
 商标分类
商标分类  商标转让
商标转让 
一种新型无人机起落架收放装置的制作方法
 2021-02-13 16:02:33|
2021-02-13 16:02:33| 200|
200| 起点商标网
起点商标网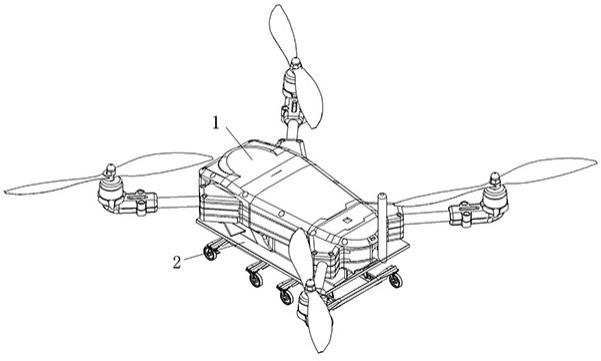
[0001]
本实用新型涉及无人机技术领域,特别涉及一种新型无人机起落架收放装置。
背景技术:
[0002]
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备,地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行,回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收,可反复使用多次,广泛用于空中侦察、监视、通信、反潜、电子干扰等;
[0003]
现有技术领域内,起落架是无人机的主要组成部分,其主要起到无人机起降过程中对无人机的支撑作用,但现有的无人机起落架结构较为简单,是直接与无人机本体固定连接,无法进行折叠升降,无人机低空飞行过程中,起落架容易挂到障碍物,进而导致无人机坠毁,且市面上部分起落架采用两侧独立折叠,容易导致起落架无法同步升降,进而影响无人机正常起落。
技术实现要素:
[0004]
本实用新型的目的是提供一种新型无人机起落架收放装置,从而解决上述问题。
[0005]
本实用新型的上述技术目的是通过以下技术方案得以实现的:
[0006]
1.一种新型无人机起落架收放装置,固定安装于无人机本体底部,其特征在于,包括顶板、基座架、升降单元和底架,所述顶板固定设置于无人机本体底部,所述基座架固定安装在顶板的下表面,所述升降单元沿上下方向固定安装在基座架的内侧,所述底架设置于升降单元下方;
[0007]
所述升降单元包括:第一导轨、第一滑块、第一圆柱杆、第一连杆、第二导轨、第二连杆、第二滑块和第二圆柱杆,所述第一导轨的数量为四个,所述第一导轨分别设置在所述基座架的内侧四角,所述第一滑块的数量为四个,所述第一滑块分别固定安插在所述第一导轨的内腔内侧,所述第一圆柱杆的数量为两个,所述第一圆柱杆两侧分别固定设置于第一滑块的内侧,所述第一连杆的数量为四个,所述第一圆柱杆的一端分别通过第一轴承转动连接在第一圆柱杆的外壁,所述第二导轨的数量为四个,所述第二导轨的内侧外端通过销轴转动连接第一连杆的另一端,所述第二连杆的数量为四个,所述第二连杆的一端分别与左右两侧第一导轨的内侧外端通过销轴转动连接,所述第二连杆和第一连杆之间交叉设置交叉位置通过销轴转动连接,所述第二滑块的数量为四个,所述第二滑块分别固定安插在第二导轨的内腔内侧,所述第二圆柱杆的数量为两个,所述第二圆柱杆分别固定设置在前后两个第二滑块的内侧,所述第二连杆的另一端分别与左右两侧的第二圆柱杆的外壁前后两侧通过第二轴承转动连接。
[0008]
优选的,所述第一轴承的内环与第一圆柱杆的外壁过盈配合,且第一轴承的外环
与第一连杆的内壁过盈配合。
[0009]
优选的,所述第二轴承的内环与第二圆柱杆的外壁过盈配合,且第二轴承的外环与第二连杆的内壁过盈配合。
[0010]
优选的,所述升降单元还包括步进电机、丝杠螺杆、丝杠螺母和第三连杆,所述步进电机固定设置于基座架的内腔后侧中心位置,所述步进电机与无人机本体电性连接,所述丝杠螺杆通过螺钉连接在步进电机的输出端,所述丝杠螺母的数量为两个,所述丝杠螺母分别螺接在丝杠螺杆的外壁前后两侧,所述第三连杆的数量为四个,所述第三连杆的一端分别通过第三销轴转动连接在前后丝杠螺母的左右两侧,所述连接块的数量为两个,所述连接块分别套接在左右两个第一圆柱杆的外壁中心位置,所述第三连杆的另一端分别与左右两个连接块的内侧通过第四销轴转动连接。
[0011]
优选的,所述第二导轨分别平行设置于第一导轨的下方对应位置处。
[0012]
优选的,所述底架包括连接杆与万向轮,所述连接杆的数量为四个,所述连接杆分别沿前后方向设置在前后两个第二导轨的左右两侧,所述万向轮的数量为四组,所述每组万向轮的数量为两个,所述万向轮分别螺接在连接杆的底端前后两侧。
[0013]
与现有技术相比,本实用新型的有益效果是:该新型无人机起落架收放装置,通过步进电机驱动丝杠螺杆转动,促使丝杠螺母在丝杠螺杆旋转力的作用下分别带动第三连杆的内侧端向外侧移动,进而使丝杠螺杆外端向内侧折叠并拉动对应位置上的连接块向内侧移动,连接块在第一圆柱杆的配合下驱动第一滑块带动对应位置上的第一连杆顶端向内侧移动,第一连杆以与第一圆柱杆轴承转动连接处为顶点自身底端向上转动,进而拉动对应位置上的第二导轨向上移动,通过第二导轨在第二滑块的配合下带动第二圆柱杆向上移动,第二连杆以与第一导轨销轴转动连接处为顶点自身底端向上转动,并在第二圆柱杆的配合下带动第二滑块在第二导轨的内腔向外侧移动,进而在底板第二导轨上升过程中起到限位与支撑作用,通过第二导轨在连接杆的配合下带动对应位置上的万向轮向上移动,促使底架完成折叠,从而可实现无人机在起降过程中,两侧起落架同步远程控制进行折叠升降,使无人机起降更加平稳,并且可避免无人机低空飞行过程中,起落架挂到障碍物导致坠毁。
附图说明
[0014]
图1为本实用新型的安装位置示意图;
[0015]
图2为本实用新型的整体结构爆炸图;
[0016]
图3为本实用新型的升降单元与底架结构示意图;
[0017]
图中:无人机本体-1,顶板-2,基座架-3,升降单元-4,第一导轨-41,第一滑块-42,第一圆柱杆-43,第一连杆-44,第二导轨-45,第二连杆-46,第二滑块-47,第二圆柱杆-48,第三连杆-49,连接块-410,步进电机-411,丝杠螺杆-412,丝杠螺母-413,底架-5,连接杆-51,万向轮-52。
具体实施方式
[0018]
下面结合附图对本实用新型的具体实施方式作进一步说明,本实施例不构成对本实用新型的限制。
[0019]
如图1-3所示的一种新型无人机起落架收放装置,固定安装于无人机本体1底部,其特征在于,包括顶板2、基座架3、升降单元4和底架5,所述顶板2固定设置于无人机本体1底部,所述基座架3固定安装在顶板2的下表面,所述升降单元4沿上下方向固定安装在基座架3的内侧。
[0020]
所述升降单元4包括:第一导轨41、第一滑块42、第一圆柱杆43、第一连杆44、第二导轨45、第二连杆46、第二滑块47和第二圆柱杆48,所述第一导轨的数量为四个,所述第一导轨44分别设置在所述基座架3的内侧四角,所述第一滑块42的数量为四个,所述第一滑块42分别固定安插在所述第一导轨41的内腔内侧,所述第一圆柱杆43的数量为两个,所述第一圆柱杆43两侧分别固定设置于第一滑块42的内侧,所述第一连杆44的数量为四个,所述第一连杆44的一端分别通过第一轴承转动连接在第一圆柱杆43的外壁,所述第一轴承的内环与第一圆柱杆43的外壁过盈配合,且第一轴承的外环与第一连杆44的内壁过盈配合,所述第二导轨45的数量为四个,所述第二导轨45分别平行设置于第一导轨41的下方对应位置处,所述第二导轨45的内侧外端通过销轴转动连接第一连杆44的另一端,第一连杆44的顶端向内侧移动过程中,第一连杆44以与第一圆柱杆43第一轴承转动连接处为顶点自身底端向上转动,进而拉动对应位置上的第二导轨45向上移动。
[0021]
所述第二连杆46的数量为四个,所述第二连杆46的一端分别与左右两侧第一导轨41的内侧外端通过销轴转动连接,所述第二连杆46和第一连杆44之间交叉设置交叉位置通过销轴转动连接,所述第二滑块47的数量为四个,所述第二滑块47分别固定安插在第二导轨45的内腔内侧,所述第二圆柱杆48的数量为两个,所述第二圆柱杆48分别固定设置在前后两个第二滑块47的内侧,所述第二连杆46的另一端分别与左右两侧的第二圆柱杆48的外壁前后两侧通过第二轴承转动连接,所述第二轴承的内环与第二圆柱杆48的外壁过盈配合,且第二轴承的外环与第二连杆46的内壁过盈配合,第二导轨45向上移动过程中可在第二滑块47的配合下带动第二圆柱杆48向上移动,促使第二连杆46以与第一导轨41销轴转动连接处为顶点自身底端向上转动,并在第二圆柱杆48的配合下带动第二滑块47在第二导轨45的内腔向外侧移动,进而在底板第二导轨45上升过程中起到限位与支撑作用。
[0022]
所述升降单元4还包括步进电机411、丝杠螺杆412、丝杠螺母413、第三连杆49和连接块410,所述步进电机411固定设置于基座架3的内腔后侧中心位置,步进电机411具体型号根据具体使用要求直接从市场上购买安装并使用,所述步进电机411与无人机本体1电性连接并受到无人机本体1控制,所述丝杠螺杆412通过螺钉连接在步进电机411的输出端,步进电机411驱动丝杠螺杆412转动。所述丝杠螺母413的数量为两个,所述丝杠螺母413分别螺接在丝杠螺杆412的外壁前后两侧,丝杠螺母413可在丝杠螺杆412旋转力的作用下分别向外侧或向内侧移动,所述第三连杆49的数量为四个,所述第三连杆49的一端分别通过销轴转动连接在前后丝杠螺母413的左右两侧,所述连接块410的数量为两个,所述连接块410分别套接在左右两个第一圆柱杆43的外壁中心位置,所述连接块410在第一圆柱杆43的配合下带动自身前后两个第一滑块42向内侧移动,并在对应位置第一导轨41的限位作用下带动对应位置上的第一连杆44顶端向内侧移动;所述第三连杆49的另一端分别与左右两个连接块410的内侧通过销轴转动连接,丝杠螺母413向外侧移动过程中带动第三连杆49的内侧端向外侧移动,进而使第三连杆49以内端销轴转动连接处为顶点与丝杠螺杆412夹角变小的同时,第三连杆49外端向内侧折叠,促使左右两侧的第三连杆49分别拉动对应位置上的
连接块410向内侧移动,。
[0023]
所述底架5包括连接杆51与万向轮52,所述连接杆51的数量为四个,所述连接杆51分别设置在前后两个第二导轨45的左右两侧,所述万向轮52的数量为四组,所述每组万向轮52的数量为两个,所述万向轮52分别螺接在连接杆51的底端前后两侧,万向轮52可适用于需要滑翔助力的无人机。
[0024]
工作原理:在起飞时,工作人员远程控制无人机本体1启动步进电机411,步进电机411驱动丝杠螺杆412逆时针转动,由于丝杠螺杆412和丝杠螺母413相螺接,促使丝杠螺母413在丝杠螺杆412旋转力的作用下分别向外侧移动,由于第三连杆49内外两端分别和丝杠螺母413和连接块410通过销轴转动连接,促使丝杠螺母413向外侧移动过程中带动第三连杆49的内侧端向外侧移动,进而使第三连杆49以内端销轴转动连接处为顶点与丝杠螺杆412夹角变小的同时,第三连杆49外端向内侧折叠,促使左右两侧的第三连杆49分别拉动对应位置上的连接块410向内侧移动,连接块410在第一圆柱杆43的配合下带动自身前后两个第一滑块42向内侧移动,并在对应位置第一导轨41的限位作用下带动对应位置上的第一连杆44顶端向内侧移动,由于第一连杆44的顶端和底端分别与第一圆柱杆43的外壁以及第二导轨45通过第一轴承和销轴转动连接,且对应位置上的第二连杆46和第一连杆44之间通过销轴转动连接,第一连杆44的顶端向内侧移动过程中,第一连杆44以与第一圆柱杆43第一轴承转动连接处为顶点自身底端向上转动,进而拉动对应位置上的第二导轨45向上移动,且第二导轨45向上移动过程中在第二滑块47的配合下带动第二圆柱杆48向上移动,由于第二连杆46的顶端和底端分别与第一导轨41的内侧以及第二圆柱杆48通过销轴和第二轴承转动连,进而在第二导轨45的限位作用下,第二连杆46以与第一导轨,41销轴转动连接处为顶点自身底端向上转动,并在第二圆柱杆48的配合下带动第二滑块47在第二导轨45的内腔向外侧移动,进而在底板第二导轨45上升过程中起到限位与支撑作用,并由于对应位置上的第一连杆44分第二连杆46之间交叉设置且交叉处通过销轴转动连接,促使第一连杆44和第二连杆46之间交叉夹角变小的同时在第二导轨45的作用下带动对应位置上的连接杆51向上移动,并使连接杆51带动对应位置上的万向轮52向上移动,促使底架5完成折叠,从而可实现无人机在起降过程中,两侧起落架收放装置同步远程控制进行折叠升降,使无人机起降更加平稳,并且可避免无人机低空飞行过程中,起落架挂到障碍物导致坠毁。
[0025]
在本实用新型的描述中,需要理解的是,术语“顶端”、“底端”、“一端
”ꢀ
、“前侧”、“后侧”、“另一端”、“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作;同时除非另有明确的规定和限定,术语“安装”、“螺钉连接”、“插接”、“过盈配合”、“设置”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0026]
尽管已经出示和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips