式可以不必放在地面进行起飞,可以通过抛飞或空投实现,例如,抛飞或空投过程中,飞行控制模块500通过感知无人机在抛飞过程中的速度和加速度,控制驱动装置70旋转,主动弹开机臂20在第一弹开组件23的作用下弹开,同时,各卡合结构松脱,各从动弹开机臂也被弹开,从而实现机臂组件100的自动弹开,然后进行后续的飞行任务。采用抛飞或空投的起飞方式,可以克服复杂地面无法正常起飞的问题。
[0025]
进一步的,从动弹开机臂的个数可以为n个,n大于等于2,分别为第一从动弹开机臂30、第二从动弹开机臂40、
……
、和第n从动弹开机臂,第一从动弹开机臂30包括第二转动端31和第二弹开端32,第二从动弹开机臂40包括第三转动端41和第三弹开端42,依次类推,第n从动弹开机臂包括第n转动端和第n弹开端,第一转动端21、第二转动端31、第三转动端41、
……
、和第n转动端均与支撑件10转动连接。也就是说,本实用新型的机臂组件100可以包括1个主动弹开机臂20和1个、2个及2个以上的从动弹开机臂,即,本实用新型的机臂组件100可以包括两个、三个、四个、六个或八个等机臂。在本具体实施例中,从动弹开机臂包括第一从动弹开机臂30、第二从动弹开机臂40和第三从动弹开机臂50,第三从动弹开机臂50包括第四转动端51和第四弹开端52。
[0026]
进一步的,当从动弹开机臂为多个时,第一从动弹开机臂30上设有第二卡合结构,第二从动弹开机臂40上设有与第二卡合结构匹配的第三卡合结构,依次类推,第n从动弹开机臂上设有与第n卡合结构匹配的第n+1卡合结构。如此,使各从动弹开机臂和主动弹开机臂20依次卡合连接。当锁止结构锁止主动弹开机臂20时,主动弹开机臂20的第一弹开端22靠近支撑件10,主动弹开机臂20通过上述卡合结构使各从动弹开机臂也都靠近支撑件10,使机臂组件100的所有机臂都处于收缩状态,锁止结构松开主动弹开机臂20时,主动弹开机臂20在第一弹开组件23的作用下弹开,第一卡合结构松开第二卡合结构,第一从动弹开机臂30在第二弹开组件的作用下弹开,第二卡合结构松开第三卡合结构,依次类推,第n+1卡合结构松开第n卡合结构,各从动弹开机臂和主动弹开机臂20均打开。在本具体实施例中,主动弹开机臂20、第一从动弹开机臂30、第二从动弹开机臂40和第三从动弹开机臂50依次卡合连接。
[0027]
进一步的,第一卡合结构包括设置于第一转动端21的第一卡合配合部241,第二卡合结构包括设置于第二弹开端32的与第一卡合配合部241匹配的第二卡合部342和设置于第二转动端31的第二卡合配合部341,第三卡合结构包括设置于第三弹开端42的与第二卡合配合部341匹配的第三卡合部442和设置于第三转动端41的第三卡合配合部441,依次类推,第n+1卡合结构包括设置于第n+1弹开端的与第n卡合配合部配合的第n+1卡合部。即,主动弹开机臂20与各从动弹开机臂依次首尾卡合连接。在本具体实施例中,第一卡合配合部241与第二卡合部342卡合连接,第二卡合配合部341与第三卡合部442卡合连接,第三卡合配合部441与第四卡合部542卡合连接。
[0028]
进一步的,锁止结构包括旋转卡扣61和与旋转卡扣61配合的凹槽62,旋转卡扣61竖直设置于支撑件10上,旋转卡扣61可转动,凹槽62设于主动弹开机臂20上,凹槽62设有开口621,旋转卡扣61的截面为长方形,旋转卡扣61的短边可以通过开口621进出凹槽62,旋转卡扣61的长边的尺寸大于开口621的宽度。当主动弹开机臂20的第一弹开端22靠近支撑件10时,旋转卡扣61的短边从开口621进入凹槽62,进入后,转动旋转卡扣61,旋转卡扣61的长边对应开口621,旋转卡扣61的长边与凹槽62卡合连接,使主动弹开机臂20锁止在收缩状态,再次转动旋转卡扣61,旋转卡扣61的短边对应开口621,主动弹开机臂20在第一弹开组件23的作用下使凹槽62脱离旋转卡扣61,从而打开主动弹开机臂20。
[0029]
在本具体实施例中,驱动装置70位于支撑件10下方,驱动装置70的输出轴与旋转卡扣61相连接。具体的,驱动装置70为电机。
[0030]
进一步的,第一弹开组件23包括第一限位柱231和第一弹性件232,第一弹性件232
设置于主动弹开机臂20与支撑件10的转动连接的转动轴上,第一限位柱231设置于支撑件10上,第一限位柱231用于限制主动弹开机臂20弹开的角度。当主动弹开机臂20弹开时,主动弹开机臂20在第一弹性件232的作用下抵接于第一限位柱231,从而确定主动弹开机臂20打开时的位置。
[0031]
类同的,与各从动弹开机臂相连接的第二弹开组件、第三弹开组件、
……
、和第n弹开组件,均与上述第一弹开组件23结构相同,例如,在本具体实施例中,第二弹开组件包括第二限位柱331和第二弹性件332,第二弹性件332设置于从动弹开机臂与支撑件10的转动连接的转动轴上,第二限位柱331设置于支撑件10上,第二限位柱331用于限制第一从动弹开机臂30弹开的角度。第三弹开组件包括第三限位柱431和第三弹性件432,第四弹开组件包括第四限位柱531和第四弹性件532。
[0032]
进一步的,主动弹开机臂20上设有容纳第一限位柱231的第一限位凹槽233,各从动弹开机臂上也分别设有容纳其相对应的限位柱的限位凹槽。
[0033]
在本实用新型中,主动弹开机臂20的第一弹开端22和各从动弹开机臂的各第二弹开端32均安装有螺旋桨组件200。螺旋桨组件200包括旋转驱动201和螺旋桨202,旋转驱动201固定于各机臂(主动弹开机臂和各从动弹开机臂)的各弹开端(第一弹开端22、第二弹开端32、第三弹开端42、
……
、以及第n+1弹开端),旋转驱动201的输出端连接螺旋桨202。优选的,旋转驱动201为直流无刷电机,螺旋桨202为三叶桨,可以提供无人机更快的飞行速度,以及更高的升力。
[0034]
本实用新型还公开了一种无人机,包括上述的机臂组件100,除此之外,无人机还包括依次位于支撑件10下方的驱动装置控制模块300和电源模块400,以及依次位于支撑件10上方的飞行控制模块500、通讯模块600、储物模块700和定位模块800等,驱动装置控制模块300与驱动装置70电连接,用于控制驱动装置70,在使用过程中可根据使用者的需求更换各模块,例如,选择高机动近距离飞行或远航低噪音飞行等,通过更换定位模块800实现无人机定位方式的转变等,通过无人机模块化的设计,实现无人机使用条件的高适用性,使无人机的功能具有很高的灵活性。无人机还包括支撑架900,用于支撑在地面。
[0035]
以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 无人机

 热门咨询
热门咨询




tips