
 商标分类
商标分类  商标转让
商标转让 
一种用于小型多旋翼无人机的磁力辅助供能装置的制作方法
 2021-02-13 16:02:19|
2021-02-13 16:02:19| 325|
325| 起点商标网
起点商标网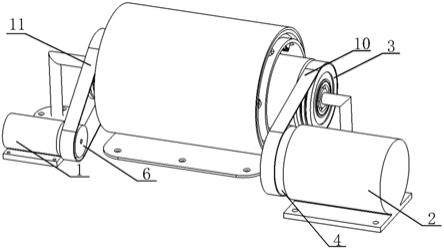
[0001]
本实用新型涉及小型多旋翼无人机设备技术领域,具体是一种用于小型多旋翼无人机的磁力辅助供能装置。
背景技术:
[0002]
小型多旋翼无人机是指空机质量≤15kg,且≥4kg,最大起飞质量≤25kg,且≥7kg的无人机,由电力驱动,具有垂直起降,空中悬停,动力耦合度低,响应速度快等优点。可用于航拍,航空护林和火场侦查等领域。目前在售的小型多旋翼无人机的续航基本在二十几分钟,对于无人机丰富的功能来说这是远远不够的。例如,东北林区交通不便,巡护作业半径为100-300km,目前的小型多旋翼无人机的续航能力根本无法满足作业要求。影响续航的主要因素有飞行重量和电池参数,携带更多的电池,利用风光发电或者采用油电混合动力系统能够增大电能供给,但利用风光发电受环境影响较大,且发电不稳定,携带更多的电池和采用油电混合动力系统能明显增大电能供给,但也会明显增大飞行重量,同时在油电混合动力系统中,发动机工作会产生很大的振动,而无人机的稳定工作依赖于各种精密传感器,其中对姿态控制极为重要的惯性测量单元对振动很敏感,因此,以上提高无人机续航能力的方法均存在明显的不足。在多数工作中,小型多旋翼无人机并不需要长达数小时的续航能力,而且上述增加续航的方法均有待克服的缺陷,因此,只需要在其现有续航能力的基础上进行提升即可。
[0003]
综上所述,小型多旋翼无人机对续航方式有以下要求:1.能有效提升无人机的续航能力;2.不能明显增大飞行重量;3.工作中产生的振动不能影响无人机的稳定运行;4.受环境条件影响小;5.发电稳定;6.节约能源。而设计合理的磁力辅助供能装置,即通过磁力驱动发电机发电,进而为无人机供能,能够满足以上要求。
[0004]
由于无人机续航能力不足,以及在多数工作中,小型多旋翼无人机并不需要长达数小时的续航能力,而且通过携带更多的电池,利用风光发电或者采用油电混合动力系统来提高续航能力的方法均有待克服的缺陷。
[0005]
文献cn 206542319 u提出了一种磁助力发电装置,其将两个磁铁同轴线配合,将外圈的磁铁固定,利用磁铁异极相吸的原理,使得内圈磁铁转动,从而带动发电机轴旋转。该设计存在以下不足:
[0006]
1.定子内侧布满磁铁,而转子外表面的磁铁采用分布式点状布置,二者仅通过隔磁片的通孔相互吸引,大大浪费了外圈磁铁的磁力,使得内外圈磁铁产生的吸力较小,难以驱动转矩较大的发电机;
[0007]
2.只通过正负极的吸力产生转矩驱动电机,由于单位体积磁铁的吸力有限,若只靠正负极的吸力,则需要很大的磁铁,大大增加了无人机的自重,减弱了无人机的负重能力;
[0008]
3.结构设计不紧凑,空间利用率不高;
[0009]
4.仅设计了机械装置,没有提出相应的控制方式。
技术实现要素:
[0010]
本实用新型的目的在于提供一种用于小型多旋翼无人机的磁力辅助供能装置,能够充分利用磁铁的磁力,产生较大的转矩并且装置重量要小;结构紧凑,提高空间利用率。
[0011]
为实现上述目的,本实用新型提供如下技术方案:一种用于小型多旋翼无人机的磁力辅助供能装置,其特征是,所述供能装置包括转矩电机、起发一体电机、中心轴、隔磁筒、驱动筒、壳体;
[0012]
中心轴上设置内圈磁铁;
[0013]
隔磁筒转动设置在中心轴上,隔磁筒为圆环结构,包括端面盘、端面盘上设置的内隔磁筒、外隔磁筒,内隔磁筒位于内圈磁铁外;内隔磁筒、外隔磁筒上设有调磁块;
[0014]
驱动筒转动设置在中心轴上,驱动筒位于内隔磁筒、外隔磁筒之间;驱动筒上设置条形磁铁;
[0015]
壳体位于外隔磁筒外,壳体内侧设置外圈磁铁;
[0016]
壳体、隔磁筒、驱动筒、中心轴同轴线设置;
[0017]
起发一体电机通过第一传动机构连接驱动筒;
[0018]
转矩电机通过第二传动机构驱动连接隔磁筒。
[0019]
优选的,所述驱动筒周向分布有轴向槽,轴向槽内设置条形磁铁,条形磁铁径向设置,条形磁铁两个磁极端部为锯齿形。
[0020]
优选的,所述内隔磁筒、外隔磁筒上均周向分布有轴向槽,轴向槽内设置调磁块,调磁块为t形结构,包括弧形部和径向部;
[0021]
弧形部与对应的内隔磁筒或外隔磁筒相贴合,所有调磁块的弧形部覆盖内隔磁筒或外隔磁筒的圆周面;
[0022]
径向部设置在轴向槽中,径向部与隔磁筒轴向槽过盈配合,径向部端部为锯齿形,弧形部与内圈磁铁、弧形部与外圈磁铁之间留有气隙;
[0023]
内圈磁铁、外圈磁铁和条形磁铁为永磁体,调磁块为软磁铁氧体。
[0024]
优选的,所述中心轴为台阶轴,台阶轴中部设置内圈磁铁。
[0025]
优选的,所述驱动筒端部设有驱动筒凸缘,驱动筒凸缘通过通过轴承一转动设置在中心轴端部;
[0026]
所述第一传动机构包括皮带轮一、皮带轮二、皮带一,皮带轮一设置在驱动筒凸缘上,皮带轮二设置在起发一体电机的电机轴上,皮带一套设在皮带轮一、皮带轮二上;皮带轮一和皮带轮二的外圈直径相同。
[0027]
优选的,所述端面盘通过轴承座、轴承三转动设置在中心轴端部;
[0028]
所述第二传动机构包括皮带轮三、皮带轮四、皮带二,皮带轮三设置在隔磁筒端面盘的轴承座上,皮带轮四设置在转矩电机的电机轴上,皮带二套设在皮带轮三、皮带轮四上;
[0029]
皮带轮三的外圈直径是皮带轮四的外圈直径的三倍。
[0030]
优选的,所述中心轴、转矩电机、起发一体电机均固连在无人机载重平台上,中心轴、转矩电机电机轴、起发一体电机电机轴平行设置。
[0031]
优选的,所述外隔磁筒、内隔磁筒、驱动筒上的轴向槽数量相同,外隔磁筒、内隔磁筒、驱动筒上相邻两个轴向槽中心线之前的夹角为20
°
;
[0032]
沿顺时针方向,外隔磁筒的轴向槽位于对应的内隔磁筒的轴向槽前面;
[0033]
驱动筒的轴向槽位于对应的外隔磁筒轴向槽与内隔磁筒轴向槽之间。
[0034]
优选的,所述内圈磁铁与条形磁铁对应端磁极相同,产生斥力;外圈磁铁与条形磁铁对应端磁极相反,产生吸力。
[0035]
优选的,所述磁力辅助供能装置还包括控制系统,控制系统包括电源,控制器,霍尔元件,放大电路,滤波电路,接口电路,数模转换电路,驱动电路一,驱动电路二,转速传感器一,转速传感器二,串口通信电路和上位机;
[0036]
霍尔元件安装在条形磁铁的两个磁极上,传感器一用于检测小转矩电机的转速,传感器二用于检测起发一体电机的转速;
[0037]
霍尔元件经由放大电路、滤波电路、接口电路、数模转换电路与控制器进行通信;
[0038]
控制器经由驱动电路一与小转矩电机相连接;
[0039]
控制器经由驱动电路二与起发一体电机相连接;
[0040]
控制器通过串口通信电路与上位机进行通信;
[0041]
电源用于向控制器、霍尔元件、驱动电路一、驱动电路二供电;
[0042]
放大电路分别与转速传感器一、转速传感器二相连接。
[0043]
与现有技术相比,本实用新型的有益效果为:
[0044]
1.本实用新型减小了内外圈磁铁的磁泄露,增大了驱动筒传递给起发一体电机的转矩:将条形磁铁沿周向布置在驱动筒的直槽中,使内外圈磁铁能够将更多磁力作用到驱动筒上,在内外隔磁筒的直槽中安装t形调磁块,t形调磁块能够集中内外圈磁铁的磁力,并作用到条形磁铁的磁极,减少了内外圈磁铁的磁泄露,增大了输出转矩。
[0045]
2.本实用新型充分利用了磁铁间的吸力和斥力,增大转矩的同时不增加自重:将条形磁铁的两个磁极和t形调磁块的径向部设计为锯齿形,锯齿形的设计能够增大磁铁间沿驱动筒周向方向的作用力,条形磁铁的两个磁极分别受到内外圈磁铁作用的吸力和斥力,给驱动筒提供了更大的转矩,从而能驱动更大转矩的发电机而不需要增加磁铁。
[0046]
3.本实用新型装置的结构紧凑,空间利用率高。
[0047]
4.本实用新型提出了磁力辅助供能装置的控制方式。
附图说明
[0048]
图1为本实用新型用于小型多旋翼无人机的磁力辅助供能装置的轴测图。
[0049]
图2为本实用新型用于小型多旋翼无人机的磁力辅助供能装置的轴测图(去掉外隔磁筒,驱动筒,皮带轮一和皮带一)。
[0050]
图3为本实用新型用于小型多旋翼无人机的磁力辅助供能装置的左视图。
[0051]
图4为本实用新型用于小型多旋翼无人机的磁力辅助供能装置的半剖视图。
[0052]
图5为本实用新型隔磁筒和轴承座装配后的轴测图。
[0053]
图6为本实用新型中心轴的轴测图。
[0054]
图7为本实用新型t形调磁块的轴测图。
[0055]
图8为本实用新型t形调磁块和条形磁铁的相对位置示意图。
[0056]
图9为本实用新型的控制系统框图。
[0057]
图中标号:
[0058]
1、小转矩电机,2、起发一体电机,3、皮带轮一,4、皮带轮二,5、皮带轮三,6、皮带轮四,7、轴承一,8、轴承二,9、轴承三,10、皮带一,11、皮带二,12、中心轴,13、内圈磁铁,14、隔磁筒,15、驱动筒,16、条形磁铁,17、外圈磁铁,18、壳体,19、t形调磁块,20、轴承座,21、中心轴的粗轴段,22、中心轴的细轴段,23、直槽,24、内隔磁筒,25、外隔磁筒,26、端面盘,27、t形调磁块的小端径向部,28、t形调磁块的大端弧形部。
具体实施方式
[0059]
下面结合附图和实施例对本实用新型进一步说明,该实施例仅用于解释本实用新型,并不对本实用新型的保护范围构成限定。
[0060]
如图1-9所示,一种用于小型多旋翼无人机的磁力辅助供能装置,包括机械部分和控制系统。
[0061]
机械部分包括小转矩电机1,起发一体电机2,皮带轮一3,皮带轮二4,皮带轮三5,皮带轮四6,轴承一7,轴承二8,轴承三9,皮带一10,皮带二11,中心轴12,内圈磁铁13,隔磁筒14,驱动筒15,条形磁铁16,外圈磁铁17,壳体18,t形调磁块19和轴承座20。
[0062]
中心轴12为台阶轴,中间轴段比其余轴段粗,两侧的细轴段22均呈直角形状,通过细轴段22端部的凸台与无人机载物平台用螺栓固连。中心轴12为整个装置起支撑的作用,内圈磁铁13与中心轴12的粗轴段21同轴线过盈配合。
[0063]
驱动筒15与中心轴12同轴线配合,通过其一侧的凸缘与轴承一7外圈过盈配合,驱动筒15沿其周向方向开有六个直槽23,直槽23用于安装条形磁铁16,轴承一7内圈与中心轴的细轴段22过盈配合。
[0064]
皮带轮一3的内孔与驱动筒15凸缘过盈配合,起发一体电机2通过螺栓与无人机载重平台固连,皮带轮二4的内孔与起发一体电机2的电机轴过盈配合,皮带轮二4和皮带轮一3通过皮带一10传递动力。
[0065]
隔磁筒14包括端面盘26,内隔磁筒24和外隔磁筒25,内隔磁筒24和外隔磁筒25同轴线配合,且沿各自周向方向开有六个直槽23,直槽23用于安装t形调磁块19,内隔磁筒24和外隔磁筒25的一侧端面均固定在端面盘26上,端面盘26中心开有通孔,通孔与中心轴12同轴线间隙配合,另一侧端面无连接,且内隔磁筒24在该侧端面设计有凸缘,凸缘与轴承二8外圈过盈配合,轴承二8内圈与中心轴的细轴段22过盈配合,轴承座20通过其凸缘上的螺栓孔与端面盘26同轴线固连,轴承座20的内孔与轴承三9的外圈过盈配合,轴承座20的外圈与皮带轮三5的内孔过盈配合,轴承三9的内圈与中心轴的细轴段22过盈配合。
[0066]
小转矩电机1通过螺栓与无人机载重平台平台固连,皮带轮四6的内孔与小转矩电机1的电机轴过盈配合,皮带轮四6和皮带轮三5通过皮带二11传递动力。
[0067]
条形磁铁16插入驱动筒15的直槽23中,磁铁的中部与直槽23过盈配合,t形调磁块的小端径向部27插入隔磁筒14的直槽23中,与直槽23过盈配合,t形调磁块的大端弧形部28的一侧与隔磁筒14的表面贴紧,另一侧与内圈磁铁13和外圈磁铁17之间留有气隙,防止内圈磁铁13和外圈磁铁17阻碍驱动筒15转动,但气隙要尽可能小,气隙过大会加大磁泄露,t形调磁块19能够集中内外圈磁铁17的磁力,并作用到条形磁铁16的磁极,减少了内外圈磁铁17的磁泄露,增大了输出转矩。
[0068]
控制系统包括电源,stm32f103c8t6控制器,霍尔元件,放大电路,滤波电路,接口
电路,数模转换电路,驱动电路一,驱动电路二,转速传感器一,转速传感器二,串口通信电路和上位机。霍尔元件安装在条形磁铁16的两个磁极上,传感器一用于检测小转矩电机1的转速,传感器二用于检测起发一体电机2的转速。霍尔元件(深圳市威森电子有限公司生产,型号为wsh130),放大电路(采用深圳市博海威电子科技有限公司生产的cs3808芯片),滤波电路(采用深圳市赛唯莱特科技电子有限公司生产的max275芯片),接口电路(采用深圳市赛唯莱特科技电子有限公司生产的max481芯片),数模转换电路(采用深圳市赛唯莱特科技电子有限公司生产的cs4334-ksz芯片),驱动电路一(采用深圳市盈创晶芯电子有限公司生产的l7010r芯片),驱动电路二(采用深圳市盈创晶芯电子有限公司生产的l7010r芯片),转速传感器一(广东德宝罗智控技术有限公司生产,型号为tss-q05n),转速传感器二(广东德宝罗智控技术有限公司生产,型号为tss-q05n),串口通信电路(采用南京沁恒微电子股份有限公司生产的ch9141芯片)和上位机(德国西门子股份公司生产,型号为6av7240-7dm37-3ka0)均为现有技术。
[0069]
霍尔元件经由放大电路、滤波电路、接口电路、数模转换电路与控制器进行通信;控制器经由驱动电路一与小转矩电机相连接;控制器经由驱动电路二与起发一体电机相连接;控制器通过串口通信电路与上位机进行通信;电源用于向控制器、霍尔元件、驱动电路一、驱动电路二供电;放大电路分别与转速传感器一、转速传感器二相连接。
[0070]
条形磁铁16的两个磁极和t形调磁块的小端径向部27设计为锯齿形,锯齿形的设计能够增大磁铁间沿驱动筒15周向方向的作用力,增大驱动筒15输出的转矩。
[0071]
皮带轮一3和皮带轮二4的外圈直径相同,皮带轮三5的外圈直径是皮带轮四6的外圈直径的三倍,皮带轮三5和皮带轮四6的传动比为三,可以选择转矩小的电机来驱动皮带轮四6,降低成本。
[0072]
内圈磁铁13,外圈磁铁17和条形磁铁16为永磁体,t形调磁块19的材料为软磁铁氧体。内圈磁铁与条形磁铁产生斥力,外圈磁铁与条形磁铁产生吸力。
[0073]
端面盘26上开有通孔,用于轴承座20和端面盘26通过螺栓连接。
[0074]
外隔磁筒25和内隔磁筒24上对应开有六对直槽23,分别有六个t形调磁块19安装在内隔磁筒24和外隔磁筒25的直槽23中,t形调磁块的大端弧形部28要覆盖内隔磁筒24和外隔磁筒25的整个表面,这样可以减小内圈磁铁13和外圈磁铁17的磁泄露。
[0075]
内隔磁筒24和外隔磁筒25的直槽23两端为圆弧形,降低应力。
[0076]
每对直槽23中两个直槽23的夹角为20度,且外隔磁筒25的直槽23相对于内隔磁筒24的直槽23沿顺时针方向在前,条形磁铁16位于每对中两个直槽23之间,这样的布置使条形磁铁16同时受到来自前方的吸力和后方的推力,且受力方向接近驱动筒15的周向方向,能使驱动筒15产生更大的驱动转矩。
[0077]
磁力辅助供能装置的工作及控制方式为:
[0078]
1.使条形磁铁16处于受磁力最大的初始位置:当蓄电池的电量小于95%时,磁力辅助供能装置开始工作,电源给霍尔元件供电,霍尔元件检测条形磁铁16在此刻受到的磁力大小,并通过放大电路,滤波电路,接口电路和数模转换电路传送到控制器,将检测到的磁力大小与预先设定的最大磁力比较,若此时的磁力为最大值,则控制器通过驱动电路一驱动小转矩电机1开始工作,若此时的磁力不是最大值,则控制器通过驱动电路二驱动起发一体电机2,起发一体发电机带动驱动筒15慢速转动,从而带动霍尔元件慢速转动,当霍尔
元件检测到条形磁铁16受到的磁力最大时,控制器控制起发一体电机2停止转动,从而得到条形磁铁16受磁力最大时的初始位置。
[0079]
2.控制磁力辅助供能装置发电:控制器驱动小转矩电机1转动,小转矩电机1带动皮带轮四6转动,皮带轮四6通过皮带二11将动力传递给皮带轮三5,动力通过轴承座20和端面盘26传递到隔磁筒14,隔磁筒14的转动使调磁块19的位置改变,因内圈磁铁13和外圈磁铁17对条形磁铁16施加有吸力和斥力,使驱动筒15随着隔磁筒14转动,然后带动皮带轮一3转动,皮带轮一3和皮带轮二4通过皮带一10传递转矩,最后皮带轮二4将转矩传递到起发一体电机2的电机轴,驱动起发一体电机2发电。控制器驱动小转矩电机1转动时,应控制小转矩电机1的转速逐渐增大,然后保持在测定的最高转速下工作。
[0080]
3.检测磁力辅助供能装置的供能极限:在控制器的驱动下,小转矩电机1的转速逐渐增大,传递到起发一体电机2的电机轴上的转速也逐渐增大,转速传感器一和转速传感器二将小转矩电机1和起发一体电机2的实时转速传输给控制器,当起发一体电机2的转速增加到一个值后不再增加,甚至有下降的趋势时,记录此刻小转矩电机1的转速,该转速即为小转矩电机1工作的最大转速,同时也就确定了磁力辅助供能装置的供能极限。转速信息能够通过串口通信电路传输给上位机,操作人员能够通过上位机和串口通信电路对转速进行人为干预。
[0081]
以上内容仅为本实用新型的较佳实施例,对于本领域的技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips