
 商标分类
商标分类  商标转让
商标转让 
一种基于Leader-Follower的无人机编队农药喷洒系统及其控制方法与流程
 2021-02-13 16:02:53|
2021-02-13 16:02:53| 260|
260| 起点商标网
起点商标网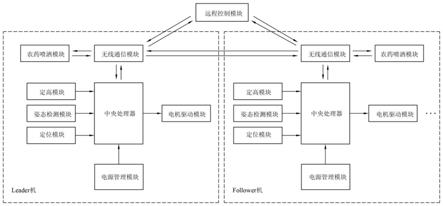
一种基于leader-follower的无人机编队农药喷洒系统及其控制方法
技术领域
[0001]
本发明涉及农药喷洒无人机技术领域,尤其涉及一种基于leader-follower的无人机编队农药喷洒系统及其控制方法。
背景技术:
[0002]
随着科技的发展,无人机技术日趋成熟,已被广泛应用于农业各领域,其中,植保农药喷洒方面的应用较为普遍。但是,无人机单机喷洒农药的工作效率较低,尤其是在病虫害防治时期,需要大量的人手控制多个无人机才能在有效的时间内完成农药喷洒任务,使得农药喷洒工作的人力成本剧增。换句话说,尽管无人机技术进步了,但实际上,通过无人机进行植保农药喷洒仍然需要大量的操作人员。申请号为201822175165.9的实用新型公开了一种无人机农药喷洒系统,属于无人机技术领域,其特征在于设计一种无人机农药喷洒结构,通过减少农药的浪费,从而提高农药喷洒效率,但并没有从根本上解决人力成本的问题。
技术实现要素:
[0003]
本发明的目的之一在于针对已有的技术现状,提供一种基于leader-follower的无人机编队农药喷洒系统,通过无人机编队喷洒农药使得单位时间内农药喷洒面积更大,提高了农药喷洒效率。
[0004]
本发明的目的之二在于针对已有的技术现状,提供一种基于leader-follower的无人机编队农药喷洒系统的控制方法,只需要改变follower机与leader机的期望跟随距离和期望跟随角度就可以任意变换编队队形,也可以任意改变无人机编队的规模,以更经济的方式去进行农药喷洒。
[0005]
为达到上述目的,本发明采用如下技术方案:
[0006]
一种基于leader-follower的无人机编队农药喷洒系统,包括远程控制模块和无人机编队,所述无人机编队包括若干无人机,其一无人机作为无人机编队的leader机,其余无人机作为无人机编队的follower机;
[0007]
每一无人机上均搭载设有中央处理器、定高模块、姿态检测模块、定位模块、电源管理模块、无线通信模块、电机驱动模块、农药喷洒模块;
[0008]
所述定高模块与所述中央处理器连接,定高模块将采集的高度信号输入至中央处理器中,定高模块包括超声波模块和气压计,定高模块采用超声波测距与气压计测距两种方式互补来获取高度信息;
[0009]
所述姿态检测模块与所述中央处理器连接,姿态检测模块用于将采集的无人机姿态信号输入至所述中央处理器中;
[0010]
所述定位模块与所述中央处理器连接,定位模块包括gps和uwb,定位模块用于将接收到的gps信号和采集的uwb非正弦窄波脉冲信号进行数据融合后输入至所述中央处理
器中,经所述中央处理器计算出无人机的实时位置信息;
[0011]
所述电源管理模块与所述中央处理器连接,电源管理模块用于向无人机的供电;
[0012]
每一无人机中的无线通讯模块均与中央处理器和远程控制模块无线连接,用于将接收的控制信号输入至所述中央处理器中,leader机的无线通信模块与每一follower机的无线通信模块均无线连接,用于将leader机输出的控制信号输入至每一follower机;
[0013]
所述电机驱动模块与所述中央处理器连接,电机驱动模块用于接收所述中央处理器的控制信息,从而通过实时调整电机转速实现无人机的协同控制;
[0014]
所述农药喷洒模块置于无人机的起落架上,农药喷洒模块与所述无线通信模块无线连接,接收所述远程控制器的控制信息后,喷洒定量的农药。
[0015]
进一步的,所述中央处理器为单片机stm32f103c8t6,其最小系统包括swd下载电路、复位电路、滤波电路、晶振电路以及电源指示灯电路。
[0016]
进一步的,所述定高模块中,气压计为ms5611,气压计设置在无人机的飞控板上,超声波模块通过物理接线方式连接在飞控板上。
[0017]
进一步的,所述姿态检测模块为mpu9250。
[0018]
进一步的,所述定位模块中,gps采用m8t芯片,uwb采用dw1000单片无线收发芯片,uwb采用三基站多标签定位方法。
[0019]
进一步的,所述无线通信模块为nrf24l01p芯片。
[0020]
进一步的,所述农药喷洒模块包括喷洒控制器、药箱、液泵、连接管、雾化喷头,药箱、液泵、连接管、雾化喷头依次连接,所述喷洒控制器通过无线通信模块接收远程控制模块的控制信息,从而决定农药喷洒模块是否喷洒农药。
[0021]
一种基于leader-follower的无人机编队农药喷洒系统的控制方法,包括如下过程:
[0022]
远程控制模块中所设定的follower机与leader机的期望距离、期望角度以及实时获取的leader机的位置信息和偏航角信息,将作为leader机的中央处理器的输入,经过编队运动学方程计算出follower机的目标位置和目标偏航角;
[0023]
编队运动学方程如下:编队运动学方程如下:z
f
=z
l-,其中x
f
、y
f
为无人机编队中的follower机在x0y平面内的期望位置信息,x
l
、y
l
为leader机的位置信息,l
x
、l
y
分别为follower机与leader机在x、y方向上的期望距离,z
f
为follower机的期望高度信息,z
l
为leader机的实时高度信息,z为follower机的实时高度信息,为follower机的期望跟随角度,为leader机的实时偏航角,为follower机的实时偏航角,通过远程控制模块改变编队运动学方程中的期望跟随距离和期望跟随角度即可任意变换无人机编队的队形。
[0024]
进一步的,当leader机接收到远程控制模块的控制信息时,将检查信息是否完整,若完整则解析得出期望位置信息参与计算,若不完整则继续等待接收,当leader机未接收到远程控制模块的控制信息时,则根据自身设定程序工作;当follower机接收到leader机的控制信息时,将检查信息是否完整,若完整则解析得出期望位置信息参与计算,若不完整则继续等待接收,当follower机未接收到leader机的控制信息时,则根据自身设定程序工作。
[0025]
本发明的有益效果为:
[0026]
本发明通过无人机编队喷洒农药使得单位时间内农药喷洒面积更大,提高了农药喷洒效率,并且只需要改变follower机与leader机的期望跟随距离和期望跟随角度就可以任意变换编队队形,也可以任意改变无人机编队的规模,以更经济的方式去进行农药喷洒;无人机采用基于gps和uwb的组合定位方式,经过数据融合处理,可以极大地提高无人机的定位精度,从而有效减少农药重复喷洒、漏喷等现象。
附图说明
[0027]
附图1为本发明无人机编队农药喷洒系统的总体框架图;
[0028]
附图2为本发明无人机编队农药喷洒系统处理控制信息的流程图。
具体实施方式
[0029]
下面结合附图对本发明作进一步说明。
[0030]
请参阅图1所示,一种基于leader-follower的无人机编队农药喷洒系统,包括远程控制模块和无人机编队,控制模块即遥控器,控制模块人工操纵,所述无人机编队包括若干无人机,一般无人机采用四旋翼无人机,其一无人机作为无人机编队的leader机,其余无人机作为无人机编队的follower机。每一无人机上均搭载设有中央处理器、定高模块、姿态检测模块、定位模块、电源管理模块、无线通信模块、电机驱动模块、农药喷洒模块。
[0031]
实际选用时,所述中央处理器为单片机stm32f103c8t6,其最小系统包括swd下载电路、复位电路、滤波电路、晶振电路以及电源指示灯电路。
[0032]
所述定高模块与所述中央处理器连接,定高模块将采集的高度信号输入至中央处理器中,定高模块包括超声波模块和气压计,定高模块采用超声波测距与气压计测距两种方式互补来获取高度信息。实际选用时,所述定高模块中,气压计为ms5611,气压计设置在无人机的飞控板上,超声波模块通过物理接线方式连接在飞控板上。
[0033]
所述姿态检测模块与所述中央处理器连接,姿态检测模块用于将采集的无人机姿态信号输入至所述中央处理器中。实际选用时,所述姿态检测模块为mpu9250。
[0034]
所述定位模块与所述中央处理器连接,定位模块包括gps和uwb,uwb即超宽带,定位模块用于将接收到的gps信号和采集的uwb非正弦窄波脉冲信号进行数据融合后输入至所述中央处理器中,经所述中央处理器计算出无人机的实时位置信息。实际选用时,所述定位模块中,gps采用m8t芯片,uwb采用dw1000单片无线收发芯片,uwb采用三基站多标签定位方法。定位模块采用基于gps和uwb的组合定位方式,经过数据融合处理,可以极大地提高无人机的定位精度,从而有效减少农药重复喷洒、漏喷等现象。
[0035]
所述电源管理模块与所述中央处理器连接,电源管理模块用于向无人机的供电。
[0036]
每一无人机中的无线通讯模块均与中央处理器和远程控制模块无线连接,用于将接收的控制信号输入至所述中央处理器中,leader机的无线通信模块与每一follower机的无线通信模块均无线连接,用于将leader机输出的控制信号输入至每一follower机。也就是说,对于喷洒指令,leader机和follower机均只接收远程控制模块的控制信息;对于飞行指令,leader机只接收远程控制模块的控制信息,follower机只接收leader机的控制信息。实际选用时,所述无线通信模块为nrf24l01p芯片。
[0037]
所述电机驱动模块与所述中央处理器连接,电机驱动模块用于接收所述中央处理器的控制信息,从而通过实时调整电机转速实现无人机的协同控制。
[0038]
所述农药喷洒模块置于无人机的起落架上,农药喷洒模块与所述无线通信模块无线连接,接收所述远程控制器的控制信息后,喷洒定量的农药。具体的,所述农药喷洒模块包括喷洒控制器、药箱、液泵、连接管、雾化喷头,药箱、液泵、连接管、雾化喷头依次连接,形成农药喷洒结构,所述喷洒控制器通过无线通信模块接收远程控制模块的控制信息,从而决定农药喷洒模块是否喷洒农药。
[0039]
一种基于leader-follower的无人机编队农药喷洒系统的控制方法,包括如下过程:
[0040]
远程控制模块中所设定的follower机与leader机的期望距离、期望角度以及实时获取的leader机的位置信息和偏航角信息,将作为leader机的中央处理器的输入,经过编队运动学方程计算出follower机的目标位置和目标偏航角。
[0041]
无人机编队农药喷洒系统采用如下编队运动学方程:
[0042][0043][0044]
z
f
=z
l-z;
[0045][0046]
其中,x
f
、y
f
为无人机编队中的follower机在x0y平面内的期望位置信息,x
l
、y
l
为leader机的位置信息,l
x
、l
y
分别为follower机与leader机在x、y方向上的期望距离,z
f
为follower机的期望高度信息,z
l
为leader机的实时高度信息,z为follower机的实时高度信息,为follower机的期望跟随角度,为leader机的实时偏航角,为follower机的实时偏航角,通过远程控制模块改变编队运动学方程中的期望跟随距离和期望跟随角度即可任意变换无人机编队的队形。
[0047]
请参阅图2所示,无人机编队农药喷洒系统的工作过程如下:
[0048]
当leader机接收到远程控制模块的控制信息时,将检查信息是否完整,若完整则解析得出期望位置信息参与计算,若不完整则继续等待接收,当leader机未接收到远程控制模块的控制信息时,则根据自身设定程序工作;
[0049]
当follower机接收到leader机的控制信息时,将检查信息是否完整,若完整则解析得出期望位置信息参与计算,若不完整则继续等待接收,当follower机未接收到leader机的控制信息时,则根据自身设定程序工作。
[0050]
本发明通过无人机编队喷洒农药使得单位时间内农药喷洒面积更大,提高了农药喷洒效率,并且只需要改变follower机与leader机的期望跟随距离和期望跟随角度就可以任意变换编队队形,也可以任意改变无人机编队的规模,以更经济的方式去进行农药喷洒,比如,在农药喷洒不均匀、单个无人机所携带农药提前喷洒完毕等情形下,以一个更合理的队形完成剩余的农药喷洒作业。
[0051]
本发明具有如下优点:
[0052]
1、本发明通过无人机编队进行农药喷洒作业,极大地提高了农药喷洒效率;
[0053]
2、无人机编队的结构简单,易于控制,极大的降低了人工成本;
[0054]
3、无人机编队方式可以使其任意改变队形,适应于不同的农药喷洒环境,提高了有效喷洒面积;
[0055]
4、本发明可以控制农药的喷洒时间,节省了农药储量。
[0056]
当然,以上仅为本发明较佳实施方式,并非以此限定本发明的使用范围,故,凡是在本发明原理上做等效改变均应包含在本发明的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips