
 商标分类
商标分类  商标转让
商标转让 
无人机物流柜的制作方法
 2021-02-13 17:02:58|
2021-02-13 17:02:58| 326|
326| 起点商标网
起点商标网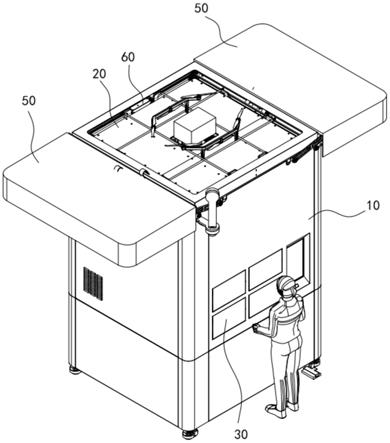
[0001]
本发明涉及物流装置技术领域,具体地说,涉及一种无人机物流柜。
背景技术:
[0002]
现有的物流系统中,末端配送需要快递人员逐个投送快递件,效率较低、配送时间长。特别对于午餐等食品的配送,由于时间要求极为苛刻,快递人员单个配送的方式成本高昂,同时过于严苛的时间要求,导致快递人员经常为了节约时间而闯红灯,生命安全得不到有效保障。
[0003]
中国专利文献201821897134.8,公开一种单元化装载的智能无人中转箱,所述中转箱为内部具有一定体积的箱体,所述中转箱顶部为平面,所述中转箱的顶部平面设有天窗,所述中转箱内部设有用于取放装有货物的置物箱的内部转运组件以及内部控制系统,所述的中转箱内部设有多个用于放置置物箱的置物架;所述的内部转运组件为一维、二维或三维方向活动平台。该中转箱可以实现多个收货地点中转箱的货物转运,解决了用户必须去快递柜取件的技术问题。但是顶部平面没有遮盖,雨水容易下渗而影响使用的可靠性,同时顶面无人机定位图案容易被灰尘遮盖,影响无人机定位效果。
技术实现要素:
[0004]
本发明的目的在于提供一种无人机物流柜,降低配送成本、提高配送效率,可靠性好。
[0005]
本发明公开的无人机物流柜所采用的技术方案是:
[0006]
一种无人机物流柜,包括:柜体;无人机升降平台,设于所述柜体顶部,所述无人机升降平台上设有便于无人机识别定位的图案,所述无人机升降平台上开设有窗口;若干中转箱,设于柜体内,用于存放中转物;内部运转机构,设于柜体内,所述内部运转机构用于自中转箱获取中转物,并将中转物自窗口运送至无人机升降平台;以及遮雨棚机构,用于遮盖无人机升降平台,包括第一遮雨棚、驱动第一遮雨棚的第一雨棚驱动装置、第二遮雨棚、驱动第二遮雨棚的第二雨棚驱动装置,所述第一遮雨棚与第二遮雨棚相对设置,所述第一遮雨棚、第二遮雨棚分别在第一雨棚驱动装置、第二雨棚驱动装置驱动下相合以遮盖无人机升降平台。
[0007]
作为优选方案,还包括无人机定位机构,所述无人机定位机构设于无人机升降平台,用于对无人机进行二次定位,所述无人机定位机构包括第一方向设置的两第一定位轴、驱动两第一定位轴相对或相背运动的第一定位驱动组件、第二方向设置的两第二定位轴、驱动两第二定位轴相对或相背运动的第二定位驱动组件。
[0008]
作为优选方案,所述第一定位驱动组件包括第一定位电机、传动连接第一定位电机的第一传动轴、两分设在第一传动轴两端的第一定位同步带组件、第一导轨以及第一滑块,所述第一滑块分两组,每组第一滑块分设在第一定位轴的两端,其中一组第一滑块连接于第一定位同步带组件的同步带的上层带,另一组第一滑块连接于第一定位同步带组件的
同步带的下层带;
[0009]
所述第二定位驱动组件包括第二定位电机、传动连接第二定位电机的第二传动轴、两分设在第二传动轴两端的第二定位同步带组件、第二导轨以及第二滑块,所述第二滑块分两组,每组第二滑块分设在第二定位轴的两端,其中一组第二滑块连接于第二定位同步带组件的同步带的上层带,另一组第二滑块连接于第二定位同步带组件的同步带的下层带。
[0010]
作为优选方案,还包括用于关闭窗口的关窗机构。
[0011]
作为优选方案,所述关窗机构包括固定于柜体顶板底面的关窗电机、由关窗电机驱动的关窗摆臂、以及设于关窗摆臂的门体,所述关窗电机驱动关窗摆臂摆动,从而使门体翻转至窗口位置以关闭窗口。
[0012]
作为优选方案,所述第一雨棚驱动装置、第二雨棚驱动装置均包括雨棚驱动组件、两平行设置的雨棚转轴、设于一雨棚转轴的第一雨棚摇臂、设于另一雨棚转轴的第二雨棚摇臂,所述雨棚驱动组件用于驱动两雨棚转轴同步转动;其中,第一遮雨棚可转动的连接于第一雨棚驱动装置的第一雨棚摇臂、第二雨棚摇臂,所述第二遮雨棚可转动的连接于第二雨棚驱动装置的第一雨棚摇臂、第二雨棚摇臂。
[0013]
作为优选方案,所述雨棚驱动组件包括雨棚电机、传动连接雨棚电机的涡轮蜗杆减速机、传动连接涡轮蜗杆减速机的输出轴,所述输出轴上设有若干第一同步轮,所述雨棚转轴上设有若干第二同步轮,所述第一同步轮、第二同步轮通过雨棚同步带连接。
[0014]
作为优选方案,两所述雨棚转轴中,靠外设置的一雨棚转轴上设有限位轴承座,所述限位轴承座上突出形成限位块;连接该靠外设置的一雨棚转轴的第二雨棚摇臂上形成有限位槽,所述限位槽与限位块相合。
[0015]
作为优选方案,所述内部运转机构包括z轴搬运模组、设于z轴搬运模组的y轴伸缩模组、设于y轴伸缩模组的摆臂模组以及设于摆臂模组的托盘模组,所述z轴搬运模组、y轴伸缩模组、摆臂模组驱动所述托盘模组自中转箱获取中转物,并经窗口运送至无人机升降平台。
[0016]
作为优选方案,所述摆臂模组设于y轴伸缩模组的y轴滑块上,所述摆臂模组包括摆臂电机、摆臂,以及传动连接摆臂电机、摆臂的第一运转传动带组,所述摆臂电机驱动摆臂摆动;所述第一运转传动带组包括设于摆臂电机主轴的第一摆臂主动轮、与第一摆臂主动轮啮合的第一摆臂传动带、与第一摆臂传动带啮合的第一摆臂从动轮;所述摆臂包括摆臂本体、设于摆臂本体一端的固定轴、设于摆臂本体另一端的手腕轴以及第二运转传动带组;所述第二运转传动带组包括第二摆臂主动轮、与第二摆臂主动轮啮合的第二摆臂传动带、与第二摆臂传动带啮合的第二摆臂从动轮;所述摆臂本体一端固定于第一摆臂从动轮;所述固定轴一端固定于y轴滑块,另一端穿过第一摆臂从动轮后与第二摆臂主动轮固定连接;所述手腕轴一端可转动设于摆臂本体,另一端穿过第二摆臂从动轮,并与托盘模组固定连接,所述第二摆臂从动与手腕轴传动连接。
[0017]
本发明公开的无人机物流柜的有益效果是:第一遮雨棚、第二遮雨棚分别在第一雨棚驱动装置、第二雨棚驱动装置驱动下分离,漏出无人机升降平台,无人机通过无人机升降平台上的图案进行定位后下落至无人机升降平台,中转柜内的中转物在内部运转机构驱动下自窗口运送至无人机升降平台,并由无人机运送至客户。第一遮雨棚、第二遮雨棚在第
一雨棚驱动装置、第二雨棚驱动装置驱动下相合,从而避免雨水对本无人机物流柜的影响,同时极大程度上避免了灰尘等对无人机定位的影响,提高了无人机定位的准确性。
[0018]
当无人机降落至无人机升降平台后,通过设置无人机定位机构进而二次定位。具体为:第一定位驱动组件驱动两第一定位轴相对运动,第二定位驱动组件驱动两第二定位轴相对运动,两第一定位轴、两第二定位轴从两个方向夹持定位无人机,定位精准可靠。
附图说明
[0019]
图1是本发明无人机物流柜的结构示意图。
[0020]
图2是本发明无人机物流柜的结构示意图(无柜体)。
[0021]
图3是本发明无人机物流柜的无人机升降平台和无人机定位机构的结构示意图。
[0022]
图4是本发明无人机物流柜的无人机升降平台和无人机定位机构的俯视图。
[0023]
图5是本发明无人机物流柜的关窗机构结构示意图。
[0024]
图6是本发明无人机物流柜的关窗机构另一视角的结构示意图。
[0025]
图7是本发明无人机物流柜的遮雨棚机构的结构示意图。
[0026]
图8是本发明无人机物流柜的第二雨棚驱动装置的结构示意图。
[0027]
图9是本发明无人机物流柜的第二雨棚驱动装置的俯视图。
[0028]
图10是本发明无人机物流柜的第二雨棚驱动装置的侧视图。
[0029]
图11是本发明无人机物流柜的第二遮雨棚的结构示意图。
[0030]
图12是本发明无人机物流柜的内部运转机构的结构示意图。
[0031]
图13是本发明无人机物流柜的内部运转机构的正视图。
[0032]
图14是本发明无人机物流柜的中转箱的结构示意图。
具体实施方式
[0033]
下面结合具体实施例和说明书附图对本发明做进一步阐述和说明:
[0034]
请参考图1和图2,一种无人机物流柜,包括柜体10、无人机升降平台20、若干中转箱30、内部运转机构40、以及遮雨棚机构50。
[0035]
无人机升降平台20设于所述柜体10顶部,无人机升降平台20上设有便于无人机识别定位的图案,该图案具体为二维码。无人机升降平台20上开设有窗口21。若干中转箱30设于柜体10内,用于存放中转物。内部运转机构40设于柜体10内,内部运转机构40用于自中转箱30获取中转物,并将中转物自窗口21运送至无人机升降平台20。
[0036]
请参考图1和图3,遮雨棚机构50用于遮盖无人机升降平台20,包括第一遮雨棚51、驱动第一遮雨棚51的第一雨棚驱动装置52、第二遮雨棚53、驱动第二遮雨棚53的第二雨棚驱动装置54。第一遮雨棚51与第二遮雨棚53左右相对设置。第一遮雨棚51、第二遮雨棚53分别在第一雨棚驱动装置52、第二雨棚驱动装置54驱动下相合以遮盖无人机升降平台20。
[0037]
请参考图1、图3和图4,该无人机物流柜还包括无人机定位机构60。无人机定位机构60设于无人机升降平台20,用于对无人机进行二次定位。无人机定位机构60包括第一方向设置的两第一定位轴61、驱动两第一定位轴61相对或相背运动的第一定位驱动组件62、第二方向设置的两第二定位轴63、驱动两第二定位轴63相对或相背运动的第二定位驱动组件64。其中,第一定位轴61与第二定位轴63垂直。
[0038]
第一定位驱动组件62包括第一定位电机621、传动连接第一定位电机621的第一传动轴622、两分设在第一传动轴622两端的第一定位同步带组件623、第一导轨以及第一滑块625。第一滑块625分两组,每组第一滑块625分设在第一定位轴61的两端,其中一组第一滑块625连接于第一定位同步带组件623的同步带的上层带,另一组第一滑块625连接于第一定位同步带组件623的同步带的下层带。
[0039]
第二定位驱动组件64包括第二定位电机641、传动连接第二定位电机641的第二传动轴642、两分设在第二传动轴642两端的第二定位同步带组件643、第二导轨以及第二滑块645。第二滑块645分两组,每组第二滑块645分设在第二定位轴63的两端,其中一组第二滑块645连接于第二定位同步带组件643的同步带的上层带,另一组第二滑块645连接于第二定位同步带组件643的同步带的下层带。
[0040]
当该第一定位同步带组件623的同步带运动时,位于其上层带、下层带的两组第一滑块625相对或者相背运动,两第一定位轴61的相对或相背运动。与此同理,当该第二定位同步带组件643的同步带运动时,位于其上层带、下层带的两组第二滑块645相对或者相背运动,两第二定位轴63的相对或相背运动。此时无人机被第一定位轴61、第二定位轴63从两个方向夹持,从而实现对无人机的二次夹持定位。
[0041]
第一定位电机621、第二定位电机641选用双出轴步进电机,第一传动轴622分设于第一定位电机621的两端,第二传动轴642分设于第二定位电机641的两端。
[0042]
请参考图5和图6,该无人机物流柜还包括用于关闭窗口21的关窗机构70。关窗机构70包括固定于柜体10顶板底面的关窗电机71、由关窗电机71驱动的关窗摆臂72,以及设于关窗摆臂72的门体73。关窗电机71驱动关窗摆臂72摆动,从而使门体73翻转至窗口21位置以关闭窗口21。
[0043]
关窗电机71选用无刷直流减速电机。关窗电机71通过空心光轴与关窗摆臂72连接,门体73设于关窗摆臂72底面,当关窗摆臂72翻转180
°
后,门体73跟随翻转并关闭窗口21,此时关窗摆臂72位于门体73下方。为了避免关窗动作中门体73与窗口21的干涉,在门体73与窗口21上开设倒角。
[0044]
请参考图7-图10,第一雨棚驱动装置52、第二雨棚驱动装置54均包括雨棚驱动组件521、两平行设置的雨棚转轴522、设于一雨棚转轴522的第一雨棚摇臂523、设于另一雨棚转轴522的第二雨棚摇臂524,雨棚驱动组件521用于驱动两雨棚转轴522同步转动。其中,第一遮雨棚51可转动的连接于第一雨棚驱动装置52的第一雨棚摇臂523、第二雨棚摇臂524,第二遮雨棚53可转动的连接于第二雨棚驱动装置54的第一雨棚摇臂523、第二雨棚摇臂524。
[0045]
雨棚驱动组件521包括雨棚电机5211、传动连接雨棚电机5211的涡轮蜗杆减速机5212、传动连接涡轮蜗杆减速机5212的输出轴5213,输出轴5213上设有若干第一同步轮5214,雨棚转轴522上设有若干第二同步轮5221,第一同步轮5214、第二同步轮5221通过雨棚同步带连接。其中,涡轮蜗杆减速机5212设于减速基座,减速机座固定于柜体10顶板底面。
[0046]
本实施例中,输出轴5213两端分别设有两第一同步轮5214,即一雨棚驱动组件521一共包括四个第一同步轮5214。其中,分别设于输出轴5213两端两个第一同步轮5214通过雨棚同步带连接设于一雨棚转轴522上的两个第二同步轮5221,分别设于输出轴5213两端
的另两个第一同步轮5214通过雨棚同步带连接设于另一雨棚转轴522上的两个第二同步轮5221。
[0047]
雨棚转轴522包括若干轴段、可拆卸的连接相邻轴段的联轴轮5222。联轴轮5222由两相合的半圆体围成。从而方便安拆。本实施例中,每一雨棚转轴522包括三轴段,第二同步轮5221均设于中间的轴段,两端的轴段和中间的轴段均通过安装座固定于柜体10顶板底面。
[0048]
两雨棚转轴522中,靠外设置的一雨棚转轴522上设有限位轴承座5223,限位轴承座5223上突出形成限位块5224。连接该靠外设置的一雨棚转轴522的第二雨棚摇臂524上形成有限位槽5241,限位槽5241与限位块5224相合。
[0049]
在打开第一遮雨棚51、第二遮雨棚53时,第二雨棚摇臂524朝向一方向摆动,当限位槽5241摆动至与限位块5224相合时,打开角度达到最大。此时第一遮雨棚51、第二遮雨棚53位于无人机升降平台20的相对两侧。
[0050]
第一雨棚驱动装置52、第二雨棚驱动装置54均还包括两支撑轴525,其中一支撑轴525可转动连接第一雨棚摇臂523的远离雨棚转轴522一端,另一支撑轴525可转动连接第二雨棚摇臂524的远离雨棚转轴522一端;支撑轴525优选为空心光轴。其中,第一雨棚驱动装置52的两支撑轴525平行设于第一遮雨棚51,第二雨棚驱动装置54的两支撑轴525平行设于第二遮雨棚53。
[0051]
其中,两雨棚转轴522、第一雨棚摇臂523、第二雨棚摇臂524、两支撑轴525组成双摇杆机构。
[0052]
第一遮雨棚51、第一雨棚驱动装置52的动作过程:需要打开遮雨棚机构50时,雨棚电机5211通过涡轮蜗杆减速机5212驱动输出轴5213转动,输出轴5213的转动通过第一同步轮5214、雨棚同步带、第二同步轮5221传递至雨棚转轴522,从而使得两雨棚转轴522同时、同速、同向转动。第一雨棚摇臂523、第二雨棚摇臂524同时、同速、同向摆动,使第一遮雨棚51打开。第二遮雨棚53、第二雨棚驱动装置54的动作过程与之相同,在此不再赘述。
[0053]
请参考图11,第一遮雨棚51、第二遮雨棚53均包括顶棚531和侧棚532,其中侧棚532一侧开口,第一遮雨棚51的开口与第二遮雨棚53的开口相对。
[0054]
遮雨棚机构50还包括防雨槽,防水槽设于第一遮雨棚51开口处或第二遮雨棚53开口处,当第一遮雨棚51、第二遮雨棚53相合时,防水槽位于第一遮雨棚51、第二遮雨棚53的合缝下方。自合缝下渗的雨水落入防水槽内,防水槽引导雨水流出。
[0055]
请参考图12、图13,内部运转机构40包括z轴搬运模组41、设于z轴搬运模组41的y轴伸缩模组42、设于y轴伸缩模组42的摆臂模组43以及设于摆臂模组43的托盘模组44。z轴搬运模组41、y轴伸缩模组42、摆臂模组43驱动托盘模组44自中转箱30获取中转物,并经窗口21运送至无人机升降平台20。
[0056]
摆臂模组43设于y轴伸缩模组42的y轴滑块421上。摆臂模组43包括摆臂电机431、摆臂432,以及传动连接摆臂电机431、摆臂432的第一运转传动带组433,摆臂电机431驱动摆臂432摆动。
[0057]
第一运转传动带组433包括设于摆臂电机431主轴的第一摆臂主动轮4331、与第一摆臂主动轮4331啮合的第一摆臂传动带4332、与第一摆臂传动带4332啮合的第一摆臂从动轮4333。
[0058]
摆臂432包括摆臂本体4321、设于摆臂本体4321一端的固定轴4322、设于摆臂本体4321另一端的手腕轴4323以及第二运转传动带组4324。第二运转传动带组4324包括第二摆臂主动轮、与第二摆臂主动轮啮合的第二摆臂传动带、与第二摆臂传动带啮合的第二摆臂从动轮。摆臂本体4321一端固定于第一摆臂从动轮4333。固定轴4322一端固定于y轴滑块421,另一端穿过第一摆臂从动轮4333后与第二摆臂主动轮固定连接。手腕轴4323一端可转动设于摆臂本体4321,另一端穿过第二摆臂从动轮,并与托盘模组44固定连接,第二摆臂从动与手腕轴4323传动连接。
[0059]
第一摆臂主动轮4331转动,第一摆臂传动带4332、第一摆臂从动轮4333跟随转动,使得设于第一摆臂从动轮4333的摆臂432开始摆动,摆臂432摆动时以固定轴4322的轴心线为圆心摆动。摆动的摆臂本体4321使第二摆臂传动带环绕第二摆臂主动轮转动,进而使得第二摆臂从动轮反向转动,反向转动的第二摆臂从动轮使得手腕轴4323反向转动,从而保证设于手腕轴4323的托盘模组44始终保持水平。
[0060]
z轴搬运模组41包括z轴升降滑块411,y轴伸缩模组42设于z轴升降滑块411上。y轴伸缩模组42包括y轴丝杠步进电机、y轴滑块421以及导轴,y轴丝杠步进电机的丝杠伸缩,推动y轴滑块421沿y轴方向移动,导轴用于引导y轴滑块421的移动。摆臂电机431、第一运转传动带组433安装于y轴滑块421。z轴升降滑块411上设有直线轴承,导轴穿设于直线轴承。
[0061]
托盘模组44包括梳齿状的第一托盘441以及连接第一托盘441与手腕轴4323的托盘支柱442,第一托盘441上设有电容接近传感器。通过该电容接近传感器获取第一托盘441上的中转物的位置信息。
[0062]
请参考图14,中转箱30包括箱体31、可移出箱体31的第二托盘32,箱体31上设有前门和后门311,打开前门可方便将中转物放入箱体31内,打开后门方便内部运转机构40自箱体31获取中转物,后门311上设有驱动后门311打开的开门驱动件312。
[0063]
第二托盘32也呈梳齿状。实施过程:开门驱动件312驱动后门311打开,第二托盘32移出箱体31。托盘模组44的第一托盘441移动至第二托盘32下方,使第一托盘441的梳齿结构与第二托盘32的梳齿结构上下错位。第一托盘441上升以自第二托盘32获取中转物。
[0064]
本发明公开的无人机物流柜的有益效果是:第一遮雨棚51、第二遮雨棚53分别在第一雨棚驱动装置52、第二雨棚驱动装置54驱动下分离,漏出无人机升降平台20,无人机通过无人机升降平台20上的图案进行定位后下落至无人机升降平台20,第一定位驱动组件62驱动两第一定位轴61相对运动,第二定位驱动组件64驱动两第二定位轴63相对运动,两第一定位轴61、两第二定位轴63从两个方向夹持定位无人机,定位精准可靠。中转柜内的中转物在内部运转机构40驱动下自窗口21运送至无人机升降平台20,并由无人机运送至客户。第一遮雨棚51、第二遮雨棚53在第一雨棚驱动装置52、第二雨棚驱动装置54驱动下相合,从而避免雨水对本无人机物流柜的影响,同时极大程度上避免了灰尘等对无人机定位的影响,提高了无人机定位的准确性。
[0065]
最后应当说明的是,以上实施例仅用以说明本发明的技术方案,而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细地说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips